







目录
送料机械手设计及Solidworks运动仿真
摘要
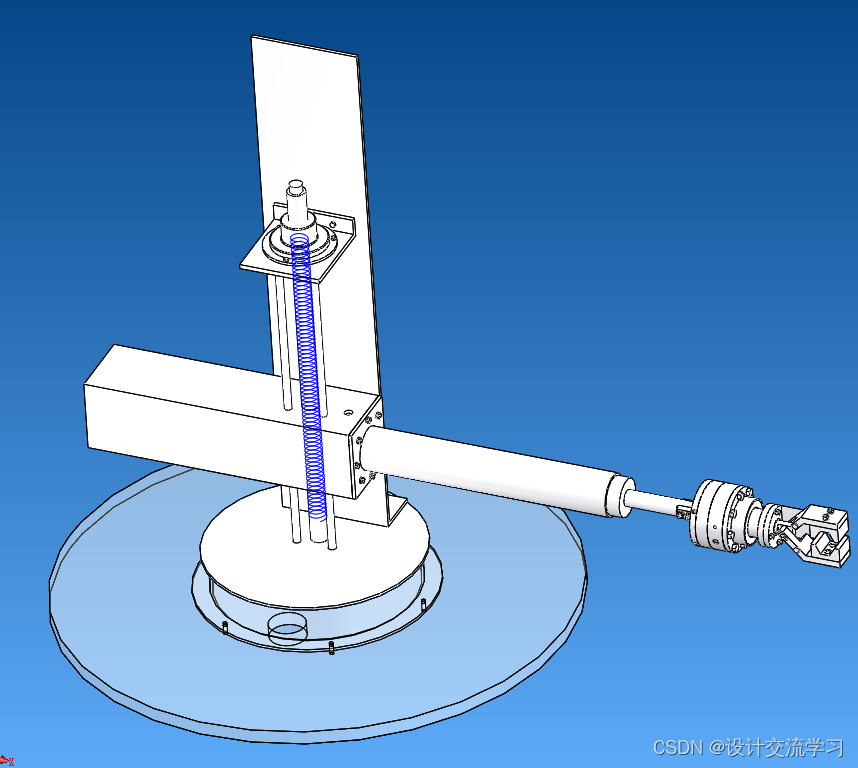
本课题是为普通车床配套而设计的上料机械手。工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
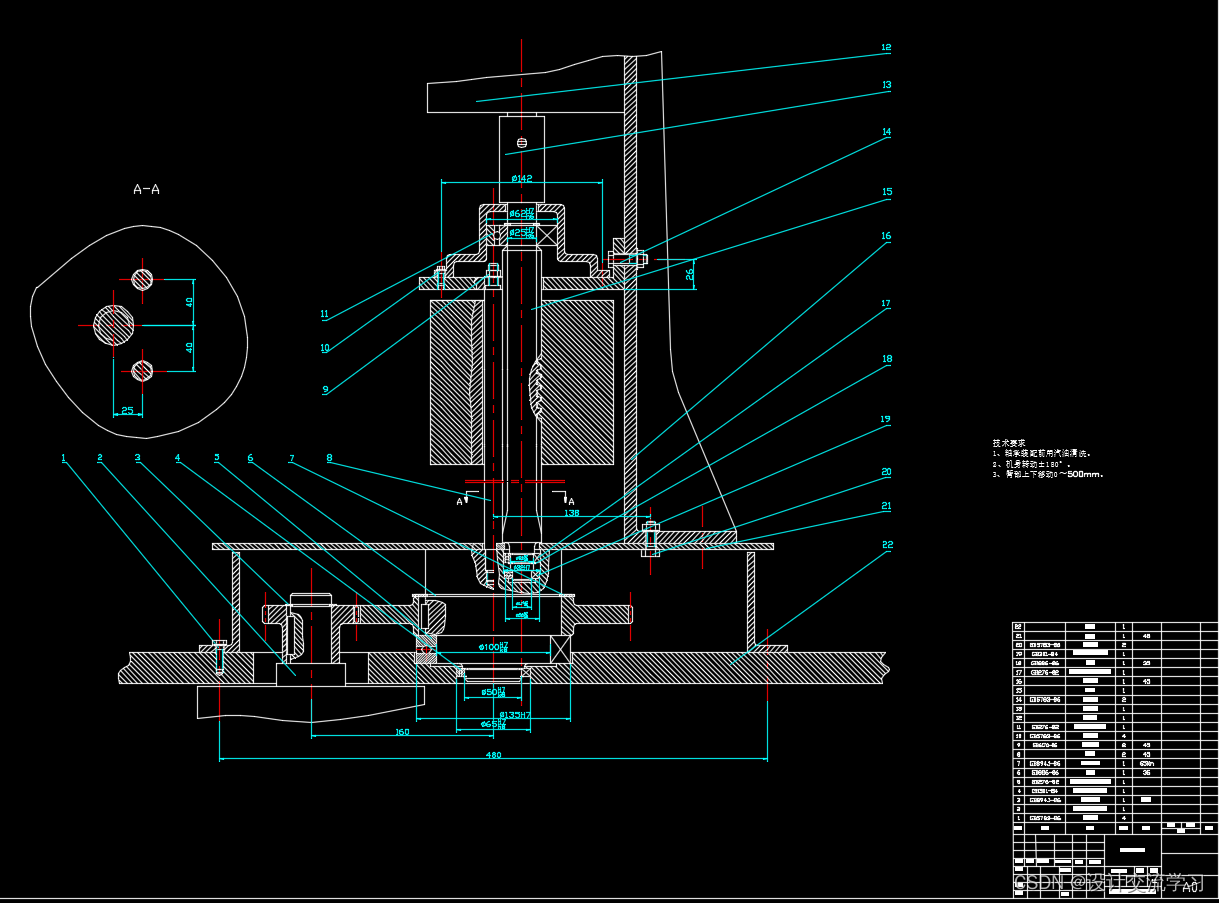
本课题通过应用AutoCAD 技术对机械手进行结构设计和液压传动原理设计,运用Solidworks技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前。它能实行自动上料运动;在安装工件时,将工件送入卡盘中的夹紧运动等。上料机械手的运动速度是按着满足生产率的要求来设定。
关键字 机械手,AutoCAD,Solidworks 。
第一章 机械手设计任务书
1.1毕业设计目的
毕业设计是学生完成本专业教学计划的最后一个极为重要的实践性教学环节,是使学生综合运用所学过的基本理论、基本知识与基本技能去解决专业范围内的工程技术问题而进行的一次基本训练。这对学生即将从事的相关技术工作和未来事业的开拓都具有一定意义。
其主要目的:
-
- 培养学生综合分析和解决本专业的一般工程技术问题的独立工作能力,拓宽和深化学生的知识。
- 培养学生树立正确的设计思想,设计构思和创新思维,掌握工程设计的一般程序规范和方法。
- 培养学生树立正确的设计思想和使用技术资料、国家标准等手册、图册工具书进行设计计算,数据处理,编写技术文件等方面的工作能力。
- 培养学生进行调查研究,面向实际,面向生产,向工人和技术人员学习的基本工作态度,工作作风和工作方法。
1.2本课题的内容和要求
(一、)原始数据及资料
(1、)原始数据:
-
-
- 生产纲领:100000件(两班制生产)
- 自由度(四个自由度)
-
臂转动180º
臂上下运动 500mm
臂伸长(收缩)500mm
手部转动 ±180º
……


















 320
320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









