






路径规划人工势场法以及改进人工势场法matlab代码,包含了斥力,引力,合力势场图,成功解决了机器人在目标点周围徘徊动荡的问题。
ID:9229641748483411
yjjyzzZ
路径规划是机器人领域中的重要任务之一,它涉及到如何使机器人能够在复杂环境中找到最优的路径,并成功到达目标点。针对路径规划问题,人工势场法是一种常用且有效的方法之一。本文将介绍人工势场法以及改进人工势场法,并提供相关的 MATLAB 代码,以解决机器人在目标点周围徘徊动荡的问题。
首先,我们来介绍人工势场法的基本原理。人工势场法是基于物理学中势能的概念进行设计的。在路径规划中,我们将机器人看作是一个粒子,其位置在二维平面上进行移动。为了使机器人能够到达目标点,我们设置了两种类型的势场:斥力场和引力场。
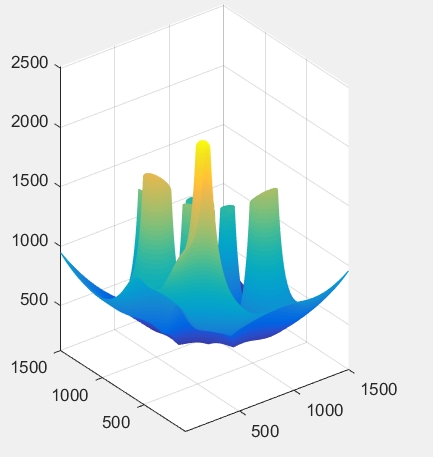
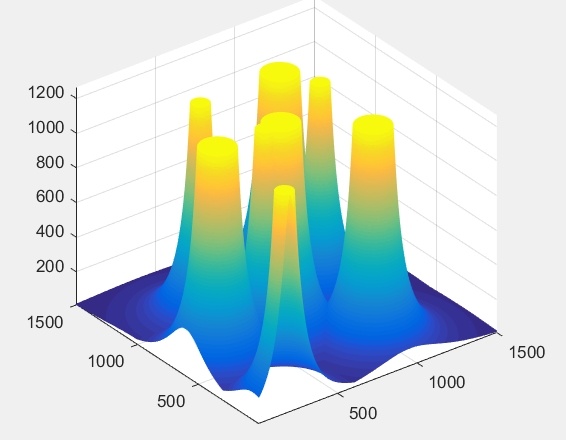
斥力场是用来避免机器人与障碍物发生碰撞的。当机器人靠近障碍物时,斥力场的作用会使机器人产生一种排斥力,使其远离障碍物。斥力场的大小与机器人与障碍物的距离成反比,距离越近,斥力越大。
引力场是用来引导机器人朝着目标点靠近的。引力场的作用会使机器人朝着目标点产生一种吸引力,使其逐渐接近目标点。引力场的大小与机器人与目标点的距离成正比,距离越近,引力越大。
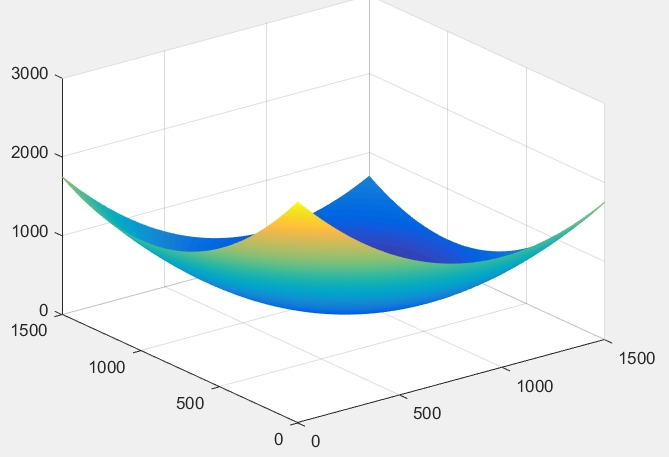
为了计算机器人在斥力场和引力场中所受到的合力,我们可以使用以下公式:
F_total = F_repulsive + F_attractive
其中,F_total 代表机器人所受到的总合力,F_repulsive 代表机器人在斥力场中所受到的排斥力,F_attractive 代表机器人在引力场中所受到的吸引力。
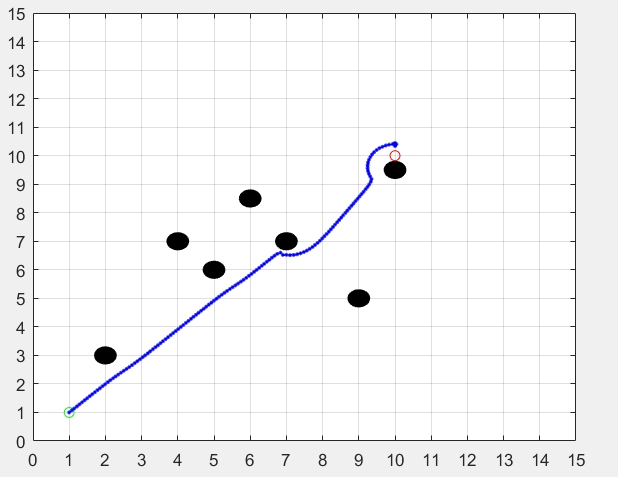
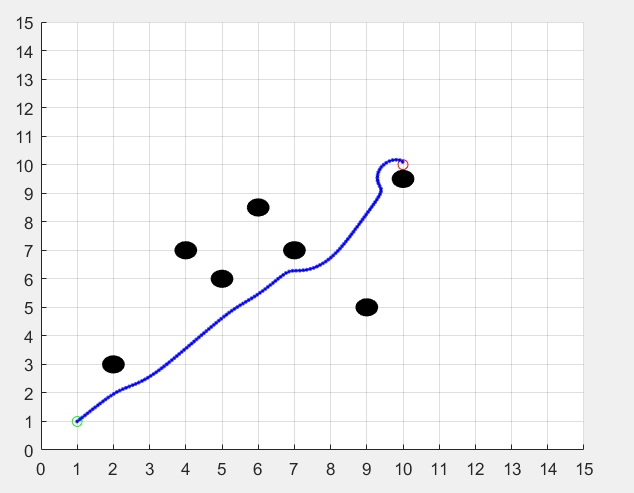
为了更好地理解人工势场法的实现过程,我们提供了 MATLAB 代码来演示路径规划的过程。代码中包含了斥力场、引力场以及合力场的计算方法,以及机器人在二维空间中移动的过程。通过运行这段代码,我们可以观察到机器人在斥力场和引力场的作用下,成功地找到了到达目标点的最优
以上相关代码,程序地址:http://coupd.cn/641748483411.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









