






深度强化学习(Deep Reinforcement Learning, DRL)已成为解决复杂决策问题的主流方法。它通过结合深度学习和强化学习的优点,能够在没有明确监督信号的情况下,通过与环境的交互来学习最优策略。在深度强化学习的过程中,Q学习(Q-Learning)作为一种基础算法被广泛应用。然而,Q学习在深度学习中的实现往往会面临过估计现象的问题,这会导致训练的不稳定性和性能下降。为了解决这一问题,**Double DQN(DDQN)**算法应运而生,本文将深入探讨过估计现象的原因及Double DQN算法的解决方案,并附上Pytorch实现代码。
1. Q学习与过估计现象
Q学习概述
在强化学习中,Q学习是一种基于值函数的方法,它通过学习一个状态-动作值函数(Q函数)来评估每个动作在给定状态下的价值。在Q学习中,智能体的目标是通过最大化Q值来选择最优动作。Q学习的更新公式如下:

过估计现象
Q学习算法的核心在于通过更新Q值来评估每个动作的价值。然而,**深度Q网络(DQN)算法在实际应用中,往往会出现一种称为过估计现象(Overestimation Bias)**的问题。
什么是过估计现象?
过估计现象是指在Q值的更新过程中,由于在目标Q值计算时选择了最大Q值,导致某些Q值被高估。例如,当目标Q值计算时,选择了Q值较高的动作作为估计值,但实际上这些值并不一定是最优的。随着训练的进行,这种高估计的Q值会传递到更新过程中,导致整个Q网络的估计偏差。
过估计现象会导致:
- 策略更新不准确,进而影响智能体的学习过程。
- 强化学习的收敛速度变慢,甚至陷入局部最优解。
2. Double DQN算法的提出
Double DQN算法概述
为了减少过估计现象,**Double DQN(DDQN)**提出了一个改进方案。Double DQN的核心思想是使用两个Q网络:一个用于选择动作,另一个用于评估动作。通过这样的方法,DDQN能够减少对Q值的过度高估。
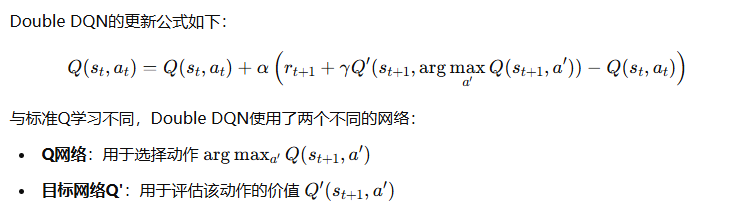
通过这种方式,Double DQN减少了在更新过程中对动作的高估计,从而有效缓解了过估计现象。
Double DQN的优势
- 减少过估计:通过分离选择动作和评估动作,DDQN能够避免Q值的过度高估,提升算法的稳定性。
- 提高学习效率:减少了不必要的估计偏差,能够加速智能体的收敛过程。
- 更好的稳定性:在复杂环境中,DDQN展现出比标准DQN更好的稳定性和收敛性。
3. Pytorch实现Double DQN
接下来,我们将使用Pytorch实现一个简单的Double DQN模型。以下代码展示了如何构建DDQN,并在一个基本的环境中进行训练。
3.1 构建Q网络与目标网络
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
# 定义Q网络
class QNetwork(nn.Module):
def __init__(self, input_size, output_size):
super(QNetwork, self).__init__()
self.fc1 = nn.Linear(input_size, 128)
self.fc2 = nn.Linear(128, 64)
self.fc3 = nn.Linear(64, output_size)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
return self.fc3(x)
# 创建Q网络和目标网络
q_network = QNetwork(input_size=4, output_size=2) # 假设状态空间维度为4,动作空间维度为2
target_network = QNetwork(input_size=4, output_size=2)
target_network.load_state_dict(q_network.state_dict())
target_network.eval()
# 定义优化器
optimizer = optim.Adam(q_network.parameters(), lr=0.001)
3.2 训练过程与Double DQN更新规则
def double_dqn_update(q_network, target_network, state, action, reward, next_state, done, gamma=0.99):
# 转换为Tensor
state = torch.tensor(state, dtype=torch.float32)
next_state = torch.tensor(next_state, dtype=torch.float32)
# 计算当前Q值
current_q = q_network(state)[action]
# 使用Q网络选择最大动作
next_action = torch.argmax(q_network(next_state)).item()
# 使用目标网络评估最大动作的Q值
next_q = target_network(next_state)[next_action]
# 计算目标Q值
target_q = reward + gamma * next_q * (1 - done)
# 计算损失
loss = nn.MSELoss()(current_q, target_q)
# 优化网络
optimizer.zero_grad()
loss.backward()
optimizer.step()
return loss.item()
3.3 训练过程
# 假设我们有一个训练循环
for episode in range(1000):
# 假设每个episode中,我们进行状态、动作选择、奖励获取、状态更新等
state, action, reward, next_state, done = get_training_data() # 获取训练数据
loss = double_dqn_update(q_network, target_network, state, action, reward, next_state, done)
# 每隔一定周期更新目标网络
if episode % 10 == 0:
target_network.load_state_dict(q_network.state_dict())
print(f"Episode {episode}, Loss: {loss}")
4. 总结
在深度强化学习的过程中,过估计现象是导致Q学习不稳定的一个主要原因。Double DQN通过引入两个Q网络来解决这一问题,显著提高了Q学习的稳定性和性能。本文详细介绍了Double DQN的工作原理,并提供了Pytorch实现代码,希望能为研究和实践中的深度强化学习问题提供帮助。
这篇博客深入探讨了过估计现象与Double DQN算法,并提供了如何在Pytorch中实现Double DQN的详细过程。希望对你理解和应用深度强化学习中的这些重要概念有所帮助!


















 5313
5313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











