



 文章讲述了离职者面对领导挽留时的纠结心态,强调提离职后应坚决离开,因为领导通常会寻找替代并减少重要任务分配。作者建议用法律手段维护权益,如三十天通知期后直接离职或通过劳动仲裁。
文章讲述了离职者面对领导挽留时的纠结心态,强调提离职后应坚决离开,因为领导通常会寻找替代并减少重要任务分配。作者建议用法律手段维护权益,如三十天通知期后直接离职或通过劳动仲裁。
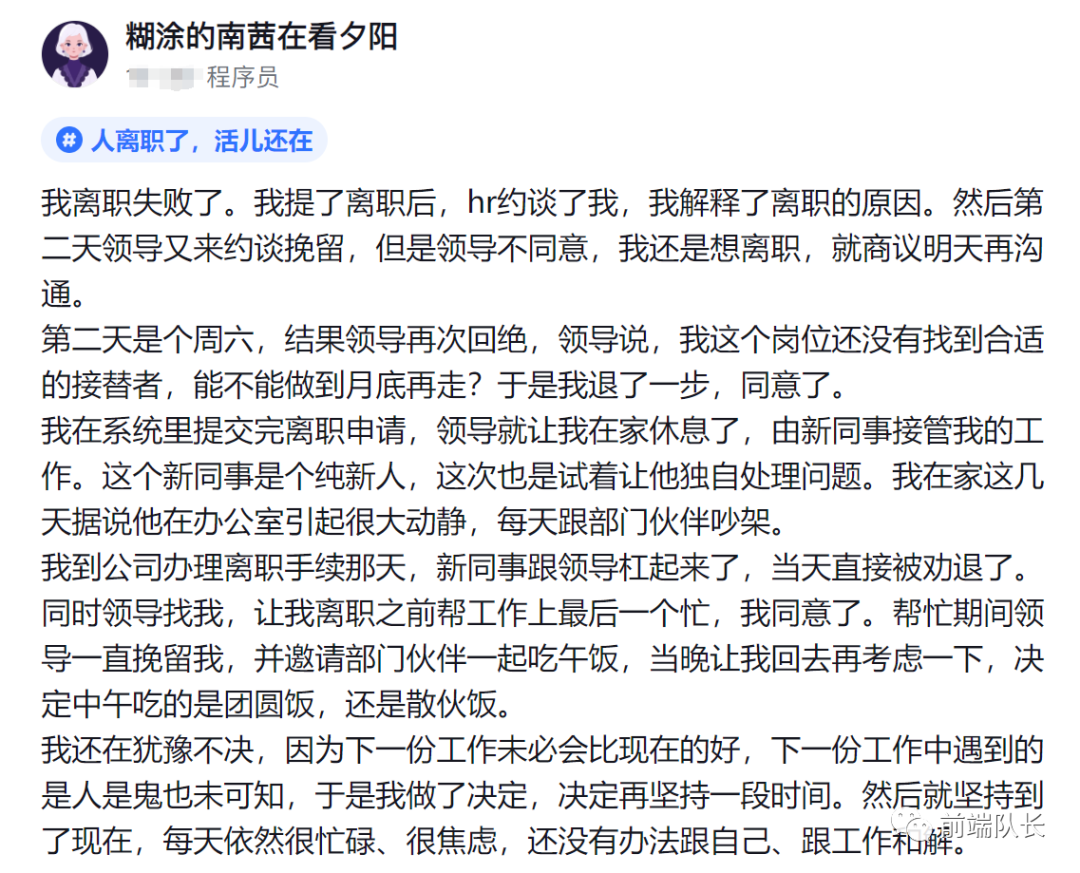
今天看到一个帖子,一名网友发帖子称自己离职失败了。提了离职后,领导一直在挽留,期间还让该网友回家休息,让一个新人来独自处理问题,结果新人跟领导吵了起来,于是领导再次挽留。网友最后考虑到,下一份工作未必会比现在的好,于是就留了下来,但是每天很忙碌,很焦虑,没有办法跟自己和工作和解。
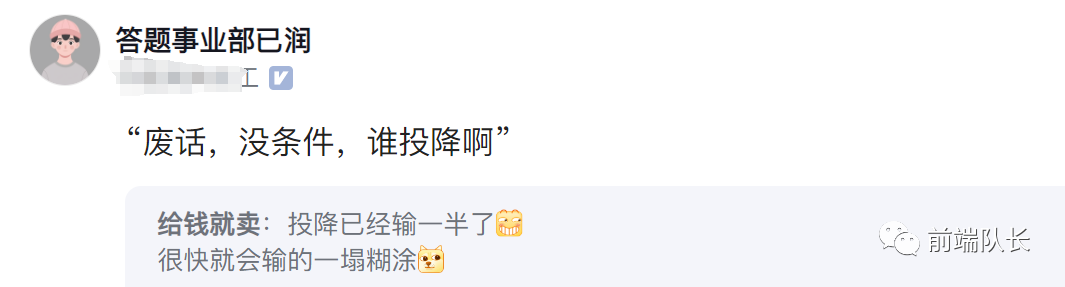
有网友看到后直接怒评:“废话,没条件,谁投降啊!”
相信很多人都会遇到类似的问题,就是已经提出离职后,如果领导挽留的话,要不要留下来?
如果留下来的话,可能内心感觉不舒服,因为肯定是哪里让自己感到不舒服才会提出离职的,但是如果走的话,又抹不开面子,感觉有点对不起领导的感觉。
队长的第一份工作就有类似的经历。因为是第一份工作,很多都不会,还犯过很多错误,是领导一直带着我们成长的,说实话,当时感觉公司就像半个家一样,对领导也非常感激。于是,一干就是三年,期间就涨过一次薪水,涨了1000,后面就没有再涨过了。
后面,因为要还房贷了,资金压力一下子就起来了,没办法,向领导提出离职,领导知道我的处境,也答应再涨1000元,希望我能留下来。但是我知道,这和外面市场的价格还是有差距的,于是我强硬要走。好在,领导比较好,没有强行挽留。虽然我走了,但是对领导的印象还是很好的,也很感激领导当年对我的栽培。
很多朋友其实不知道,一旦提出离职后,就不要纠结了,即便领导挽留也要坚决离职。
为什么呢?
已经提了离职的人,领导其实已经知道你的心思了,除非你是非常精英的人才,否则领导只是短暂的想把你留住,因为没人填坑。
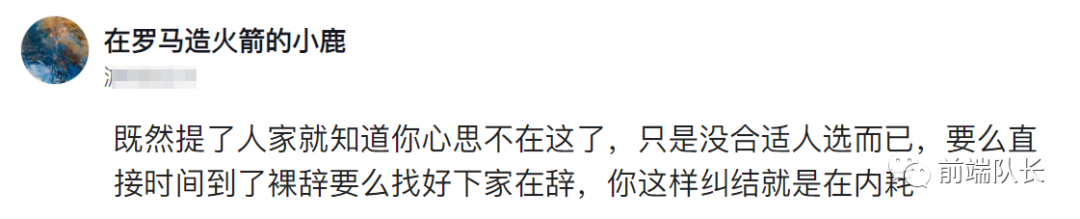
领导为了让项目进展顺利,肯定会想办法找一个稳定的人,而不是一个随时可能离开的人。所以,一旦提了离职,领导会想办法扶植下一个你的替代品,并且,不会再把重要的任务分给你。很好理解,如果是你,你也会这样做的。
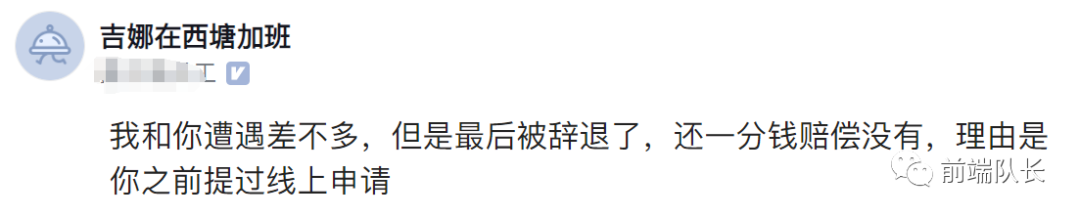
有的小伙伴就已经亲身验证了,最后被辞退,并且一分钱赔偿都没有,就这么冷酷,这就是职场真实的模样。
还有一点,就是你的领导没有诚意。
既然非常想要你留下来,但是却只动嘴皮子,一点实际行动都没有,看来领导只是把你当作工具而已啊!

所以,就有了开头的网友怒评:废话,没条件,谁投降啊!
还有人问,道理我懂了,但是领导一直不批怎么办?
很简单,劳动合同法规定,员工提前三十日以书面形式通知用人单位,可以解除劳动合同。
可以发个邮件说明离职,并且抄送人力和各领导。三十天后直接走人就可,不给离职证明直接劳务仲裁,百分百胜!
今天就到这!
关注前端队长,与你一同成长!
-------------END--------------
更多推荐阅读:
点击这里关注队长,记住星标哦~

















 1118
1118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









