







 本文介绍了台球瞄准方法的分析,包括假想球概念、sin函数近似法以及利用定位星估计角度。作者提出简化流程的新方法,旨在通过定位星直接得出瞄准比例,减少计算步骤,提升打球效率。文章还探讨了不同距离下的瞄准策略,并分享了个人的实战经验。
本文介绍了台球瞄准方法的分析,包括假想球概念、sin函数近似法以及利用定位星估计角度。作者提出简化流程的新方法,旨在通过定位星直接得出瞄准比例,减少计算步骤,提升打球效率。文章还探讨了不同距离下的瞄准策略,并分享了个人的实战经验。
免责声明:本人理工男一枚,球技刚入门,非圣贤之流,无大家之言。
一、缘起
这两天闲来无事,就和小伙伴们一起去台球厅浪了一波,颇有感触。遂兴起无尽兴趣,想要大展拳脚,可是又自惭于自己球技太菜,不堪入目,囚禁了我这放飞自我的潇洒。于是阅览群书想要探一探这究竟是怎么一个龙潭虎穴,怎的别人就可以一杆清台成就世间佳话,而我连传说中的感觉都寻不到呢!网络大法好啊,无数前人的经验,看的我是这般如痴如醉,不可自拔啊。
二、假想球
先从台球开山第一技假想球开始。球杆击中白球,刹那间产生一肉眼难及的速度使白球撞向目标球,经过一番花里胡哨的打斗,目标球落败遁向低袋洞中,暂避锋芒。众所周知,白球(母球)只有如下图所示与目标球展开厮杀,才能完虐对方使之心甘情愿下场。
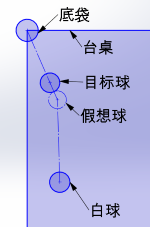
即想象一个假想球,将白球瞄向假想球球心射出,只要与目标球碰撞时,底袋中心和目标球球心和假想球球心在一条直线上就可以命中靶心,完美进球。即碰撞时要满足三点一线法则。且碰撞后白球会垂直于该直线行进以宣告主权,即90度法则。这样就会产生三条直线:1.白球瞄准假想球的直线,2.目标球行进路线,3.白球碰撞后行进路线。我们暂且抛开白球碰撞后行进的这条线不谈,先来看前两条线。
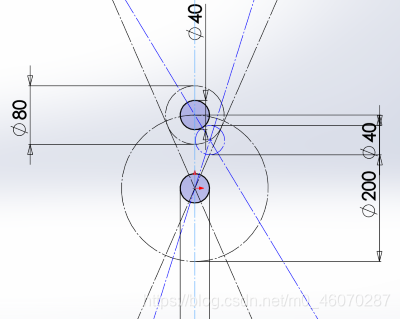
当两条线的夹角变化时,假想球围绕目标球旋转。如下所示:
图中
1.下边的球是球杆碰的球,上边的球即目标球。
2.旁边虚线的圆形即假想球。假想球围绕目标球旋转其运动轨迹就是上部较小的黑色虚线圆,其半径是台球半径的二倍。
台球瞄准时有一瞄准方法(找尾巴法)就是去想象这个圆。在瞄准时瞄准底袋与目标球所在直线与该圆的交点。该方法网上讲解的挺多,但对于我这样的新手而言,这个小尾巴(沿底袋和目标球所在直线向交点方向延长一个球矩)并不能想象出来,也就找不准交点,以弃暂此不表,如有兴趣可自行在网上搜索。
3.中间浅绿色线(中间竖直线)是母球于目标球球心所在直线,记做L1。底袋与目标球与假想球所在直线,记做L2。母球与假想球所在直线,记做L3。
4.L2与L1夹角记做∠a,L3与L1夹角记做∠b,L2与L3夹角记做∠c。
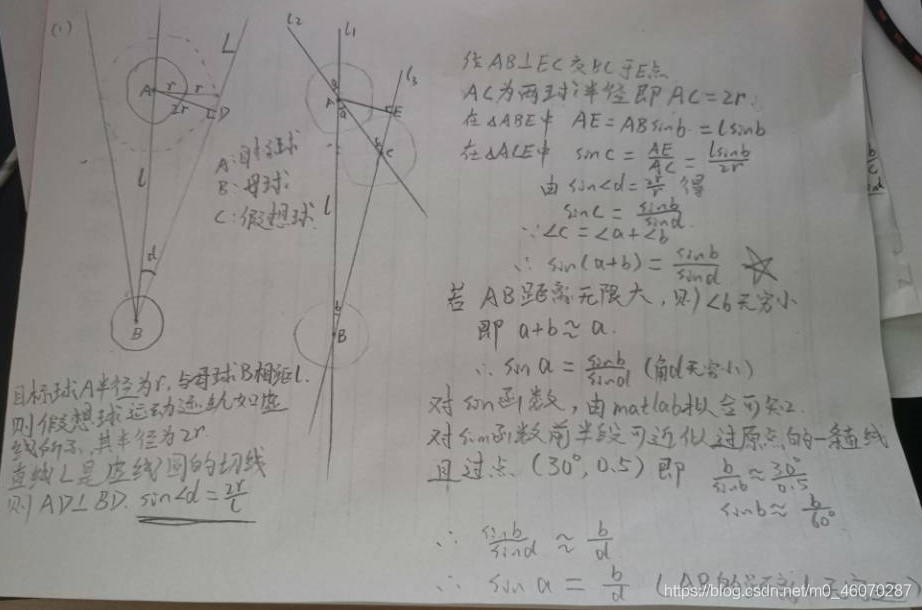
5.当∠a变化时,假想球围绕目标球旋转,∠b随之变化,但如视频所示,∠b只能在经母球圆心与假想球运动轨迹(虚线圆)的切线内变化,记∠b变化的最大值为∠d。
AwesomeScreenshot-2019-12-22-1577007945613
经推导可得到如下关系:sin(∠a+∠b)=sin(∠b)/sin(∠d)。sin(∠c)=sin(∠b)/sin(∠d)。
推导过程如图:
台球有另一个瞄准方法叫重合比例法。其公式是CA’ / CD = 2×sin(α)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 659
659

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









