






简介
动态规划(Dynamic Programming)是一种解决复杂问题的方法,通过将问题分解成更小的子问题来求解,然后将子问题的解合并起来得到原问题的解。动态规划通常用于优化问题,可以在不重复计算相同子问题的情况下高效地解决问题
动态规划最关键的就是找出状态转移方程,即相同问题在不同规模下的关系
寻找状态转移方程的一般性步骤
- 找到相同问题(重叠子问题)相同问题必须能适配不同规模
- 找到重叠子问题之间的关系
- 找到重叠子问题特殊解
下面通过斐波那契数列进一步了解动态规划
斐波那契数列
斐波那契数列,前几项为0、1、1、2、3、5、8、13等。斐波那契数列中的每一项(除了前两项外)都是前两项之和
状态转移方程:
// 当n>2
dp(n) = dp(n-1) + dp(n-2)
// 当n<=2
dp(n) = 1
问题:求斐波那契数列第n项的值
代码实现
const fibonacci = (n) => {
if(n <= 2) return 1
let p1 = 1, p2 = 1, r = 1
for (let i = 2; i < n; i++) {
r = p1 + p2
p2 = p1
p1 = r
}
return r
}
console.log(fibonacci(2)) // 1
console.log(fibonacci(6)) // 8
函数定义:这段代码定义了一个名为 fibonacci 的箭头函数,接受一个整数 n 作为参数
边界条件处理:在函数内部,首先判断如果 n 小于等于 2,则直接返回 1。因为斐波那契数列从第三项开始,每一项都是前两项之和
迭代计算:接着定义了三个变量 p1、p2 和 r,分别表示斐波那契数列中的第 i-2、i-1 和 i 项。初始时,p1 和 p2 均为 1,r 初始值也为 1
循环计算:通过 for 循环从第 2 项开始计算第 n 项的斐波那契数。在每一次循环中,r 更新为 p1 和 p2 的和,同时更新 p2 为原来的 p1,p1 为新的 r。这样依次迭代计算直到计算出第 n 项的斐波那契数值
返回结果:最后返回计算得到的第 n 项斐波那契数的值 r
这种方式实现空间复杂度为 O(1),时间复杂度为 O(n)
不同路径
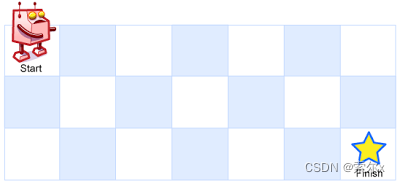
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )
问总共有多少条不同的路径?
示例
输入: m = 3, n = 7
输出: 28
分析状态转移方程
dp(i, j) 到达第i行第j列共有多少条路径,用来表示最终解和普通解
dp(i, j) = dp(i - 1, j) + dp(i, j - 1) 到达最终解的路径有两条,分别是左侧和上侧的位置
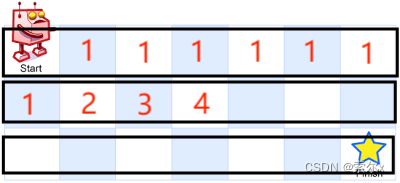
dp(i, j) = 1 特殊解,当i == 0 或 j == 0时第一行和第一列最短路径为1
代码实现
递归
const uniquePaths = (m, n) => {
const cache = {} // 存储计算过的数据 防止重复计算
const dp = (i, j) => {
if(i === 1 || j === 1) {
return 1
}
const key = `${i}-${j}`
if(cache[key]) {
return cache[key]
}
return cache[key] = dp(i, j - 1) + dp(i - 1, j)
}
return dp(m - 1, n - 1)
}
函数定义:代码定义了一个名为 uniquePaths 的箭头函数,接受两个参数 m 和 n,分别表示行数和列数
cache 对象:在函数内部定义了一个空对象 cache,用于存储已经计算过的路径数量,防止重复计算
递归函数 dp:定义了一个名为 dp 的递归函数,接受两个参数 i 和 j,分别表示当前位置的行号和列号
基本情况处理:在递归函数中,首先判断如果当前位置的行号为 1 或列号为 1,则说明只有一种路径可以到达这个位置,即返回 1
使用缓存加速计算:接着构造一个字符串 key,用来表示当前位置的唯一标识。如果 cache 中已经存在该 key 对应的值,则直接返回该值
递归计算路径数量:在没有缓存的情况下,通过递归调用自身,计算当前位置上方和左侧位置的路径数量之和。同时将结果存入 cache 对象中以备将来使用
返回结果:最终返回从起点到终点的唯一路径数量,即调用 dp 函数传入 (m-1, n-1) 的位置作为起点
循环
可以利用二维数组存储计算过程中的值,初始化第一列和第一行为1,然后遍历每个位置,计算其值为上面位置和左边位置的值之和
代码实现
const uniquePaths = (m, n) => {
const dp = []
for (let i = 0; i < m; i++) {
for (let j = 0; j < n; j++) {
if(i === 0 || j === 0) {
dp[i][j] = 1
} else {
dp[i][j] = dp[i - 1, j] + dp[i, j - 1]
}
}
}
return dp[m - 1][n - 1]
}
定义二维数组:代码定义了一个空的二维数组 dp 用于存储计算过程中的结果,该二维数组将用来保存从起点到每个位置的唯一路径数量
动态规划计算:通过两层嵌套的循环遍历所有的行和列,对每个位置进行计算其唯一路径数量
基本情况处理:在每次遍历中,如果当前位置位于第一行或第一列(即 i 或 j 等于 0),则直接将该位置的路径数量设为 1,因为在第一行和第一列上只有一条路径可以到达该位置
动态规划转移方程:对于其他位置 (i, j),其唯一路径数量可以根据其上方位置 (i-1, j) 和左侧位置 (i, j-1) 的唯一路径数量之和得到。因此,根据动态规划的转移方程 dp[i][j] = dp[i-1][j] + dp[i][j-1],计算当前位置的唯一路径数量
返回结果:最后返回终点位置 (m-1, n-1) 处的唯一路径数量,即为问题的解
利用滚动数组优化空间复杂度
上面的示例在代码运行的过程会产出m个数据,每个数组中有n个元素,空间复杂度为O(m*n)
对整个数据分析过后发现一个规律,用一个数组表示当前数组,初始化的时候生成一个长度为n的数组,在计算第m行的时候就取前一项(左侧)的值和当前数组(上侧)的值,这种数组称为滚动数组,利用滚动数组降维打击后空间复杂度优化为O(n)

const uniquePaths = (m, n) => {
const dp = new Array(n).fill(1)
for (let i = 1; i < m; i++) {
for (let j = 1; j < n; j++) {
dp[j] += dp[j - 1]
}
}
return dp[j - 1]
}
总结
通过两个示例介绍了动态规划算法,其核心是分析相同问题(重叠子问题)找到状态转移方程,另外可以考虑优化一下空间复杂度,有好的想法欢迎大家留言分享,共同进步















 350
350











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









