







 本文介绍了针对我国花生种植特点研制的半喂入式花生联合收割机,该机采用分体传动系统,具有液压无级变速底盘,并设计了弹性齿式排土装置以改善排土性能。摘果装置和清洗装置分别采用摆动行程和空气筛组合式设计,提高摘果和清洁效率。目前,我国花生收获机械化程度仍有待提高,此类研究旨在推动农业现代化进程。
本文介绍了针对我国花生种植特点研制的半喂入式花生联合收割机,该机采用分体传动系统,具有液压无级变速底盘,并设计了弹性齿式排土装置以改善排土性能。摘果装置和清洗装置分别采用摆动行程和空气筛组合式设计,提高摘果和清洁效率。目前,我国花生收获机械化程度仍有待提高,此类研究旨在推动农业现代化进程。
摘 要
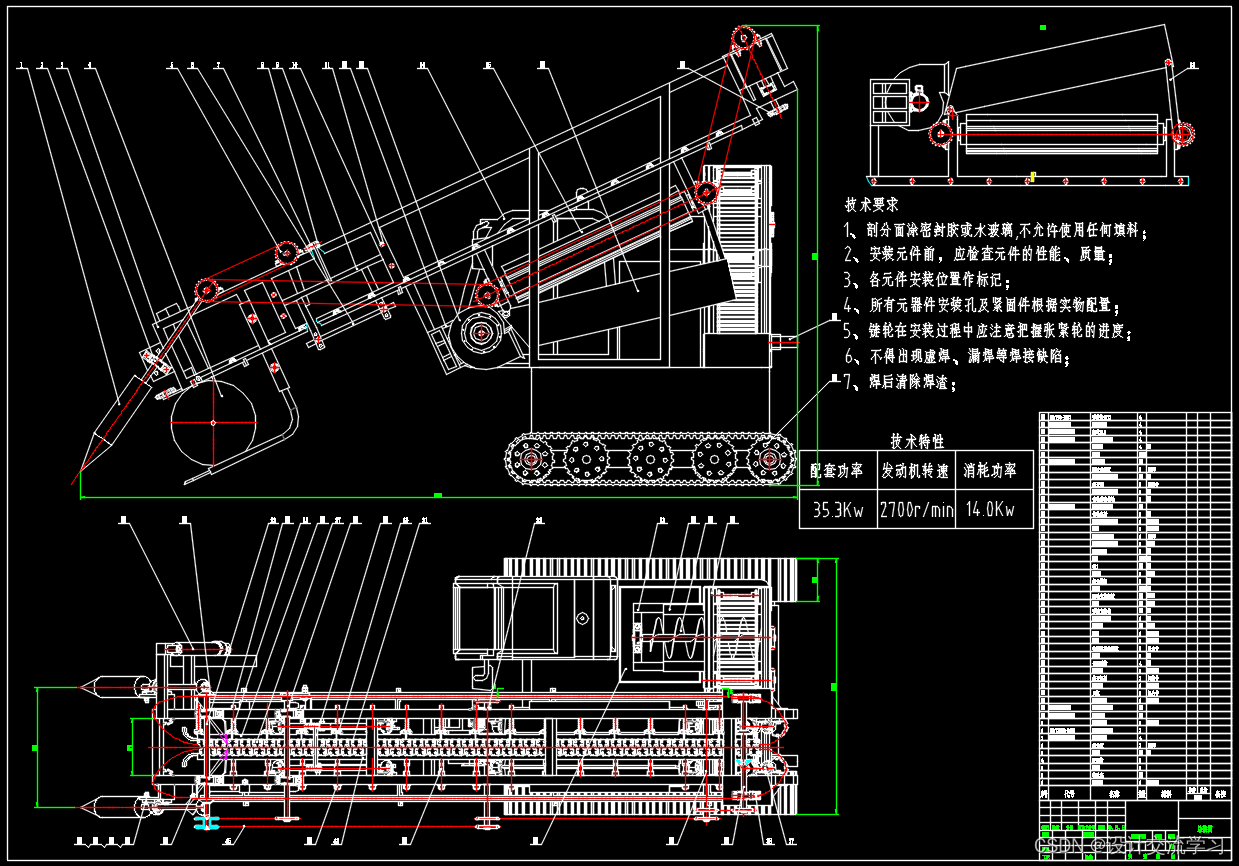
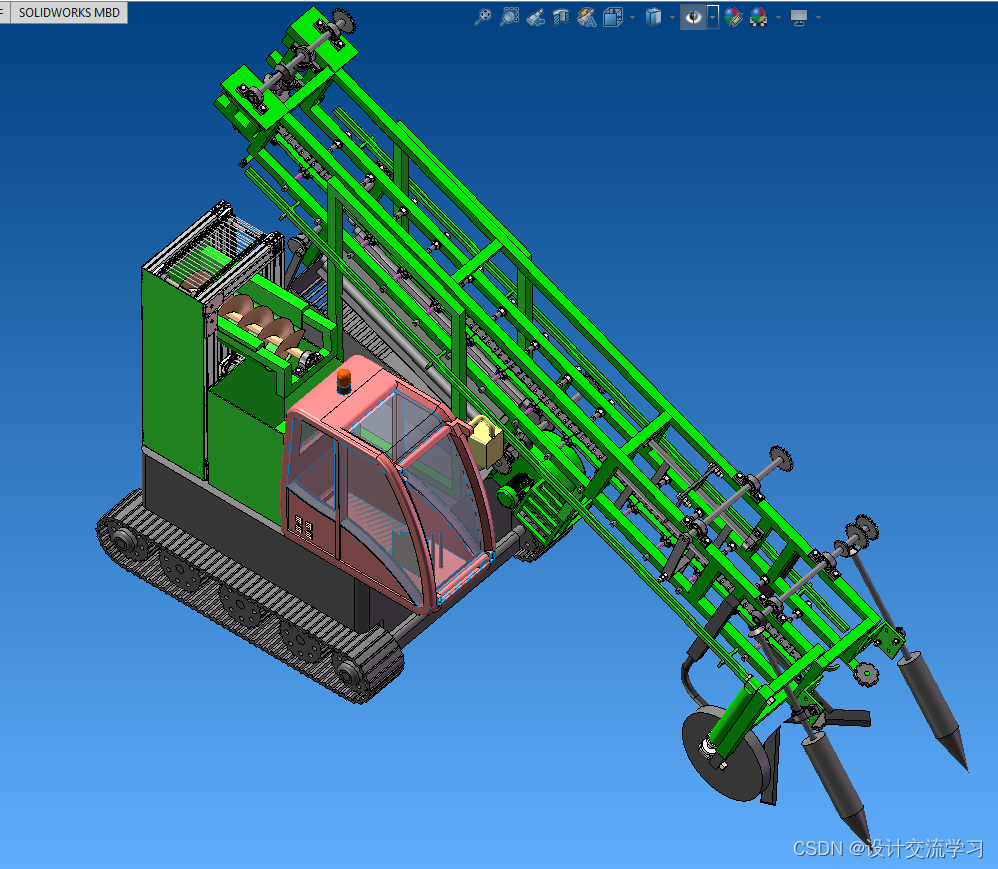
根据我国花生种植的特点和设计经验,研制了适合我国花生主产区收获作业的半喂入式花生联合收获机。该设备主要包括底盘、传动系统和操作部件,横向整体布置。底盘配有液压无级传动系统,借用用联合收割机的底盘,采用分体传动系统。操作部件包括抓斗、挖掘装置、夹紧传动装置、清土装置、摘果装置、清洗系统、收果系统等,根据挖拉结合的原理,利用柔性夹紧方法。针对花生联合收割机上下摆和水平摆排土性能差的问题,设计了弹性齿式排土装置。摘果装置采用摆动行程的工作原理,提高鲜花生和湿花生的摘果率;清洗装置采用空气筛组合式。
关键词:联合收货机;花生;弹齿式去土装置;振动筛
ABSTRACT
According to the characteristics of peanut planting in China and the design experience, a half feeding peanut combine harvester suitable for the harvest operation in the main peanut producing areas in China was developed. The equipment mainly includes the chassis, transmission system and operation components, which are arranged laterally as a whole. The chassis of the 450 type half feed rice wheat combine adopts the split transmission and is equipped with the hydraulic stepless speed change system. The operation components include the grazer, the digging device, the clamping transmission device, the soil cleaning device, the fruit picking device, the cleaning system and the fruit collecting system. Based on the principle of digging and pulling combination, the machine greatly reduces the mechanical fruit dropping rate of peanut by using the flexible clamping method. Aiming at the problem of poor soil removing performance of the up and down swing and the horizontal swing swing swing of the peanut combine harvester, the elastic tooth type soil removing device is designed. The fruit picking device adopts the working principle of swing stroke to improve the picking rate of fresh and wet peanuts; the cleaning device adopts the air screen combination type.
Key words: Combined receiver; Peanut; Tine type soil removal device; Vibration sieve
目 录
第1章 绪 论
1.1 引言
花生是世界上广泛种植的主要油料作物,也是我国出口的主要农产品之一。我国花生种植面积约433万Hm 2,是世界第二大花生种植国。花生是季节性农作物,收获期集中,对劳动者的体力要求较高。人工收割不仅效率低,占用大量农时,而且损失大。
1.2 研究目的及意义
在我国大部分地区,花生收获仍以人工收获为主。花生收获机械正处于发展阶段。在一些地区,使用花生挖沟机,而在一些地区,使用花生收获(挖掘)机。与发达国家比较,我国的联合收割技术还处于技术发展初期,距离技术成熟阶段还有较长时间。虽然我过花生主产区急需联合收割的技术设备,但由于我国对这方面的研究起步较晚,还存在许多的问题。为了加快我国农业现代化建设的发展步伐,我们不得不打破技术储备不足的发展瓶颈,因此,花生收获机械化成为了农业现代化的主要研究内容。
1.3 国内外研究现状
国外对花生收获机的研究起步较早,技术也比较先进。由于国外花生种植方式以一年制为主,种植面积大,采用二次收获的方法。9997、9960sp四排自走式花生收获机和2100六排牵引式花生收获机是美国弗吉尼亚州阿玛达斯公司生产的代表机型,美国KMC公司生产的KMC3376、kmc3374迁引式联合收割机。
我国花生联合收割机的研究比较晚,技术有待提高。目前,市场上还没有能够满足生产要求的花生联合收割机。目前国内最先进、最实用的花生联合收割机是由台湾一家公司生产的tbh-3252型白色行走花生联合收割机,可同时完成花生的挖土、振土、摘果、分离、清洗等多项工序,该机采用履带式行走装置,开裂率小于2.4%,除荚率高达18%。由于其高昂的价格,普通农民无法接受,不适合在大陆推广应用。在充分消化的基础上,4lh2半喂入式自走式花生联合收获机是由农业部南京农机化研究所研制的,这款机型已在主要生产领域得到示范应用,它吸收了台湾、韩国、日本花生联合收获机的先进技术。
1.4 本文研究的内容
根据要求,对于本设计要做以下几个方面的研究:
(1)收获机的工作过程和具体结构;
(2)完成收获机机方案设计;
(3)设计传动系统;
(4)设计作业组件;
(5)链传动计算;
……



















 370
370

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









