惯性导航
 关注
关注
 分享
分享
文章平均质量分 82
惯性导航
Bungehurst
极限尤可突破,至臻亦不可止
展开
-
卡尔曼滤波算法
卡尔曼滤波算法非常喜欢这个配图,先贴出来出处:http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/卡尔曼滤波的五个公式原创 2020-06-01 15:27:49 · 1521 阅读 · 0 评论 -
MPU6050配置及读数换算
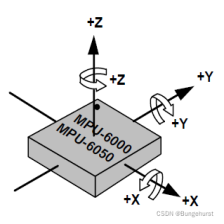
MPU6050配置硬件平台开发板开发板采用WHEELTEC的STM32F405RG开发板,其板载MPU6050模块一个,其轴向正方向如下图所示:MPU6050MPU-6050集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI 接口仅在MPU-6000 可用)。MPU-60X0 也可以通原创 2022-03-19 14:19:15 · 3484 阅读 · 0 评论 -
IMU误差&测量模型
IMU误差模型IMU误差主要由三个部分构成:交轴耦合误差(Axis-misalignment),比例因子误差(Scale Factor),零偏(Bias)。其中,零偏为加性误差,交轴耦合和比例因子误差为乘性误差。传感器误差模型1. 交轴耦合误差(Axis-misalignment)交轴耦合误差是由于IMU的三个轴非正交导致的,其衡量了非正交的程度,图中绿色的是理想的正交系(定义为B系),而红色的为传感器的非正交系(定义为S系),因此,需要求解出S系到B系的映射关系,才能得到每个轴较为准确的输出。原创 2022-03-20 17:10:34 · 5065 阅读 · 0 评论 -
『imu_tk』工具标定IMU的基本原理
『imu_tk』工具标定IMU的基本原理IMU误差模型对于加速度计和陀螺仪,定义正交系AOF(GOF)和非正交系AF(GF):AOF(GOF)系的x轴与AF(GF)系x轴重合AOF(GOF)系的y轴与AF(GF)系的xy平面重合同时,定义正交系BF为载体系,非正交系S为传感器系。在旋转的角度较小时,可以定义非正交系中的测量sSs^SsS到正交系B的变换为:sB=TsS, T=[1−βyzβzyβxz1−βzx−βxyβyx1]s^B=Ts^S, \ \原创 2022-05-08 12:14:15 · 3232 阅读 · 9 评论