



高效下肢外骨骼用于人体运动辅助
摘要
完全自主系统的主要优势在于能够将系统的承载重量/质量功能与其前进运动功能解耦。通过降低推进电机的功耗、重量和尺寸,并延长电池的运行时间,使外骨骼更加高效。通过使用柔性传感器监测受试者小腿和踝关节运动以及足底压力,实现了人机接口。当受试者单腿站立并摆动另一条腿时,身体重量完全由站立腿的外骨骼结构支撑,此时膝关节运动被完全锁定。关节电机体积小,且从电池消耗的电能较少,因为在行走过程中它们不需要支撑受试者的体重。
1 引言
在过去的十年中,研究人员一直致力于开发下肢外骨骼,这些外骨骼目前已应用于多个领域,包括军事领域的动力增强[1]、医疗辅助[2]以及康复[3, 4]。在这类设备中,人体提供控制信号,而外骨骼执行器则提供执行任务所需的功率。在下肢外骨骼方面,大多数先前的研究人员将注意力集中在为步态障碍患者或老年人[5]开发助行系统上。其中一个系统是由筑波大学的三上幸一郎(Yoshiyuki Sankai)开发的HAL(混合辅助腿),旨在辅助人体腿部肌肉行走[6]。该系统基于对人体肌肉的肌电图(EMG)感知作为主要驱动信号。这一研发已产生多个版本的HAL,最新版本为HAL‐5 2009[7]。该外骨骼在髋关节和膝关节处采用电机驱动,其余关节保持自由。
伯克利下肢外骨骼(BLEEX)[8]旨在增强人体力量和耐力以实现载荷运输。该外骨骼在所有三个矢状关节和髋部的两个冠状关节上采用了液压驱动,其余关节保持自由。华东理工大学(ECUST)设计的华东理工大学外骨骼机器人(ELEBOT)与BLEEX具有相似的设计目标,但系统更为简化[9]。尽管上述外骨骼设计在低效率下运行需要大量功率,麻省理工学院(MIT)[10]的一种外骨骼设计试图降低负载运输时的功率需求。该外骨骼仅在髋部矢状关节处采用串联弹性驱动,在膝关节处采用可变阻尼器,在踝部矢状关节处采用弹簧。目前仍存在各种问题有待解决,其中最重要的仍是创建一种高效利用能源和成本的系统,使外骨骼能够长时间运行。这类更轻便且低成本的设备目前是医学和军事领域重要的工程研究方向[11]。
2 机械设计与组件
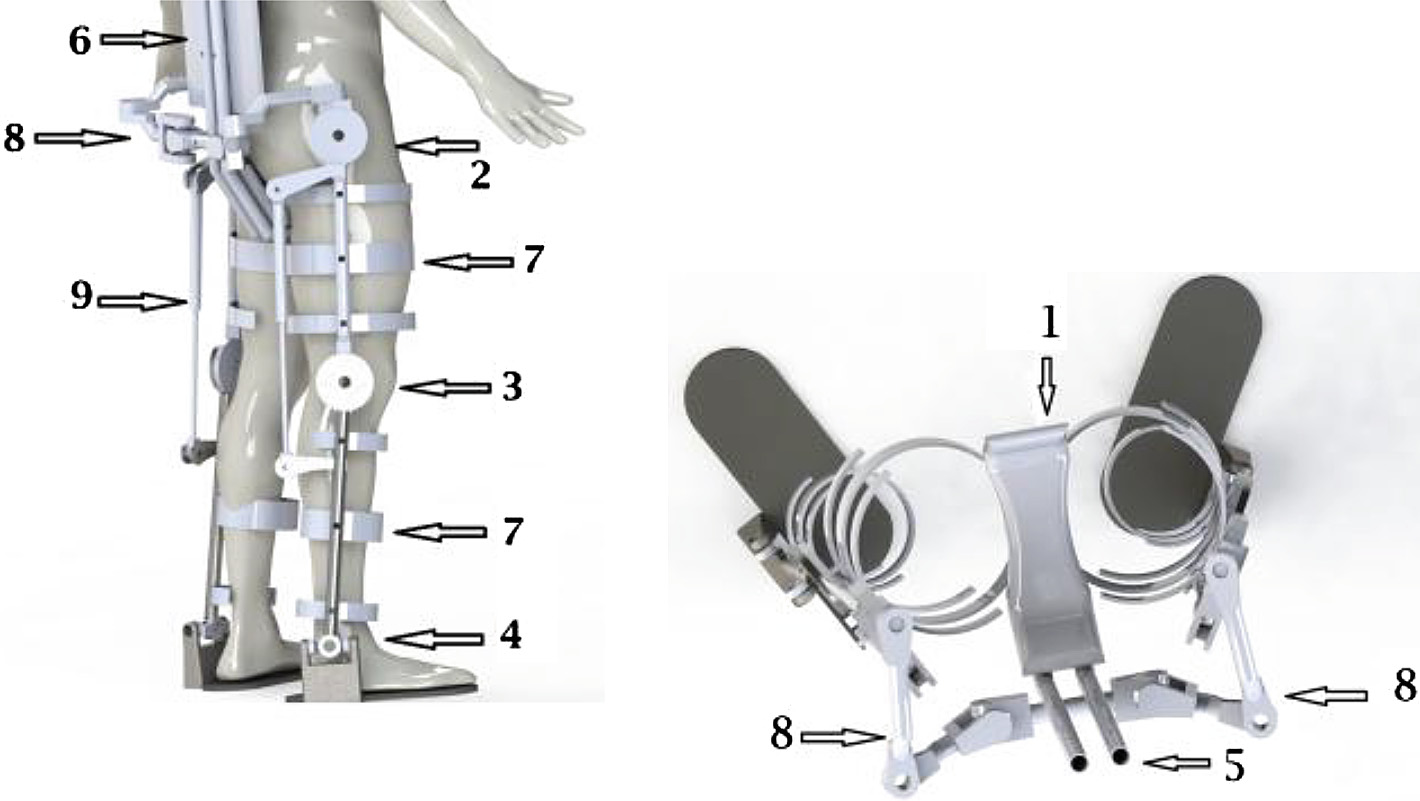
图1显示了在 SolidWorks 中设计的外骨骼结构的概念草图。在图中,座椅 1 用于支撑受试者的身体并承载体重。每条外骨骼腿具有四个自由度:髋关节 2 处两个,膝关节 3 处一个,踝关节 4 处一个,以允许腿进行前后和侧向运动。位于受试者胯部之间的带缓冲垫的座椅 1 连接到后方的两根平行刚性管 5 上。安装在刚性管上的背板 6 作为控制与电源安装平台。在髋部位置,两根平行刚性管向外延伸至两个髋部冠状关节。连接随后传递到髋关节 2 的两侧,此处设有矢状和横断关节,再依次传递到膝关节 3 并通过踝关节 4 到达地面。两条外骨骼腿通过柔性绑带 7 固定在受试者的腿上。髋部水平的单自由度四杆联动机构 8 配备旋转关节,可实现外骨骼腿围绕垂直轴的以髋部为中心的侧向旋转。其余三个单自由度
位于髋关节 2、膝关节 3 和踝关节 4 的平行轴旋转关节提供关节屈曲的自由度。必要时,使用气动缸 9 锁定膝关节 3 的运动以承载体重。
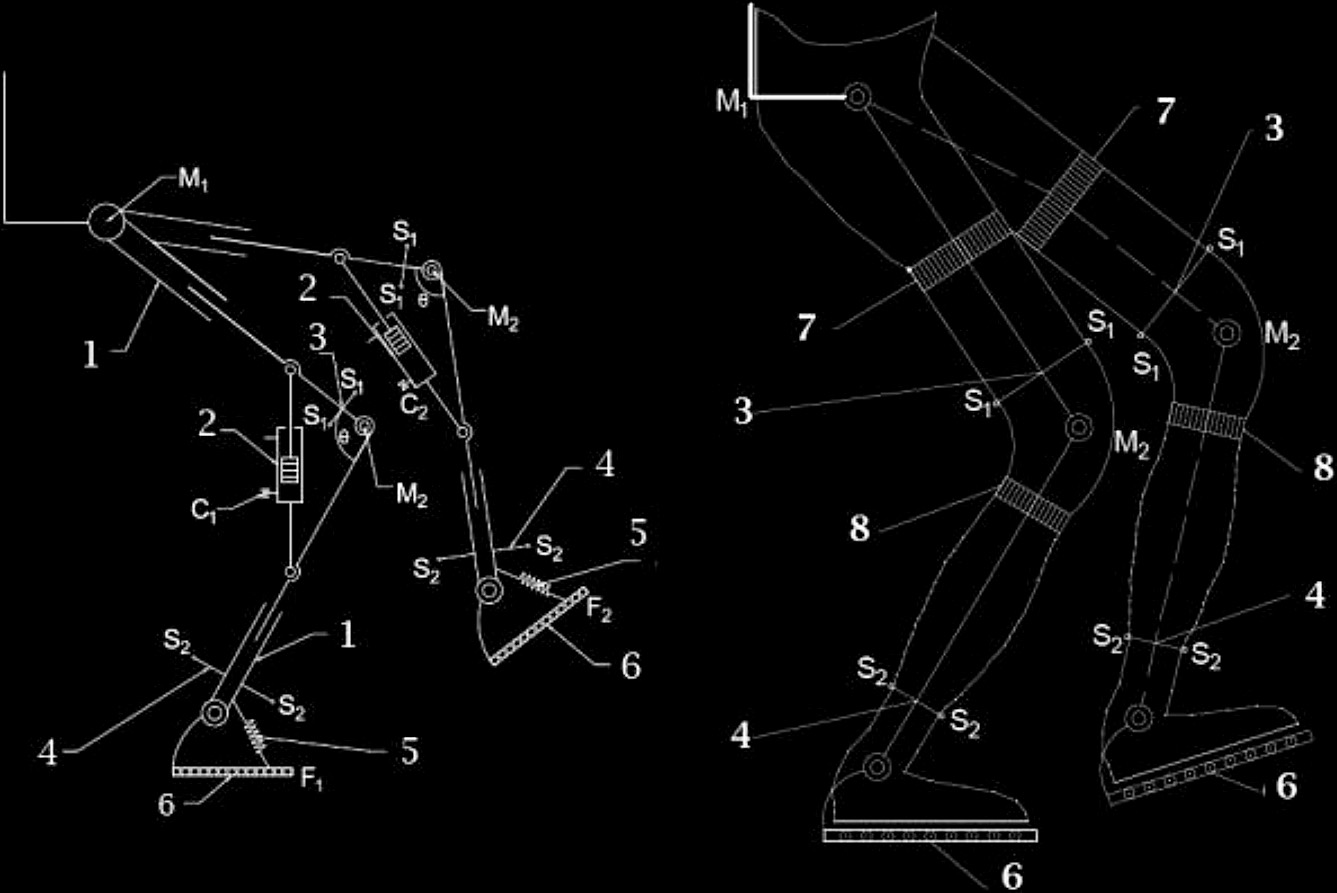
图2显示了外骨骼的示意图。在这些图中,1 是外骨骼的可调伸缩部件;2 是能够抑制膝关节运动的假体气缸;3 和 4 是用于检测受试者大腿和小腿运动的传感器;5 是用于支撑外骨骼足部 6 的弹簧;7 和 8 是柔性带,用于将外骨骼固定在受试者的大腿和小腿上。在图中,M1和 M2是驱动每条腿的髋关节和膝关节的电机;C1和 C2是气缸 2 的电磁阀,能够抑制膝关节的运动;S1和 S2是柔性条带 3 和 4,其上粘贴有应变片,能够感知使用者肢体的微小运动;F1和 F2是足底压力传感器,用于感知行走过程中地面施加在外骨骼鞋底 6 上的压力大小。当使用者坐在座椅上时,通过机械结构将重量传递至地面,从而在外骨骼鞋底产生压力。
3 外骨骼操作
所有执行器(即电机 M1, M2 以及气缸电磁阀 C1 和 C2)的操作取决于脚部压力传感器 F1 和 F2 所感知的压力大小(图 2)。脚部压力取决于受试者的实际姿势,可分为三种不同情况。在情况1中,受试者单腿站立,对应腿部足底传感器的读数将达到最大值 Pb,而另一条腿的读数为零。在情况2中,受试者静止站立于双腿上,此时受试者总体重几乎平均分配在两条腿上,压力读数约为 Pb/2。在情况3中,受试者正处于将重量从一条腿转移到另一条腿的过程中,因此一条腿的压力读数将降至零,而另一条腿的压力读数将上升至最大值。气缸的操作由这些
可以根据实际膝角 Ɵ 和足底压力读数 Pb 的以下操作规则来抑制膝关节运动和电机:每条腿的电机 M1 和 M2 仅在满足以下条件时才会启动:Ɵ > Ɵmin 且来自脚部传感器的压力读数 P < Pmin,以便将腿抬离地面并迈步。气缸电磁阀 C1 和 C2 仅在满足条件 Ɵ < Ɵmin 时才会启动。这意味着当膝盖弯曲达到允许的最小角度时,气缸才会被激活。最小弯曲角度 Ɵmin 的取值取决于使用者平常的行走方式。
电机 M1 和 M2 的控制策略旨在确保外骨骼结构能够跟随使用者腿部的实际运动,且不会对其造成阻碍。传感器 S1 和 S2(带有粘贴式应变片的柔性条带)安装在外骨骼连杆上(图 2)。当使用者肢体开始运动时,肢体将接触并弯曲这些条带。传感器将实时检测使用者移动肢体的意图,并将信号发送至 PID 控制器。闭环控制器将立即响应,启动髋关节和膝关节电机 M1 和 M2,以驱动外骨骼连杆远离使用者肢体,从而恢复条带的原始形状。
4 结论
本文描述了一种新型外骨骼系统的机械设计方法及有效控制,旨在增强人们的行走能力,也可用于轻度腿部损伤患者的康复。其核心思想是利用外骨骼将腿的承重能力与其身体前进能力解耦。这一目标通过对外骨骼执行器的特殊逻辑与管理实现。该外骨骼节能高效,因为其所用的电动机尺寸更小,且不像其他现有外骨骼设计那样参与支撑重量。

















 48
48

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









