







 本文概述了智能轮椅的发展现状,包括国内外的发展情况、系统方案(机械系统、控制方案和总体设计)、机械结构计算(如链条传动和电动机选择),以及控制系统设计。特别强调了安全导航在智能轮椅中的核心作用。此外,还讨论了国内电动轮椅的生产现状、与国外的比较,以及国家对智能轮椅产业的支持。
本文概述了智能轮椅的发展现状,包括国内外的发展情况、系统方案(机械系统、控制方案和总体设计)、机械结构计算(如链条传动和电动机选择),以及控制系统设计。特别强调了安全导航在智能轮椅中的核心作用。此外,还讨论了国内电动轮椅的生产现状、与国外的比较,以及国家对智能轮椅产业的支持。
目 录
1 绪论 ............................................................................................................................ 2
1.1 国内外发展情况 ............................................................................................................. 4
1.2 设计内容 ........................................................................................................................5
1.3 设计思路 ........................................................................................................................5
2 系统方案 .......................................................................................................................7
2.1 机械系统方案 ....................................................................................................................7
2.2 控制方案 ........................................................................................................................9
2.3 总体方案 .......................................................................................................................10
3 机械结构计 .................................................................................................................11
3.1 链条的传动设计 ............................................................................................................11
3.2 电动机的选用 ..............................................................................................................11
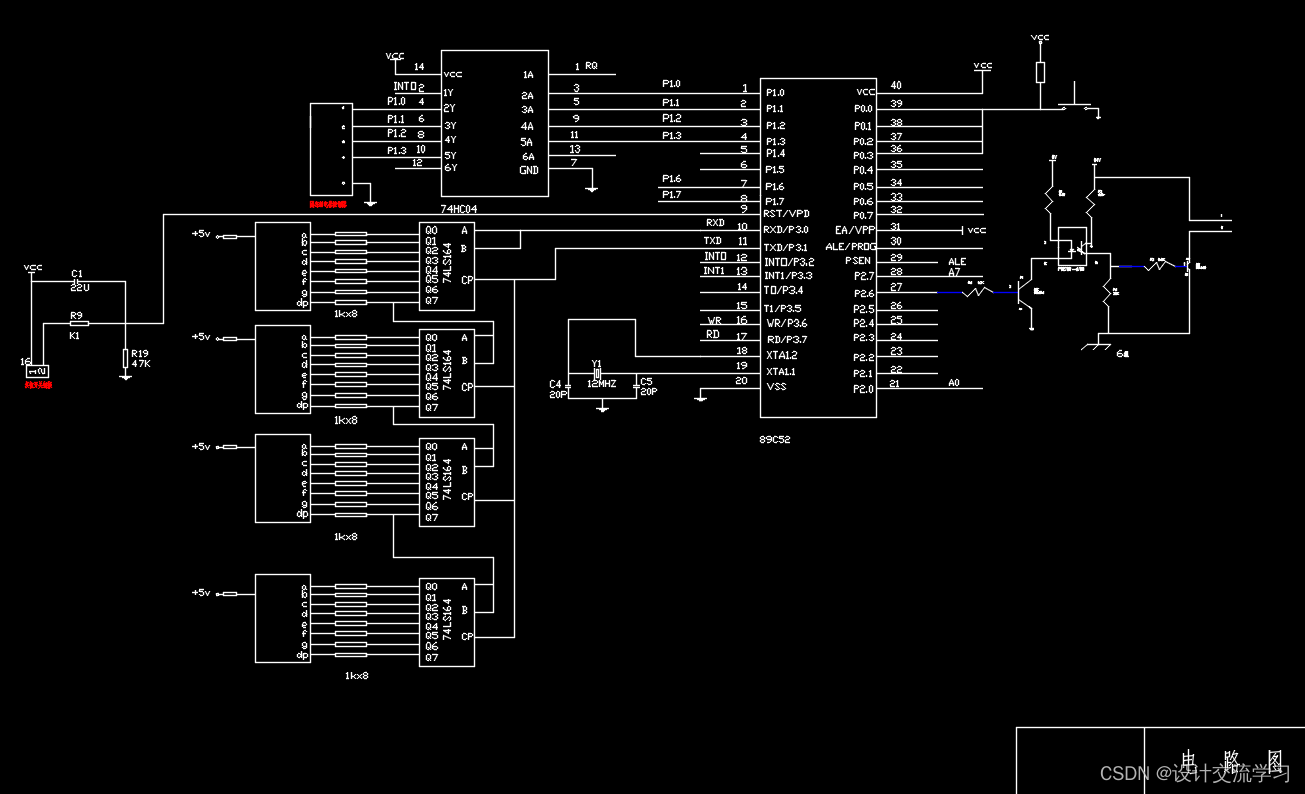
3.3 驱动电路设计 ................................................................................................................12
4 控制系统设计 ...............................................................................................................13
4.1 控制系统软件设计 ...........................................................................................................14
5 总 结 ..........................................................................................................................14
5.1 设计总结 ....................................................................................................................... 14
5.2 展望 ........................................................................................................................... 14
参考文献 ........................................................................................................................... 15
附录 ...................................................................................................................................18
致谢 ..................................................................................................................................... 19
一、绪 论
1.1 自行走轮椅国内外发展情况
随着社会的发展和人类文明程度的提高,人们特别是残疾人愈来愈需要运用现代高新技术来改善他们的生活质量和生活自由度。因为各种交通事故、天灾人祸和种种疾病,每年均有成千上万的人丧失一种或多种能力(如行走、动手能力等)。
随着人口的增长和医疗技术的进步,社会老龄化问题已成为很多国家不得不认真对待的重要问题之一。智能轮椅能够帮助老年人和残障人士独立的生活,节省家庭护理费用,减轻社会负担。许多国家投入较多资金研究智能轮椅,涌现出许多成果,但由于价格和实用性的原因使它们暂时只能作为实验产品。
智能轮椅作为移动机器人的一种,主要用来辅助老年人和残疾人的日常生活和工作,是对他们弱化的机体功能的一种补偿.智能轮椅在作为代步工具的同时又可以使用携带的机器手臂完成简单的日常活动.使他们重新获得生活能力,找回自立、自尊的感觉,重新融入社会.因而,智能轮椅的研究得到越来越多的关注
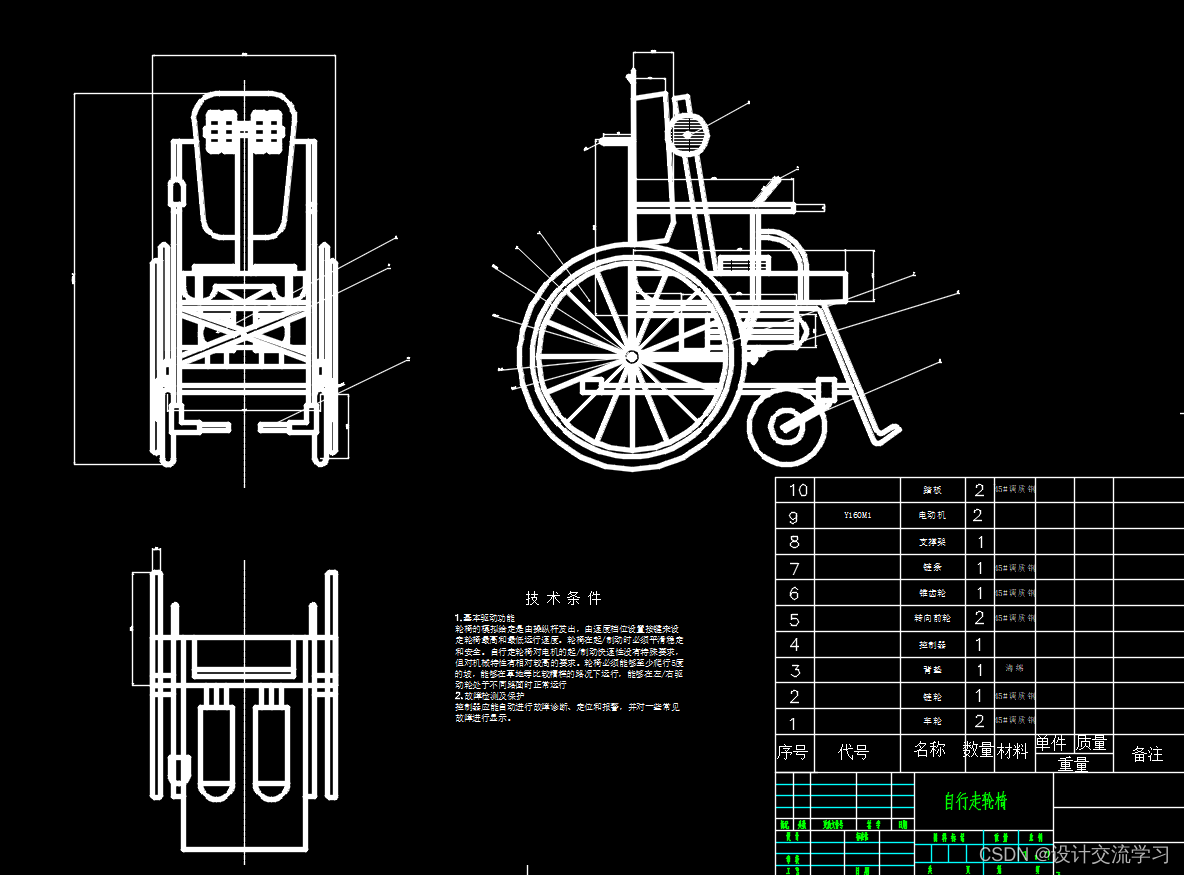
本设计的研究目标:在最经济的条件下,设计出一件最实用、最简易操作的自行走轮椅,功能齐全、结构简单、适用于伤残人士、且能达到消费者需求水准的一件市场普及化产品。
主要特色:功能齐全、结构简便、使用方便、价格适当、安全系数强
电动轮椅技术及其产业化
1.产品特点
电动轮椅作为一种安装有传感器,具有良好的智能控制功能的电动轮椅,不但具有普通的当前市面上电动轮椅所具有的所有功能,而且可以实现更加友好的人机接口和良好的操作性能。例如,可以实现避碰功能和导航功能,甚至可以实现利用无线方式将使用者的位置和基本状态传送给医护人员和家人实现实时监控。
国内外研究现状及发展趋势(含文献综述):
自动轮椅作为医疗护理领域的服务机器人,其应用大量使用了移动机器人技术在自动轮椅的研究中涉及到的关键技术有导航系统、控制和能源系统、人机接口
但由于整个轮椅系统以人为中心,所以在研究中要解决的核心是轮椅的安全导航问题所谓导航即是指移动机器人按照预先给定的任务命令,根据已知的地图信息作出全局路径规划,并在行进过程中,不断感知周围的局部环境信息,自主地作出各种决策,并随时调整自身位姿,引导自身安全行驶到达目标位置
智能轮椅作为医疗护理领域的服务机器人,其应用大量使用了移动机器人技术。在智能轮椅的研究中涉及到的关键技术有导航系统、控制和能源系统、人机接口,但由于整个轮椅系统以人为中心,所以在研究中要解决的核心是轮椅的安全导航问题。所谓导航即是指移动机器人按照预先给定的任务命令,根据已知的地图信息作出全局路径规划,并在行进过程中,不断感知周围的局部环境信息,自主地作出各种决策,并随时调整自身位姿,引导自身安全行驶到达目标位置。
随着社会的发展和人类文明程度的提高,人们特别是残疾人愈来愈需要运用现代高新技术来改善他们的生活质量和生活自由度。因为各种交通事故、天灾人祸和种种疾病,每年均有成千上万的人丧失一种或多种能力(如行走、动手能力等)。因此,对用于帮助残障人行走的机器人轮椅的研究已逐渐成为热点,如西班牙、意大利等国,中国科学院自动化研究所也成功研制了一种具有视觉和口令导航功能并能与人进行语音交互的智能轮椅。
近几年来我国轮椅车的生产近几年有了较大的发展,据中商情报网监测数据显示,目前全国规模以上轮椅生产企业约有30多家企业,主要集中在东部及沿海发达地区,外商投资轮椅生产企业在中国轮椅行业占绝对领导地位。近年来随着人口老龄化到来及我国残疾人康复事业的发展,这为轮椅生产企业提供了良好的空间和广阔的市场前景。
。
3.同国外产品的综合比较
技术水平方面:与国外相比国内已经基本上没有差距,在某些方面甚至还具有一定优势。
生产工艺方面:虽然与国外相比还有一定差距,但通过分析解剖国外产品特点,利用自身优势可以在较短时间内缩小这种差距。研发和生产成本方面:与国外相比,国内具有相当大的优势。市场潜力方面:国内电动轮椅市场刚刚启动,尚没有强有力的竞争对手,市场潜力非常大。
4.国内现有企业情况介绍
首先,国内尚无具备智能轮椅生产的企业,现有的轮椅生产企业还主要定位在电动轮椅的生产上。且由于国内目前上不具备研制开发高性能电动轮椅控制器的能力,国内的生产企业的电动轮椅产品基本上都采用了国外的电动轮椅控制器,甚至部分企业的电动驱动总成也采用了外购方式,因此国内现有企业的产品成本居高不下,影响了市场购买能力的形成。同时由于不得不采用价格昂贵的进口控制器,国内电动轮椅产品的市场售价长期以来居高不下,难以为普通用户接受,也直接影响了电动轮椅市场的启动。
5.国家产业支持
国家科技发展部门已经看到智能轮椅产业的发展契机,已经从国家的产业发展角度来对其未来的发展进行支持。
……



















 320
320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









