







 超级会员免费看
超级会员免费看
前言
本篇文章将带大家学习STM32智能小车的循迹功能。
一、红外循迹模块工作原理及接线图
红外循迹模块工作原理
电路工作描述
以其中一路为例
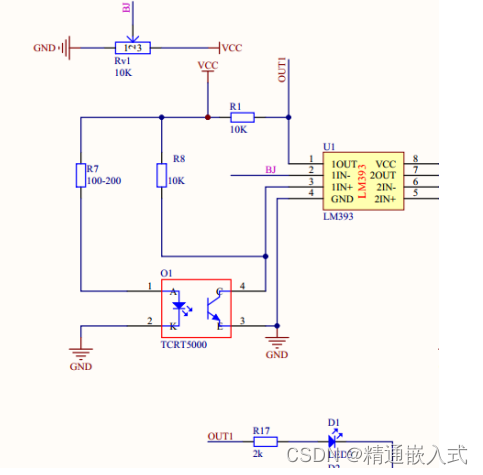
TCRT5000传感器的红外发射二极管不断发射红外线,当发射的红外线没有被反射回来或者反射回的强度不够大时,红外接收管一直处于关闭状态,此时比较器LM393的2脚的电压低于3脚的电压,输出OUT1为低电平,LED1为点亮状态;当红外反射强度足够且被接收到时,比较器LM3932脚的电压大于3脚的电压,输出OUT1为低电平,LED1为熄灭状态。简单的可以理解为遇到黑线灯亮,遇到白线灯灭。
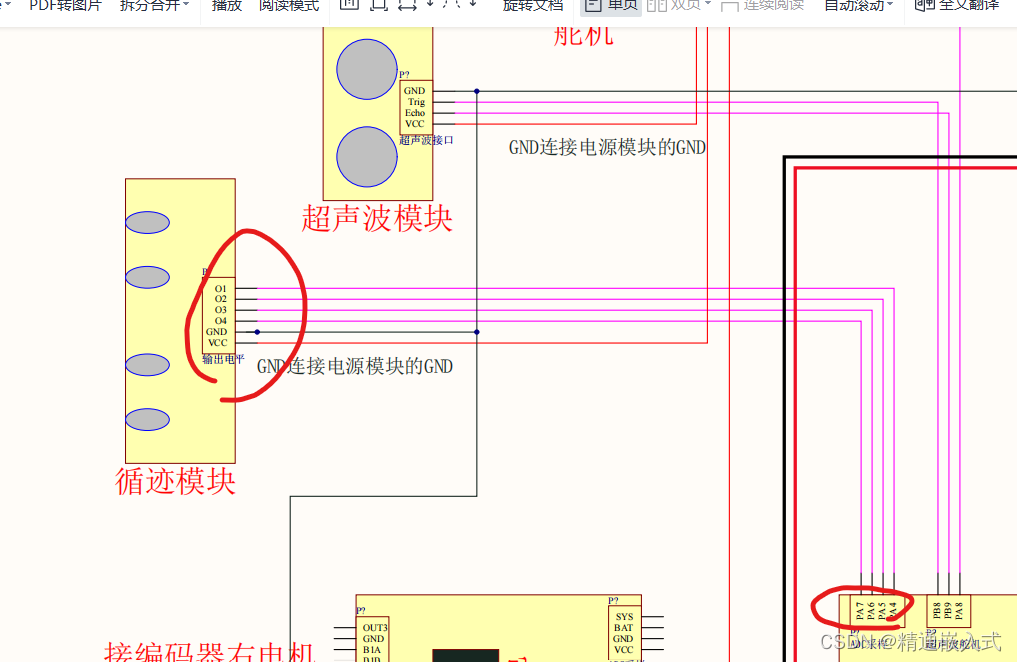
红外循迹模块和STM32的接线图
此红外循迹模块使用到了4个IO口分别接到了STM32的PA4~PA7。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1290
1290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











