







目录
一、雷达系统组成
与雷达测距相关的系统组成包括时序控制、调制器/发射机、天线、收发开关、接收机和信号处理机模块;时序控制产生同步时序信号,调制器/发射机产生调制信号并馈送给天线。天线在发射和接收模式之间切换,由收发开关控制。接收机放大雷达反射信号,为信号处理做准备。信号处理机提取目标信息。如图1所示为雷达测距时信号流示意图。红色箭头为发射信号流,蓝色箭头为接收信号流,绿色箭头为时序控制信号流。
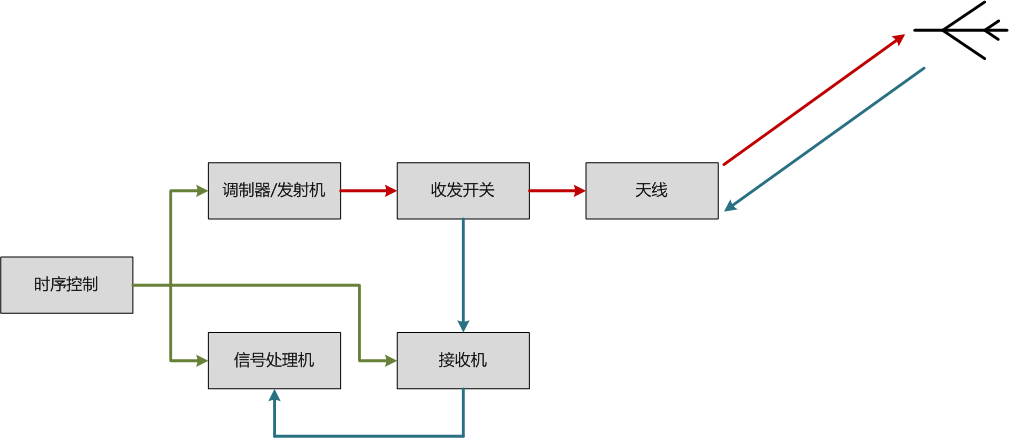
图1 与测距相关的系统组成
二、雷达测距原理
在发射期间,信号从调制器出发,调制器产生雷达中频信号,经过上变频、滤波后到达收发开关,收发开关将雷达电磁能量导向天线,进而发出。电磁波在空中传输的过程遇到目标产生反射信号,信号被接收机接收时,收发开关将接收的雷达回波导向接收机。接收机放大雷达反射信号并且为信号处理做准备。目标信息的提取由信号处理机模块执行。
目标距离是通过测量时间延迟
,即脉冲在雷达与目标之间的双程传播时间来计算的。因为电磁波以光速
传播,所以有:
| (1) |
三、占空比
雷达通过不断发射脉冲进行目标探测,脉冲与脉冲之间的重复间隔称为脉冲重复周期(Pulse Repetition Interval,PRI),常用符号表示。重复周期的倒数称为重复频率(Pulse Repetition Frequency,PRF),常用符号
来表示,有
。在每个PRI期间,雷达有发射信号时间和不发射信号时间,发射信号时间称为雷达信号脉宽(Pulse Width,PW)常用符号
来表示。
雷达信号脉宽于重复周期之间的比值称为占空比。对于收发一体的雷达,由于要留出部分时序资源接收雷达信号,因此占空比
总是小于1的一个数值。在工程时间中,由于雷达发射信号时典型雷达发射机效率在30%-60%之间,剩余40%-70%的能量以热损耗形式,为防止能量过热造成器件性能降低甚至期间损坏,通常情况下占空比
。
若雷达的峰值发射功率为,则雷达的平均发射功率为
,雷达脉冲能量为:
| (2) |
四、最大不模糊距离
由于雷达在重复发射脉冲信号,因此仅有在下一个发射脉冲发射出去之前接收的回波信号才唯一的对应本次脉冲的回波信号,此时雷达发射脉冲与接收脉冲间隔时间为重复周期,对应的目标距离为:
| (3) |
即半个PRI对应的距离,该距离称为雷达测量目标的不模糊距离。当目标距离超过时,雷达系统无法判定是第几个脉冲的回波信号,即会产生测距模糊。如图2所示,当回波脉冲超过第2个发射脉冲时,则该回波脉冲有可能是第一个发射脉冲的回波,其目标距离为
;也有可能是第二个发射脉冲的回波,其目标距离为
,即产生测距模糊。两个距离模糊值之间相差
即最大不模糊距离,因此,当产生距离模糊时,相邻距离模糊值之间相差上一个PRI对应的不模糊距离。
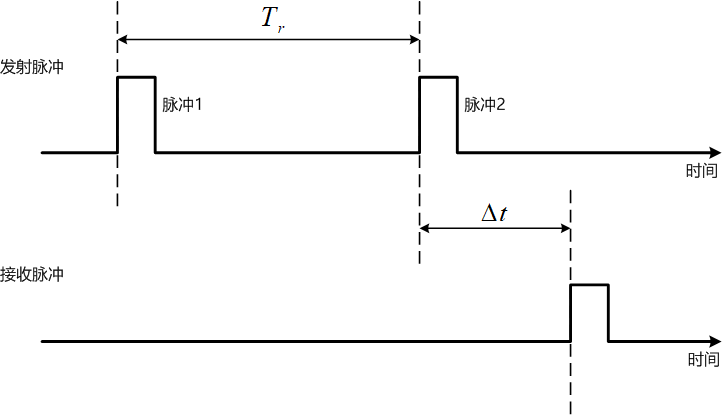
图2 最大不模糊距离示意图
五、距离分辨率
由于雷达采用脉冲的收发时间测量进行测距、收发时间的标识可简化地认为是发射脉冲和接收脉冲的上升沿处,如图3所示,当两个目标相对雷达的距离太近时会导致回波脉冲重叠,无法在测量端将两个目标分离。
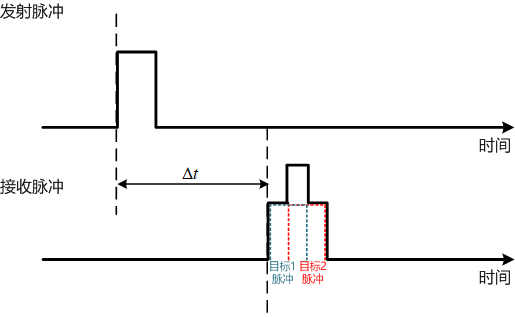
图3 测距不可分辨示意图
可将两个目标分离的目标相对雷达最小距离差称为雷达的距离分辨率。假设雷达系统在最小测距
和最大测距
之间工作。则可将雷达的测距范围划分为
个距离单元门,每个距离单元门的宽度为
,则距离单元门的个数为
。
从图3中可以看出,当两个目标的距离差所产生的回波脉冲时间差小于接收机处理的单个脉冲宽度时即会造成目标重叠,在经典雷达中,接收机处理的单个脉冲的宽度即等于发射脉冲的宽度
,此时有:
| (4) |
对于经典雷达信号,由矩形函数
与调制函数
相乘得到,其中为信号载频。根据傅里叶变化的原理,信号的频率表达即为:
| (5) |
为半功率带宽约为
的钟形函数,信号的频率表达式的意思即将钟形函数
保持形状不变、平移到中心频率为的位置处,其带宽
仍为
。因此对于经典雷达也有:
| (6) |
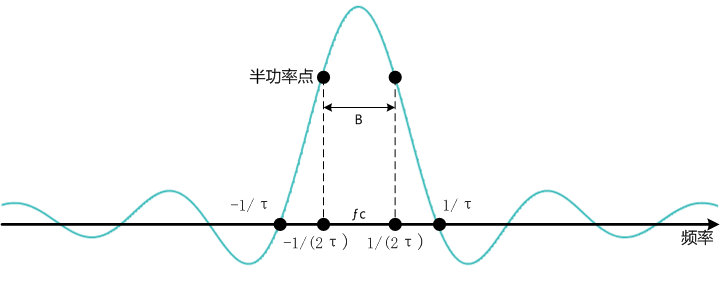
图4 经典雷达信号频谱图
雷达为了增加对相对距离近的目标的分辨能力,需要距离分辨率尽可能小。由公式(4)可得,经典雷达要减小
只能减少脉宽
。而由脉冲能量公式(2)可得,减小脉宽
在峰值功率不变的情况下将减小雷达发射脉冲的能量,这将影响雷达的最远探测能力。因此经典雷达围绕脉宽
的选择形成了关于距离分辨率和最远探测能力的矛盾点。雷达常采用线性调频信号代替经典雷达信号,利用脉冲压缩技术解决距离分辨率和最远探测能力的矛盾点。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









