






一、示例代码
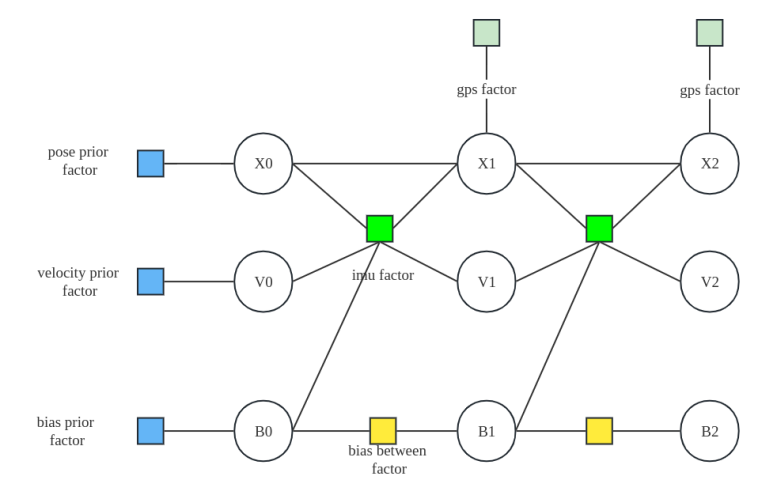
因子图结构如下:
/* ----------------------------------------------------------------------------
* GTSAM Copyright 2010, Georgia Tech Research Corporation,
* Atlanta, Georgia 30332-0415
* All Rights Reserved
* Authors: Frank Dellaert, et al. (see THANKS for the full author list)
* See LICENSE for the license information
* -------------------------------------------------------------------------- */
/**
* @file ImuFactorsExample
* @brief Test example for using GTSAM ImuFactor and ImuCombinedFactor
* navigation code.
* @author Garrett (ghemann@gmail.com), Luca Carlone
*/
/**
* @file ImuFactorsExample
* @brief 使用 GTSAM 的 ImuFactor 和 ImuCombinedFactor 进行导航测试示例(结合 GPS 数据进行测试)
* @author Garrett (ghemann@gmail.com), Luca Carlone
*/
/**
* Example of use of the imuFactors (imuFactor and combinedImuFactor) in
* conjunction with GPS
* - imuFactor is used by default. You can test combinedImuFactor by
* appending a `-c` flag at the end (see below for example command).
* - we read IMU and GPS data from a CSV file, with the following format:
* A row starting with "i" is the first initial position formatted with
* E, N, U, qx, qY, qZ, qW, velE, velN, velU
* A row starting with "0" is an imu measurement
* (body frame - Forward, Left, Up)
* linAccX, linAccY, linAccZ, angVelX, angVelY, angVelX
* A row starting with "1" is a gps correction formatted with
* E, N, U, qX, qY, qZ, qW
* Note that for GPS correction, we're only using the position not the
* rotation. The rotation is provided in the file for ground truth comparison.
*
* See usage: ./ImuFactorsExample --help
*/
/**
* 示例说明如何结合使用 IMU 因子(imuFactor 和 combinedImuFactor)与 GPS 测量:
* - 默认使用 imuFactor;你可以在命令行末尾添加 “-c” 参数测试 combinedImuFactor(参见下方示例命令)
* - 从 CSV 文件中读取 IMU 和 GPS 数据,文件格式如下:
* * 以 "i" 开头的一行表示初始位置,格式为:
* E, N, U, qx, qY, qZ, qW, velE, velN, velU
* * 以 "0" 开头的一行表示 IMU 测量(传感器坐标系下,顺序为:前、左、上):
* linAccX, linAccY, linAccZ, angVelX, angVelY, angVelZ
* * 以 "1" 开头的一行表示 GPS 校正,格式为:
* E, N, U, qX, qY, qZ, qW
* 注意:对于 GPS 校正,仅使用位置信息而非旋转;文件中提供旋转仅用于与地面真值进行对比。
*
* 用法示例: ./ImuFactorsExample --help
*/
#include <boost/program_options.hpp>
// GTSAM related includes.
#include <gtsam/inference/Symbol.h>
#include <gtsam/navigation/GPSFactor.h>
#include <gtsam/navigation/ImuFactor.h> // Imu因子:ImuFactor,对应预积分的类 PreintegratedImuMeasurements
#include <gtsam/navigation/CombinedImuFactor.h> // Imu因子:CombinedImuFactor,对应预积分的类 PreintegratedCombinedMeasurements
#include <gtsam/slam/BetweenFactor.h>
#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
#include <gtsam/nonlinear/ISAM2.h>
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
// #include <gtsam/slam/dataset.h>
#include <cstring>
#include <fstream>
#include <iostream>
// using namespace gtsam;
// using namespace std;
using gtsam::symbol_shorthand::B; // Bias (ax,ay,az,gx,gy,gz)
using gtsam::symbol_shorthand::V; // Vel (xdot,ydot,zdot)
using gtsam::symbol_shorthand::X; // Pose3 (x,y,z,r,p,y)
namespace po = boost::program_options;
/*
解析命令行参数
-h [ --help ]
显示帮助信息,列出所有可用的命令行选项。
--data_csv_path arg (=imuAndGPSdata.csv)
指定包含IMU数据(以及GPS数据)的CSV文件的路径。如果不指定,则默认使用 imuAndGPSdata.csv 文件。
--output_filename arg (=imuFactorExampleResults.csv)
指定输出结果文件的路径和文件名。默认输出为 imuFactorExampleResults.csv。
--use_isam
如果加上该选项,则程序使用ISAM作为优化器进行求解,否则可能使用其它默认的优化方法。
*/
po::variables_map parseOptions(int argc, char* argv[]) {
po::options_description desc;
desc.add_options()("help,h", "produce help message")(
"data_csv_path", po::value<std::string>()->default_value("/home/wu/fast_slam/liosam_ws/src/gtsam_example_pkg/src/Data/imuAndGPSdata.csv"),
"path to the CSV file with the IMU data")(
"output_filename",
po::value<std::string>()->default_value("/home/wu/fast_slam/liosam_ws/src/gtsam_example_pkg/src/Data/imuFactorExampleResults.csv"),
"path to the result file to use")("use_isam", po::bool_switch(),
"use ISAM as the optimizer");
po::variables_map vm;
po::store(po::parse_command_line(argc, argv, desc), vm);
if (vm.count("help")) {
std::cout << desc << "\n";
exit(1);
}
return vm;
}
// Imu因子:ImuFactor,对应预积分的类 PreintegratedImuMeasurements
boost::shared_ptr<gtsam::PreintegratedImuMeasurements::Params> ImuFactor_imuParams() {
// We use the sensor specs to build the noise model for the IMU factor.
double accel_noise_sigma = 0.0003924; // 加速度计噪声标准差
double gyro_noise_sigma = 0.000205689024915; // 陀螺仪噪声标准差
// 计算各个协方差矩阵(均为单位矩阵乘以标准差平方)
gtsam::Matrix33 measured_acc_cov = gtsam::I_3x3 * pow(accel_noise_sigma, 2);
gtsam::Matrix33 measured_omega_cov = gtsam::I_3x3 * pow(gyro_noise_sigma, 2);
gtsam::Matrix33 integration_error_cov = gtsam::I_3x3 * 1e-8; // error committed in integrating position from velocities // 连续时间下描述积分不确定性的协方差矩阵
// MakeSharedU 表示z轴指向天;MakeSharedD 表示z轴指向地
// auto p = gtsam::PreintegrationParams::MakeSharedU(0.0); // 与下一行代码等效
auto p = gtsam::PreintegratedImuMeasurements::Params::MakeSharedD(0.0);
// PreintegrationBase params:
p->accelerometerCovariance = measured_acc_cov; // acc white noise in continuous
p->integrationCovariance = integration_error_cov; // integration uncertainty continuous
// should be using 2nd order integration
// PreintegratedRotation params:
p->gyroscopeCovariance = measured_omega_cov; // gyro white noise in continuous
return p;
}
// Imu因子:CombinedImuFactor,对应预积分的类 PreintegratedCombinedMeasurements
boost::shared_ptr<gtsam::PreintegratedCombinedMeasurements::Params> CombinedImuFactor_imuParams() {
// We use the sensor specs to build the noise model for the IMU factor.
double accel_noise_sigma = 0.0003924; // 加速度计噪声标准差
double gyro_noise_sigma = 0.000205689024915; // 陀螺仪噪声标准差
double accel_bias_rw_sigma = 0.004905; // 加速度计偏置随机游走标准差
double gyro_bias_rw_sigma = 0.000001454441043; // 陀螺仪偏置随机游走标准差
// 计算各个协方差矩阵(均为单位矩阵乘以标准差平方)
gtsam::Matrix33 measured_acc_cov = gtsam::I_3x3 * pow(accel_noise_sigma, 2);
gtsam::Matrix33 measured_omega_cov = gtsam::I_3x3 * pow(gyro_noise_sigma, 2);
gtsam::Matrix33 integration_error_cov = gtsam::I_3x3 * 1e-8; // error committed in integrating position from velocities // 连续时间下描述积分不确定性的协方差矩阵
gtsam::Matrix33 bias_acc_cov = gtsam::I_3x3 * pow(accel_bias_rw_sigma, 2);
gtsam::Matrix33 bias_omega_cov = gtsam::I_3x3 * pow(gyro_bias_rw_sigma, 2);
gtsam::Matrix66 bias_acc_omega_init = gtsam::I_6x6 * 1e-5; // error in the bias used for preintegration // 初始偏置估计的协方差矩阵
// MakeSharedU 表示z轴指向天;MakeSharedD 表示z轴指向地
// auto p = gtsam::PreintegrationCombinedParams::MakeSharedU(0.0); // 与下一行代码等效
auto p = gtsam::PreintegratedCombinedMeasurements::Params::MakeSharedD(0.0);
// PreintegrationBase params:
p->accelerometerCovariance = measured_acc_cov; // acc white noise in continuous
p->integrationCovariance = integration_error_cov; // integration uncertainty continuous
// should be using 2nd order integration
// PreintegratedRotation params:
p->gyroscopeCovariance = measured_omega_cov; // gyro white noise in continuous
// PreintegrationCombinedMeasurements params:
p->biasAccCovariance = bias_acc_cov; // acc bias in continuous
p->biasOmegaCovariance = bias_omega_cov; // gyro bias in continuous
p->biasAccOmegaInt = bias_acc_omega_init;
return p;
}
int main(int argc, char* argv[]) {
std::string data_filename, output_filename;
bool use_isam = false;
po::variables_map var_map = parseOptions(argc, argv);
data_filename = var_map["data_csv_path"].as<std::string>();
output_filename = var_map["output_filename"].as<std::string>();
std::cout << "data_filename: " << data_filename << "\n\n";
std::cout << "output_filename: " << output_filename << "\n\n";
use_isam = var_map["use_isam"].as<bool>();
// GTSAM:创建空的GTSAM优化器,添加优化器参数(使用ISAM2优化器)
gtsam::ISAM2* isam2 = 0;
if (use_isam) {
printf("Using ISAM2\n");
gtsam::ISAM2Params parameters;
parameters.relinearizeThreshold = 0.01;
parameters.relinearizeSkip = 1;
isam2 = new gtsam::ISAM2(parameters);
} else {
printf("Using Levenberg Marquardt Optimizer\n");
}
// Set up output file for plotting errors
// 设置输出文件,用于记录误差等统计数据
FILE* fp_out = fopen(output_filename.c_str(), "w+");
fprintf(fp_out,
"#time(s),x(m),y(m),z(m),qx,qy,qz,qw,gt_x(m),gt_y(m),gt_z(m),gt_qx,"
"gt_qy,gt_qz,gt_qw\n");
// Begin parsing the CSV file. Input the first line for initialization.
// From there, we'll iterate through the file and we'll preintegrate the IMU
// or add in the GPS given the input.
std::ifstream file(data_filename.c_str());
std::string value;
// Format is (E,N,U,qX,qY,qZ,qW,velE,velN,velU)
gtsam::Vector10 initial_state; // 初始状态: E, N, U, qx, qY, qZ, qW, velE, velN, velU 东北天
getline(file, value, ','); // 以 "i" 开头的一行
for (int i = 0; i < 9; i++) {
getline(file, value, ',');
initial_state(i) = std::stof(value.c_str());
}
getline(file, value, '\n');
initial_state(9) = std::stof(value.c_str());
std::cout << "initial state:\n" << initial_state.transpose() << "\n\n"; // 初始状态: E, N, U, qx, qY, qZ, qW, velE, velN, velU 东北天
// Assemble initial quaternion through GTSAM constructor
// ::quaternion(w,x,y,z);
gtsam::Rot3 prior_rotation = gtsam::Rot3::Quaternion(initial_state(6), initial_state(3), initial_state(4), initial_state(5));
gtsam::Point3 prior_point(initial_state.head<3>());
gtsam::Pose3 prior_pose(prior_rotation, prior_point); // 位姿 X
gtsam::Vector3 prior_velocity(initial_state.tail<3>()); // 速度 V
gtsam::imuBias::ConstantBias prior_imu_bias; // 偏置 B,默认全为 0。假设初始偏置为零 // assume zero initial bias
// GTSAM:构造初始值对象,插入初始位姿、速度、偏置
gtsam::Values initial_values;
int key_GPS = 0; // key,以 GPS 帧为关键帧
initial_values.insert(X(key_GPS), prior_pose);
initial_values.insert(V(key_GPS), prior_velocity);
initial_values.insert(B(key_GPS), prior_imu_bias);
// Assemble prior noise model and add it the graph.`
// GTSAM:构造初始值先验噪声模型(位姿、速度、偏置)
auto pose_noise_model = gtsam::noiseModel::Diagonal::Sigmas((gtsam::Vector(6) << 0.01, 0.01, 0.01, 0.5, 0.5, 0.5).finished()); // rad,rad,rad,m, m, m
auto velocity_noise_model = gtsam::noiseModel::Isotropic::Sigma(3, 0.1); // m/s
auto bias_noise_model = gtsam::noiseModel::Isotropic::Sigma(6, 1e-3);
// Add all prior factors (pose, velocity, bias) to the graph.
// GTSAM:创建空的因子图,并添加所有先验因子
gtsam::NonlinearFactorGraph* graph = new gtsam::NonlinearFactorGraph();
graph->addPrior(X(key_GPS), prior_pose, pose_noise_model);
graph->addPrior(V(key_GPS), prior_velocity, velocity_noise_model);
graph->addPrior(B(key_GPS), prior_imu_bias, bias_noise_model);
// GTSAM:创建 IMU 预积分参数
auto p = ImuFactor_imuParams(); // Imu因子:ImuFactor
// auto p = CombinedImuFactor_imuParams(); // Imu因子:CombinedImuFactor
// GTSAM:创建预积分器对象,类型为 PreintegratedImuMeasurements。传入 IMU预积分参数 和 当前偏置的估计值(全为0)
std::shared_ptr<gtsam::PreintegrationType> preintegrated = std::make_shared<gtsam::PreintegratedImuMeasurements>(p, prior_imu_bias);
assert(preintegrated);
// Store previous state for imu integration and latest predicted outcome.
// GTSAM:设置前一关键帧的状态和偏置,用于后续 IMU 预积分预测,即调用 predict(前一关键帧状态, 前一关键帧偏置) 函数
gtsam::NavState prev_state(prior_pose, prior_velocity);
gtsam::imuBias::ConstantBias prev_bias = prior_imu_bias;
// GTSAM:初始化当前关键帧状态
gtsam::NavState prop_state = prev_state;
// Keep track of total error over the entire run as simple performance metric.
// 记录每次优化完成后的误差(仅作为性能指标)
double current_position_error = 0.0, current_orientation_error = 0.0;
double output_time = 0.0;
double dt = 0.005; // The real system has noise, but here, results are nearly
// exactly the same, so keeping this for simplicity.
// All priors have been set up, now iterate through the data file.
// 依次读取 CSV 文件中的数据
while (file.good()) {
// Parse out first value
getline(file, value, ',');
int type = std::stoi(value.c_str());
if (type == 0) { // IMU 测量(传感器坐标系下,顺序为:前、左、上):linAccX, linAccY, linAccZ, angVelX, angVelY, angVelZ
// GTSAM:IMU 数据到达时处理
gtsam::Vector6 imu;
for (int i = 0; i < 5; ++i) {
getline(file, value, ',');
imu(i) = std::stof(value.c_str());
}
getline(file, value, '\n');
imu(5) = std::stof(value.c_str());
// Adding the IMU preintegration.
// GTSAM:IMU 数据到达时处理,将读取的 IMU 测量添加到预积分器对象中:
preintegrated->integrateMeasurement(imu.head<3>(), imu.tail<3>(), dt);
// cout << "imu" << imu.transpose() << "\n";
} else if (type == 1) { // GPS 校正,格式为:E, N, U, qX, qY, qZ, qW
// GTSAM:GPS 数据到达时处理,构建因子图,进行优化
gtsam::Vector7 gps;
for (int i = 0; i < 6; ++i) {
getline(file, value, ',');
gps(i) = std::stof(value.c_str());
}
getline(file, value, '\n');
gps(6) = std::stof(value.c_str());
key_GPS++;
// Adding IMU factor and GPS factor and optimizing.
// 1. GTSAM:添加 IMU 因子,将前一状态与当前状态连接:
// 前一状态到当前状态的所有预积分测量值。(通过 dynamic_cast 将 gtsam::PreintegrationType 强制转换为 gtsam::PreintegratedImuMeasurements)
auto preint_imu = dynamic_cast<const gtsam::PreintegratedImuMeasurements&>(*preintegrated);
gtsam::ImuFactor imu_factor(X(key_GPS - 1), V(key_GPS - 1),
X(key_GPS), V(key_GPS),
B(key_GPS - 1), preint_imu);
graph->add(imu_factor);
// 2. GTSAM:添加偏置随机游走因子,假设偏置没有变化
gtsam::imuBias::ConstantBias zero_bias(gtsam::Vector3(0, 0, 0), gtsam::Vector3(0, 0, 0));
// graph->add(gtsam::BetweenFactor<gtsam::imuBias::ConstantBias>(
// B(key_GPS - 1), B(key_GPS), zero_bias,
// bias_noise_model));
gtsam::BetweenFactor<gtsam::imuBias::ConstantBias> bias_Factor(B(key_GPS - 1), B(key_GPS),
zero_bias,
bias_noise_model);
graph->add(bias_Factor);
// 3. GTSAM:添加 GPS 校正因子:GPSFactor 仅约束位置,不约束旋转
auto correction_noise = gtsam::noiseModel::Isotropic::Sigma(3, 1.0);
gtsam::GPSFactor gps_factor(X(key_GPS),
gtsam::Point3(gps(0), // E,
gps(1), // N,
gps(2)), // U,
correction_noise);
graph->add(gps_factor);
// Now optimize and compare results.
// 4. GTSAM:利用Imu预积分器预测当前状态:
prop_state = preintegrated->predict(prev_state, prev_bias);
// 5. GTSAM:将预积分预测得到的当前状态,作为因子图中当前状态的初始值
// 前一时刻状态的初始值使用存储在 isam2 中的上一次优化的结果,不用重新添加
initial_values.insert(X(key_GPS), prop_state.pose());
initial_values.insert(V(key_GPS), prop_state.v());
initial_values.insert(B(key_GPS), prev_bias);
gtsam::Values result;
// 根据是否使用 ISAM2 选择不同优化器
if (use_isam) {
// 6. GTSAM:ISAM2 增量优化
// 在一些早期版本的 ISAM2 实现中,开发者发现分两步更新能够更好地控制系统的稳定性和精度。因此,有时用户会习惯性地先将新数据输入,再调用一次空的 update() 来“刷新”整个系统。
isam2->update(*graph, initial_values); /* 将当前批次的新添加的因子(存储在 graph 中)和新变量的初始猜测(initial_values)添加到 ISAM2 的内部因子图中,执行增量优化
* 新变量的初始猜测(initial_values):必须包含 newFactors 中所有新变量,不得包含已有变量。*/
isam2->update(); // 再次执行增量优化
result = isam2->calculateEstimate(); // 获取优化结果
// reset the graph
// 7. GTSAM:清空因子图和初始估计,为下一次优化做准备
graph->resize(0);
initial_values.clear();
} else {
gtsam::LevenbergMarquardtOptimizer optimizer(*graph, initial_values);
result = optimizer.optimize();
}
// Overwrite the beginning of the preintegration for the next step.
// 8. GTSAM:更新上一时刻状态和偏置,将优化后的最新状态作为下一段预积分的初始值
prev_state = gtsam::NavState(result.at<gtsam::Pose3>(X(key_GPS)), result.at<gtsam::Vector3>(V(key_GPS)));
prev_bias = result.at<gtsam::imuBias::ConstantBias>(B(key_GPS));
// Reset the preintegration object.
// 9. GTSAM:重置预积分器,并设置新的偏置为优化后的最新偏执
preintegrated->resetIntegrationAndSetBias(prev_bias);
// Print out the position and orientation error for comparison.
// 计算当前位置误差:比较预测位姿与 GPS 测量得到的位置信息
gtsam::Vector3 gtsam_position = prev_state.pose().translation();
gtsam::Vector3 position_error = gtsam_position - gps.head<3>();
current_position_error = position_error.norm();
// 计算当前姿态误差:利用四元数表示并求误差的欧拉角量级
gtsam::Quaternion gtsam_quat = prev_state.pose().rotation().toQuaternion();
gtsam::Quaternion gps_quat(gps(6), gps(3), gps(4), gps(5));
gtsam::Quaternion quat_error = gtsam_quat * gps_quat.inverse();
quat_error.normalize();
gtsam::Vector3 euler_angle_error(quat_error.x() * 2, quat_error.y() * 2,
quat_error.z() * 2);
current_orientation_error = euler_angle_error.norm();
// display statistics
// 显示当前位置和姿态误差
std::cout << "--------------------------------------------------------------------------"<< std::endl;
// cout << "gtsam_position: " << gtsam_position.transpose() << " gtsam_quat: " << gtsam_quat.x() << " " << gtsam_quat.y() << " " << gtsam_quat.z()<< " " << gtsam_quat.w() << "\n";
std::cout << "Position error:" << current_position_error << "\t "
<< "Angular error:" << current_orientation_error << "\n";
// 将当前时间、状态和 GPS 真值写入输出文件
fprintf(fp_out, "%f,%f,%f,%f,%f,%f,%f,%f,%f,%f,%f,%f,%f,%f,%f\n",
output_time, gtsam_position(0), gtsam_position(1),
gtsam_position(2), gtsam_quat.x(), gtsam_quat.y(), gtsam_quat.z(),
gtsam_quat.w(), gps(0), gps(1), gps(2), gps_quat.x(),
gps_quat.y(), gps_quat.z(), gps_quat.w());
output_time += 1.0;
} else if (type == 555){ // 555为结束标志
std::cerr << "ERROR parsing file\n";
break;
}
}
fclose(fp_out);
std::cout << "Complete, results written to " << output_filename << "\n\n";
return 0;
}
二、重要代码源码
1. 预积分器对象 (PreintegratedImuMeasurements)
std::shared_ptr<gtsam::PreintegrationType> preintegrated =
std::make_shared<gtsam::PreintegratedImuMeasurements>(p, prior_imu_bias);源码:
/**
* 构造函数:初始化该类(不包含任何测量数据)
* @param p 参数,一般在同一应用中保持固定
* @param biasHat 当前加速度和角速度偏置的估计值
*/
PreintegratedImuMeasurements(const boost::shared_ptr<PreintegrationParams>& p,
const imuBias::ConstantBias& biasHat = imuBias::ConstantBias()) :
PreintegrationType(p, biasHat) {
preintMeasCov_.setZero();
}
2. 将 IMU 测量值 (integrateMeasurement)添加到预积分器对象中
调用该函数,GTSAM 内部会完成 链接中的6 预积分流程 中的第 1 步到第 4 步
preintegrated->integrateMeasurement(imu.head<3>(), imu.tail<3>(), dt);源码:
/**
* 将一条单独的 IMU 测量添加到预积分中。
* 加速度计和陀螺仪的测量均被视为传感器坐标系下的数据,
* 转换到机体坐标系的操作由 PreintegrationParams 中的 `body_P_sensor` 处理。
*
* @param measuredAcc 传感器提供的测量加速度
* @param measuredOmega 传感器提供的测量角速度
* @param dt 此次测量与上一次 IMU 测量之间的时间间隔
*/
void integrateMeasurement(const Vector3& measuredAcc,
const Vector3& measuredOmega, const double dt) override;
3. IMU 因子
auto preint_imu = dynamic_cast<const gtsam::PreintegratedImuMeasurements&>(*preintegrated);
gtsam::ImuFactor imu_factor(X(key_GPS - 1), V(key_GPS - 1),
X(key_GPS), V(key_GPS),
B(key_GPS - 1), preint_imu);源码:
/**
* ImuFactor 构造函数
* @param pose_i 前一时刻位姿的变量 Key
* @param vel_i 前一时刻速度的变量 Key
* @param pose_j 当前时刻位姿的变量 Key
* @param vel_j 当前时刻速度的变量 Key
* @param bias 前一时刻 IMU 偏置的变量 Key
* @param preintegratedMeasurements 前一状态到当前状态的所有预积分测量值
*/
ImuFactor(Key pose_i, Key vel_i, Key pose_j, Key vel_j, Key bias,
const PreintegratedImuMeasurements& preintegratedMeasurements);
4. 利用 IMU 预积分器预测当前状态
调用该函数,GTSAM 内部会完成 链接中的6 预积分流程 中的第 5 步
prop_state = preintegrated->predict(prev_state, prev_bias);源码:
/// IMU 预积分,根据 i 时刻状态预测时刻 j 的状态
/// @param state_i i 时刻的状态(包含位姿和速度)
/// @param bias_i i 时刻的 IMU 偏置
/// @param H1 (可选)关于输入 state_i 的雅可比矩阵,尺寸为 9×9
/// @param H2 (可选)关于输入 bias_i 的雅可比矩阵,尺寸为 9×6
/// @return 预测得到的 j 时刻的状态
NavState predict(const NavState& state_i, const imuBias::ConstantBias& bias_i,
OptionalJacobian<9, 9> H1 = boost::none,
OptionalJacobian<9, 6> H2 = boost::none) const;
5. ISAM2 类的成员函数
5.1 update()
isam2->update(*graph, initial_values);
isam2->update();源码:两次均调用了下面的成员函数。注意:下面的成员函数的每一个形参均有默认值。
/**
* 添加新因子,更新解并根据需要进行重线性化。
*
* 可选:此函数可以从系统中移除现有因子,从而实现例如用新因子替换已有因子的行为。
*
* 向当前系统中添加新的测量数据,并可选地添加新变量。
* 此操作执行 ISAM2 算法的完整步骤,根据 wildfire 阈值和重线性化阈值,
* 对系统进行重线性化并更新解。
*
* @param newFactors 要添加到系统中的新因子
* @param newTheta 新变量的初始猜测。必须包含 newFactors 中所有未在系统中出现的新变量,
* 且不能包含不在 newFactors 中的变量;此外,已存在于系统中的变量也不应包含在内。
* @param removeFactorIndices 要从系统中移除的因子索引
* @param force_relinearize 如果设为 true,则对所有线性增量足够大的变量(超过 Params::relinearizeThreshold)
* 强制进行重线性化,而不考虑重线性化间隔 Params::relinearizeSkip。
* @param constrainedKeys 可选:一个键到组标签的映射,使得某个变量可以被限制在 BayesTree 的特定分组中。
* @param noRelinKeys 可选:一组非线性变量的键,ISAM2 将保持这些变量的线性化点不变,
* 无论其线性增量大小如何。
* @param extraReelimKeys 可选:一组非线性变量的键,ISAM2 将无论线性增量大小如何都重新消元,
* 允许这些键被重新排序。
* @return 返回一个 ISAM2Result 结构体,其中包含此次更新的详细信息。
*/
virtual ISAM2Result update(
const NonlinearFactorGraph& newFactors = NonlinearFactorGraph(),
const Values& newTheta = Values(),
const FactorIndices& removeFactorIndices = FactorIndices(),
const boost::optional<FastMap<Key, int> >& constrainedKeys = boost::none,
const boost::optional<FastList<Key> >& noRelinKeys = boost::none,
const boost::optional<FastList<Key> >& extraReelimKeys = boost::none,
bool force_relinearize = false);
5.2 calculateEstimate()
result = isam2->calculateEstimate();源码:
/**
* 利用上一次 update() 过程中计算得到的不完整线性增量,计算出一个整体的估计值。
* 注意:由于该增量未更新到低于 wildfire_threshold,因此是不完整的。
* 如果只需要计算单个变量的估计,调用 calculateEstimate(const KEY&) 会更快。
*/
Values calculateEstimate() const;
/**
* 针对单个变量,利用上一次 update() 过程中计算得到的不完整线性增量计算该变量的估计值。
* 这种方法比调用无参版本的 calculateEstimate() 更快(后者对所有变量进行计算)。
* @param key 要计算估计值的变量的键
* @return 该变量的估计值
*/
template <class VALUE>
VALUE calculateEstimate(Key key) const {
// 取得上一次 update() 中存储的线性增量(delta),然后利用 Retract 操作,
// 将当前线性化点 theta_ 中对应变量的估计值向量按照增量 delta 进行修正,
// 得到该变量的当前估计值。
const Vector& delta = getDelta()[key];
return traits<VALUE>::Retract(theta_.at<VALUE>(key), delta);
}
5.3 边缘化
源码:
在路径 gtsam_unstable/nonlinear/IncrementalFixedLagSmoother.h 中:
/**
* 对 leafKeys 中列出的变量进行边缘化。这些键必须是 BayesTree 中的叶节点。
* 如果请求边缘化非叶节点,则抛出 MarginalizeNonleafException。
*
* 边缘化操作会在系统中留下该边缘的线性近似,
* 同时所有参与该线性边缘的变量的线性化点都会被固定。
* 固定变量集合将包含所有与原因子中边缘化变量有关的键,
* 以及由于填充效应可能额外产生的其他键。
*
* 如果提供了 'marginalFactorsIndices' 参数,
* 在调用 'marginalizeLeaves' 过程中,新添加的边缘因子对应的因子图索引会被追加到其中。
*
* 如果提供了 'deletedFactorsIndices' 参数,
* 在调用 'marginalizeLeaves' 过程中,被移除的因子对应的因子图索引会被追加到其中。
*/
void marginalizeLeaves(
const FastList<Key>& leafKeys,
boost::optional<FactorIndices&> marginalFactorsIndices = boost::none,
boost::optional<FactorIndices&> deletedFactorsIndices = boost::none);
/** 返回指定变量的边缘协方差矩阵 */
Matrix marginalCovariance(Key key) const;
在路径 gtsam/nonlinear/Marginals.h 中:
/** 计算单个变量的边缘信息矩阵。
* 使用 LLt(const Matrix&) 或 RtR(const Matrix&) 获取平方根信息矩阵。
* LLt 即为 LL^T, L为下三角矩阵。RtR 即为 R^TR, R为上三角矩阵。
*/
Matrix marginalInformation(Key variable) const;
/** 计算单个变量的边缘协方差矩阵。 */
Matrix marginalCovariance(Key variable) const;
经过验证,Marginals.h 中的 marginalCovariance(key).inverse() 和marginalInformation(key) 相等。
Marginals marginals(graph, result);
cout << "x1 covariance:\n" << marginals.marginalCovariance(1) << endl;
cout << "x2 covariance:\n" << marginals.marginalCovariance(2) << endl;
cout << "x3 covariance:\n" << marginals.marginalCovariance(3) << endl;
// marginals.marginalCovariance(key).inverse() 和 marginals.marginalInformation(key) 相等
cout << "x1 covariance^-1:\n" << marginals.marginalCovariance(1).inverse() << endl;
cout << "x2 covariance^-1:\n" << marginals.marginalCovariance(2).inverse() << endl;
cout << "x3 covariance^-1:\n" << marginals.marginalCovariance(3).inverse() << endl;
cout << "x1 information:\n" << marginals.marginalInformation(1) << endl;
cout << "x2 information:\n" << marginals.marginalInformation(2) << endl;
cout << "x3 information:\n" << marginals.marginalInformation(3) << endl;x1 covariance:
0.00828571429 7.82228372e-14 -2.06607043e-13
7.82228372e-14 0.00944444444 -0.00305555556
-2.06607043e-13 -0.00305555556 0.00819444445
x2 covariance:
0.00714285714 3.80266543e-14 -5.38289642e-14
3.80266543e-14 0.00777777778 -0.00111111111
-5.38289642e-14 -0.00111111111 0.00819444444
x3 covariance:
0.00828571429 6.60868131e-14 1.73935528e-13
6.60868131e-14 0.00944444444 0.00305555556
1.73935528e-13 0.00305555556 0.0181944444
x1 covariance^-1:
120.689655 -1.71902606e-11 3.03654593e-09
-1.71902606e-11 120.408163 44.8979592
3.03654593e-09 44.8979592 138.77551
x2 covariance^-1:
140 -5.64026054e-10 8.43176059e-10
-5.64026054e-10 131.111111 17.7777778
8.43176059e-10 17.7777778 124.444444
x3 covariance^-1:
120.689655 -4.98313237e-10 -1.07008462e-09
-4.98313237e-10 111.965812 -18.8034188
-1.07008462e-09 -18.8034188 58.1196581
x1 information:
120.689655 -1.71902606e-11 3.03654593e-09
-1.71902606e-11 120.408163 44.8979592
3.03654593e-09 44.8979592 138.77551
x2 information:
140 -5.64026054e-10 8.43176059e-10
-5.64026054e-10 131.111111 17.7777778
8.43176059e-10 17.7777778 124.444444
x3 information:
120.689655 -4.98313237e-10 -1.07008462e-09
-4.98313237e-10 111.965812 -18.8034188
-1.07008462e-09 -18.8034188 58.1196581 这里的 信息矩阵,应该对应于下式中的 ,协方差矩阵对应其逆
。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









