






UR5机器人仿真 机械臂simulink simscape
正向运动学,逆向运动学
关节空间轨迹规划 五次多项式轨迹规划
笛卡尔空间轨迹规划 直线插补
还包含机器人工具箱建立的模型对比
ID:28150668334912143
爱小马的海盐大傻
UR5机器人是一种常见的工业机器人,具有多自由度和大臂长度的特点。在工业生产中,UR5机器人被广泛应用于装配、焊接、搬运等任务。为了提高机器人的工作效率和精确度,研究人员需要对UR5机器人进行仿真和轨迹规划。
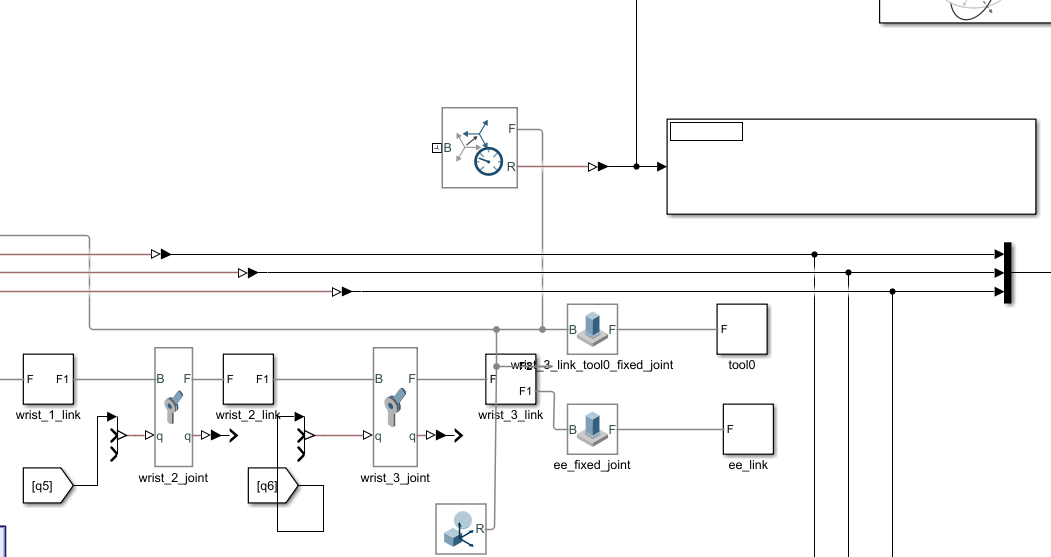
在进行UR5机器人仿真时,一种常用的方法是使用Simulink和Simscape这两个工具。Simulink是一种基于模型的设计和仿真工具,可以对系统进行动态建模和仿真分析。Simscape是Simulink中的一个扩展库,可以用于建立多领域物理系统的仿真模型。结合Simulink和Simscape,研究人员可以建立一个包含UR5机器人的仿真模型,并模拟机器人的运动过程。
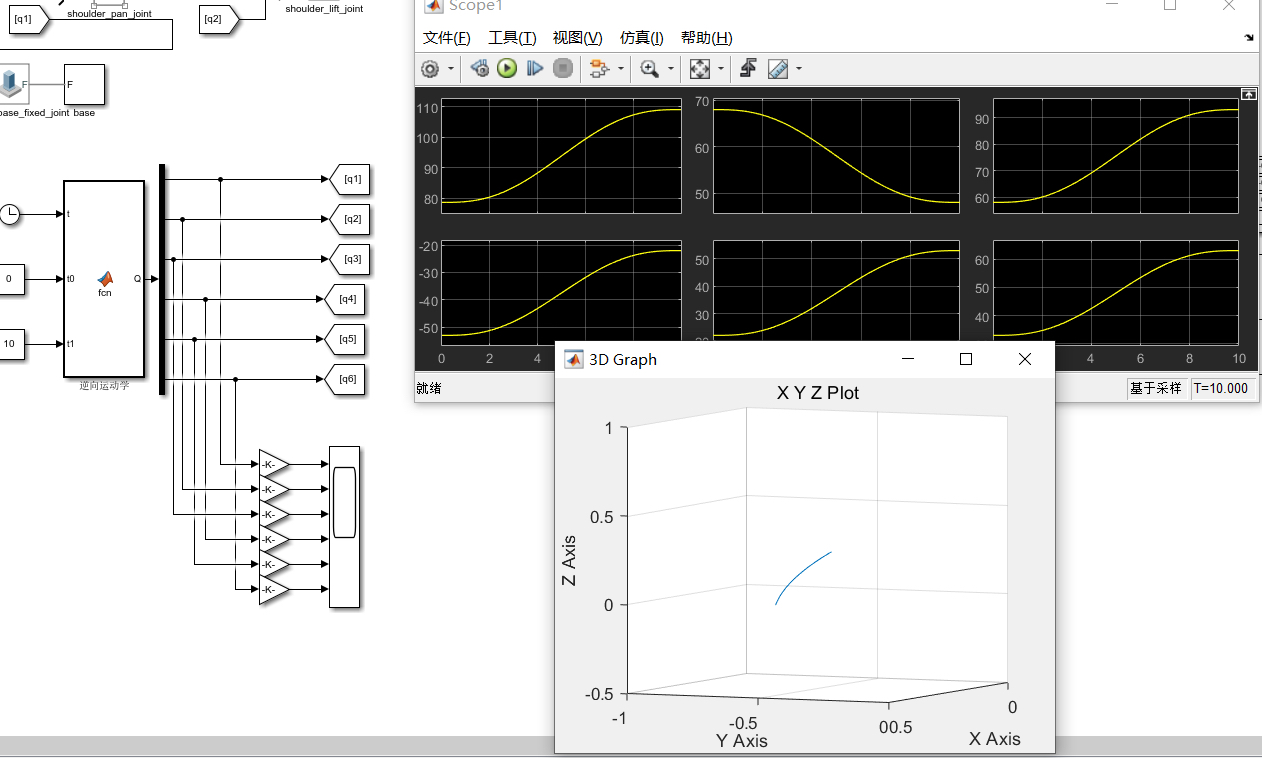
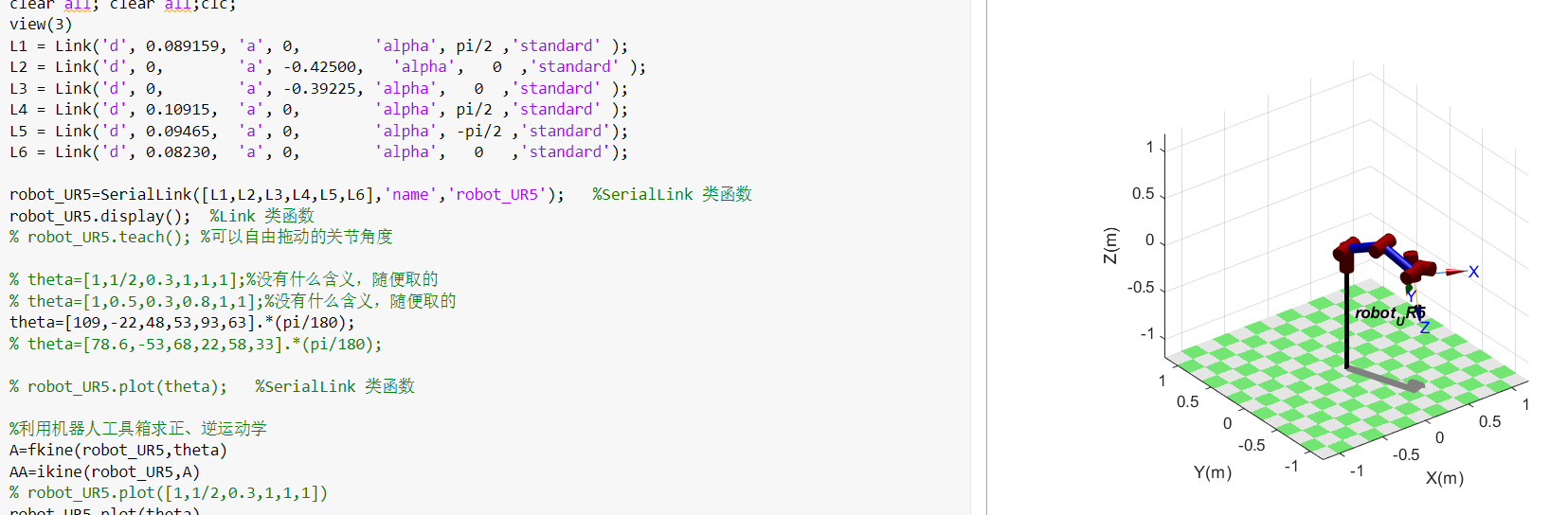
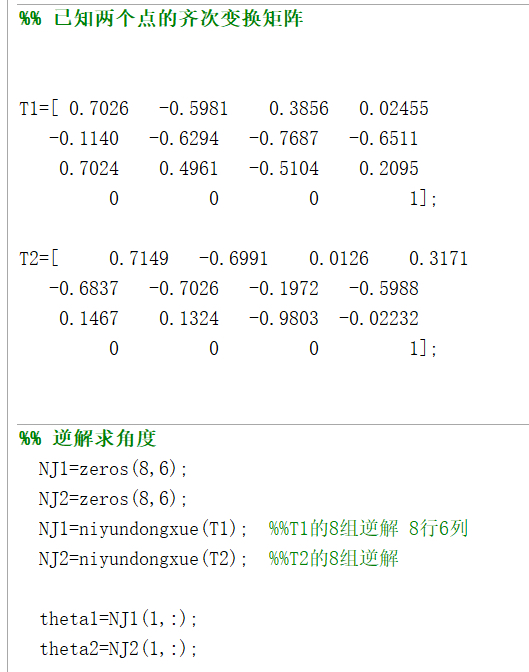
在进行UR5机器人的运动规划时,需要考虑正向运动学和逆向运动学两个问题。正向运动学是指根据机器人的关节角度求解机器人末端执行器的位置和姿态。逆向运动学则是指根据末端执行器的位置和姿态求解机器人的关节角度。通过正向运动学和逆向运动学的分析,可以实现机器人的轨迹规划。
在关节空间轨迹规划中,常用的方法是使用五次多项式进行轨迹规划。五次多项式可以通过给定起始点、终止点、起始时间和终止时间,求解出机器人关节角度随时间变化的轨迹。通过对五次多项式的参数进行调节,可以实现机器人在关节空间内的平滑运动。
在笛卡尔空间轨迹规划中,常用的方法是使用直线插补进行轨迹规划。直线插补可以通过给定起始点、终止点和插补点的个数,求解出机器人在笛卡尔空间内的轨迹。通过对插补点的位置进行调节,可以实现机器人在笛卡尔空间内的精确定位。
此外,机器人工具箱的建立也是UR5机器人仿真和轨迹规划的关键步骤之一。机器人工具箱可以提供UR5机器人的各种函数和工具,方便研究人员进行机器人的建模和控制。通过对机器人工具箱的模型进行比较,可以选择最适合自己需求的建模方法和控制策略。
综上所述,UR5机器人仿真和轨迹规划是一个复杂而又关键的技术问题。通过使用Simulink和Simscape进行仿真建模,可以实现对UR5机器人的准确模拟。通过正向运动学和逆向运动学的分析,可以实现机器人的轨迹规划。在关节空间轨迹规划和笛卡尔空间轨迹规划中,分别可以使用五次多项式和直线插补的方法实现机器人的平滑运动和精确定位。此外,机器人工具箱的建立也是非常重要的,可以提供各种方便的函数和工具,供研究人员使用。在未来的研究中,可以进一步探索UR5机器人的仿真和轨迹规划方法,以提高机器人的工作效率和精确度。
相关的代码,程序地址如下:http://nodep.cn/668334912143.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









