






一、前言
协作机械臂,顾名思义,是适合与人类通力协作去解决实际问题的一类机械臂,作为机械臂家族的一员,与传统的工业机械臂相对应。工业机械臂经过多年的发展,在汽车、3C电子等工业自动化领域已经得到了广泛的落地与应用,而协作机械臂作为近几年来的新兴产物,在智能性、安全性与易用性上相较于工业机械臂都有很大的提升,这给协作机械臂在柔性制造、康复医疗、商业服务与家庭应用等新兴领域均带来了极大的落地潜力。
这篇文章,首先将通过硬件设计与运动控制这两个章节,简要地介绍如何去设计并控制一台协作机械臂,再通过现阶段落地应用的实际DEMO来给大家一个对协作机械臂形态、功能与特性的直观认识。
二、硬件设计
协作机械臂的整体硬件设计主要由伺服关节、连杆外壳、控制柜与示教器和末端执行器这四个部分组成,详细可见下图:
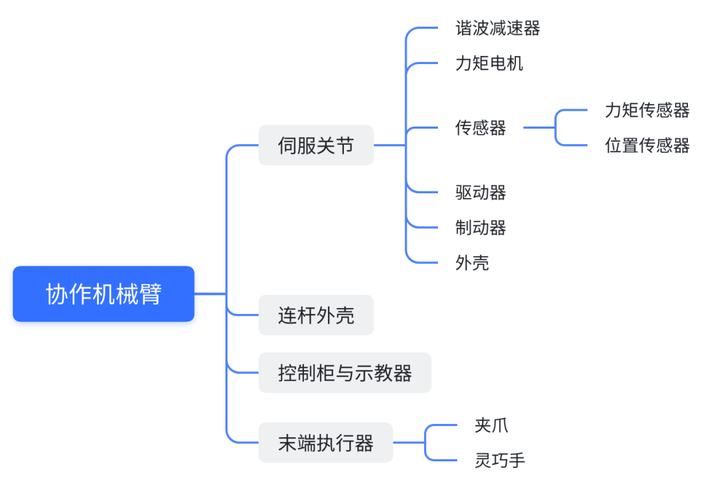
(1)伺服关节
伺服关节是协作机械臂最重要的组成单元,可以理解成整体机械臂的动力单元,一个完整的伺服关节一般由谐波减速器、力矩电机、传感器、驱动器、制动器与外壳这六部分组成,具体可参见下图:
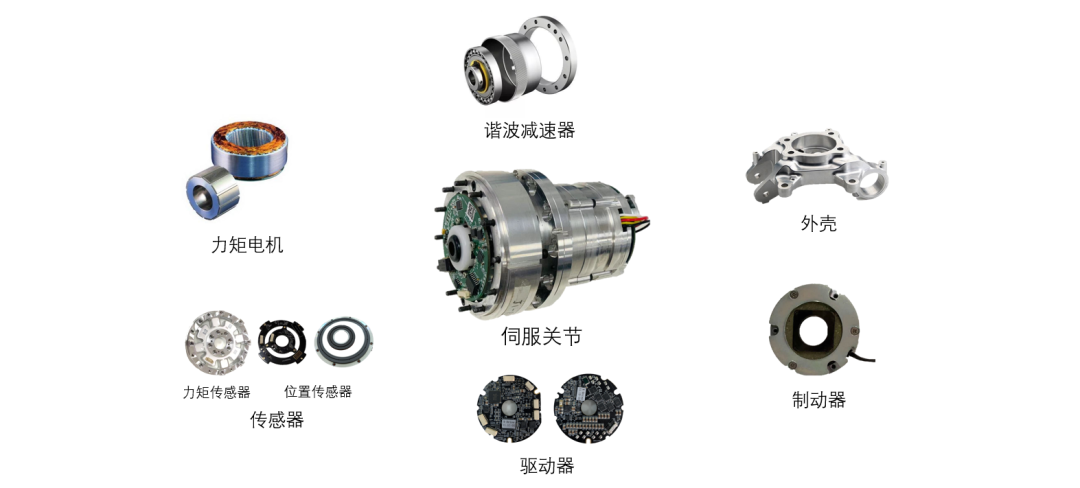
力矩电机是通过FOC矢量控制来输出所需求的转速和扭矩,再通过谐波减速器进行转速和扭矩关系的调制,一般在协作机器人中,是经谐波减速器把电机的高转速+低扭矩工况转化为实际使用需要的低转速+大扭矩的工况;FOC矢量控制的底层运算是经过集成嵌入式芯片的驱动器产生,驱动器作为伺服关节底层控制的“大脑”,还具备实时底层计算、输出三相驱动电流,AD/DA输入输出转化与通信协议解析等重要功能;同时为了确保伺服关节输出位置与力的精度,在具体的控制上我们一般要求做闭环,这就需要有位置传感器和力矩传感器将相应关节位置与关节力实时测量反馈至驱动器。
(2)连杆外壳
协作机械臂在上文提到的伺服关节的基础上,需要相应的连杆外壳将每个动力单元串联起来,以形成整体的动力传递与机体构型,这里提到的构型具体是指在空间中自由度的数目,一般协作机械臂都以6自由度或7自由度为主,构型上可以称作六轴机械臂或七轴机械臂。七轴机械臂因为存在一个多余空间本身6自由度的冗余自由度,因此在整体运动的灵活性与可达性上更有优势。

上图是一款经典协作机械臂的连杆外壳爆炸图,一般传递动力的元件(白色元件)是由铝合金制成,而作为检修开盖口或者装饰性的元件(灰色元件)由塑料制成,作为传递动力的元件在设计过程中需要做精密而详细的FEM分析,以确保在良好轻量化的基础上仍能保证较好的本体刚度,来提升整体机械臂运动的动态性能和末端的定位精度。
(3)控制柜与示教器
协作机械臂除机身本体外,一般在实际使用过程中我们还要搭配控制柜与示教器来进行操作使用,具体如下图所示。

控制柜类似于整体机器人上层控制的“大脑”,一般搭载一台工控机(NUC)去进行对算力要求较高的上层运算,相对应的就是上文伺服关节中提到的驱动器,因为尺寸和功率的限制,一般是处理较为底层的基本运算。另外,控制柜中还集成了相应的电源模块,用来将我们日常生活中提供的220V交流电转化为伺服关节所需的48V或24V直流电,同时还具备相应的电源安全模块来确保整体机械臂电气系统的EMC和抗ESD能力。
而示教器则类似于一款集成特定操作控制系统的平板,直接和用户进行交互,用户在没有PC的情况下也可以通过示教器直接对机械臂进行操作控制,一般示教器上都是提供高度封装的图形化编程界面以及设计良好的HMI,以提升用户使用机械臂的便利性。另一方面,在示教器上一般均会要求集成红色的急停按钮,在发生紧急情况的时刻进行最高优先级的急停制动,提升使用过程中的安全性。
(4)末端执行器
详情请参考古月居 - ROS机器人知识分享社区



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









