






 本文深入探讨了动态规划的概念,包括最优子结构和重叠子问题性质,并通过矩阵连乘问题、最长公共子序列、最大子段和等经典例子详细解释了状态转移方程及其物理意义。此外,还介绍了0-1背包问题、最优二叉搜索树、石子合并等复杂问题的动态规划解决方案。最后,讨论了独立任务最优调度问题,阐述了如何找到最短的完成时间。文章旨在帮助读者理解和掌握动态规划在解决优化问题中的应用。
本文深入探讨了动态规划的概念,包括最优子结构和重叠子问题性质,并通过矩阵连乘问题、最长公共子序列、最大子段和等经典例子详细解释了状态转移方程及其物理意义。此外,还介绍了0-1背包问题、最优二叉搜索树、石子合并等复杂问题的动态规划解决方案。最后,讨论了独立任务最优调度问题,阐述了如何找到最短的完成时间。文章旨在帮助读者理解和掌握动态规划在解决优化问题中的应用。
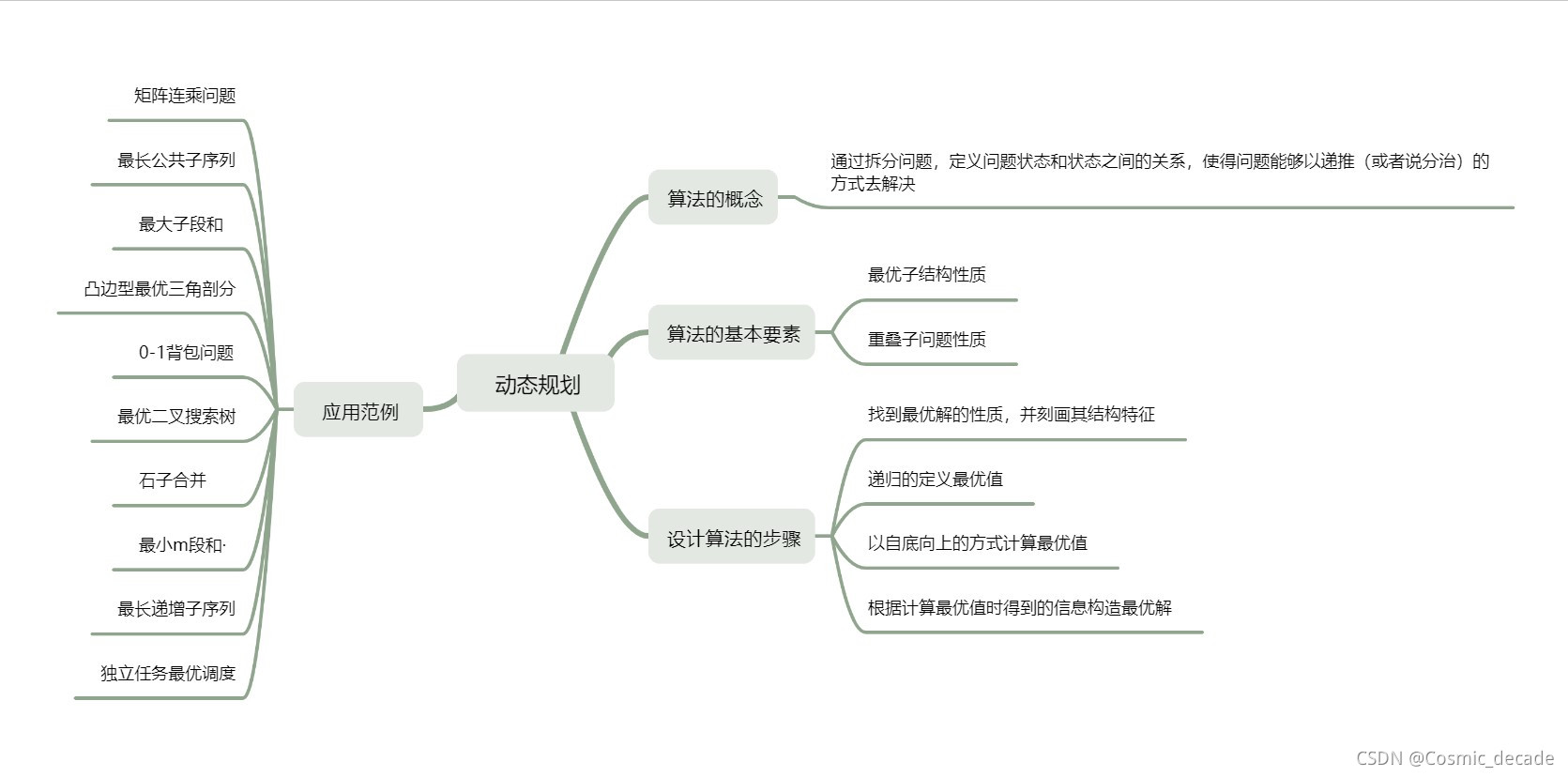
最优子结构性质:如果问题的最优解所包含的子问题的解也是最优的,我们就称该问题具有最优子结构性质(即满足最优化原理)。最优子结构性质为动态规划算法解决问题提供了重要线索。保证算法的正确性。
重叠子问题性质。重叠子问题性质是指在用递归算法自顶向下对问题进行求解时,每次产生的子问题并不总是新问题,有些子问题会被重复计算多次。动态规划算法正是利用了这种子问题的重叠性质,对每一个子问题只计算一次,然后将其计算结果保存在一个表格中,当再次需要计算已经计算过的子问题时,只是在表格中简单地查看一下结果,从而获得较高的效率。
应用范例
矩阵连乘问题状态转移
这个问题的关键特征是:计算A[1:n]的最优次序所包含的矩阵子链A[1:k]和A[k+1:n]的次序也是最优的。我们可以反证来证明:如果A[1:n]的最优次序所包含的矩阵子链A[1:k]不是最优,那肯定有一个是比他次序少的,我们用其替换A[1:k],所得的A[1:n]将比先前的更少,也就是说A[1:n]不是最有次序,矛盾
状态转移方程:
stra[i][j]=0 i=j;
stra[i][j]=min(i<=k<j){stra[i][k]+stra[k+1][j]+p(i-1)*p(k)*p(j)} i<j.
物理意义:
stra[i][j]表示矩阵A[i]到A[j]的最少数乘次数。
最长公共子序列
状态转移方程:
c[i][j]=0 i>0;j = 0
c[i][j]=c[i-1][j-1]+1 i,j>0;xi = yi
c[i][j]=max{c[i][j-1],c[i-1][j]} i,j>0;xi != yi
物理意义:
c[i][j]记录序列X前i位和序列Y前j位的最长公共子序列的长度。
最大子段和
状态转移方程:
dp[i]=max(dp[i-1]+a[i],a[i]) 1<=i<=n
物理意义:
dp[i]表示前i和数的最大字段和
凸边型最优三角剖分
与矩阵连乘相似
状态转移方程:
dp[i][j]=0 i=j;
dp[i][j]=min(i<=k<j){dp[i][k]+dp[k+1][j]+w((vi-1)(vk)v(j))} i<j.
物理意义:
dp[i][j](1<=i<j<=n)为子凸多边形((vi-1)(vi)...(vj) 的 最 优 三 角 剖 分 对 应 的 最 优 值 的最优三角剖分对应的最优值 的最优三角剖分对应的最优值
0-1背包问题
状态转移方程:
dp[i][j]=dp[i-1][j] j<w[i]
dp[i][j]=max(dp[i-1][j],dp[i-1][j-w[i]]+v[i]) j>=w[i]
物理意义:
dp[i][j]表示前i个物品容量为j时的最大价值
w[i]第i个物品的大小/体积
v[i]第i个物品的价值
最优二叉搜索树
状态转移方程:
e[i][j]=q i-1 j=i-1
e[i][j]=min(i<=r<=j){e[i][r-1]+e[r+1][j]+w(i,j) } i<=j
物理意义:
qi为虚拟键闸查找概率
定义e[i,j]为包含关键字ki,...,kj的最优二叉查找树的期望代价。
对一棵关键字ki,...,kj的子树,定义其概率总和为:w(i,j)
石子合并
n堆石子,可以化成n条直线问题,取最小值即可。下面就是对于每一条直线问题,我们如何解决。第一点,我们要明确这条直线是从哪里开始的;第二点,我们要明确直线包括了哪些石子。即起点和长度。针对第二种问题,我们可以用起点到终点来表示,但是对于环形而言,直线就转化为0->4, 1->0, 2->1, 3->2, 4->3,用数组不好表示。对于起点和长度,我们可以用二维数组,两个坐标分别表示起点和长度。比如dp[1][5]表示从编号为1的石堆开始,合并从1开始的5个石堆所需要的最小花费。
状态转移方程:
dp[i][n]=0 n=1;
dp[i][n]=min(dp[i][k]+dp[(i+k)%n][n-k]+getSum(i,n)) 1<=k<=n
物理意义:
dp[i][n]是指从i起的n堆石子,dp[i][k]是从i起的k堆,k到k+1为间断点,还剩下n - k堆,是从编号为(i + k) % n的石堆开始的,合并这两堆的费用是getSum(i, n)。步长为1时,花费为0。从步长为2开始,对于每条直线,计算dp[i][n]的最值,直到n == N(总共的堆数)。dp[i][N]的最小值即为所求。
最小m段和
状态转移方程:
dp[i][j]=dp[i-1][j]+a[i] j=1
dp[i][j]=dp[i][j] = MIN(for(k=1; k<=i; k++)MAX(dp[k][j-1], dp[i][1] - dp[k][1])) j>1
物理意义:
用dp[i][j]存储长度为i,分j段后其子序列和的最大值的最小值,这当中k表示的是分段的最后一段子序列的开始下标,所以dp[k][j-1]是前面j-1段子序列和的最大值的最小值,dp[i][1] - dp[k][1]是最后一段子序列的和。所以取这两段中的最大值,在k值变化过程中取得到的最小值。
最长递增子序列
状态转移方程:
dp[i]=1, i为第一个字符的角标(0或1)
dp[i]=max(dp[i],dp[j]+1) j<i;s[j]<s[i]
物理意义:
从左到右依次考虑,每遇到一个点就从第一位开始遍历到该点,看以这个点作为前缀是否为最大值。dp[i]表示以第i个字符结尾的最大递增子序列的长度.
优化
只管维持一个最小的递增子序列即可。End数组存最小递增子序列,遍历字符串,如果字符ch[i]比end数组的最后一个字符大,则添加至end数组后,计数加一;否则在end数组二分查找第一个大于等于ch[i]的字符,将其替换。遍历完后,计数器的值即为最优解。
独立任务最优调度
状态转移方程:
dp[i][j]=dp[i-1][j]+b[i] other
dp[i][j]=min(dp[i-1][j-a[i]],dp[i-1][j]+b[i]) a[i]<=j<=sum[a[1..i]]
物理意义:
dp[i-1][j]+b[i]表示第i个作业A机器不去做,交给B机器做,B处理的时间;而dp[i-1][j-a[i]表示作业i由机器A处理,B不需要管,所以B机器处理的时间就是上一个作业的处理时间,即为dp[i-1][j-a[i]]。
又完成任务最短时间应该由A机器完成时间和B机器完成时间中最大的那一个决定。因为一项任务真正的完工需要等待两个同时完工才算完成。
我们可以明确了,在确定B机器处理时间时,我们会取最小值;当计算作业完成时间时,我们要取A、B中的最大值,最后还要取最小值才表示完成作业的最短时间(这里取的最小值是分配问题,即作业由A机器处理的时间会产生不同,我们先算出A处理所用的总时间,在这个时间范围内进行遍历,所有分配种类中取最小。)最优解为n个作业,所有分配情况,每个情况取A、B机器所用时间的较大值,再在所有较大值中取最小值,即为最优。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









