







 本文探讨了自动捡球机器人的设计,包括行走机构、捡球策略、3D建模及传感器选择。论文详细描述了整体方案、运动机构设计、传感器应用以及智能化发展趋势。
本文探讨了自动捡球机器人的设计,包括行走机构、捡球策略、3D建模及传感器选择。论文详细描述了整体方案、运动机构设计、传感器应用以及智能化发展趋势。
目录
4.3 红外测距传感器:遇到障碍物自动躲避(注颜色传感器优先于它)
1 绪论
机器人是一个自动执行某种动作的机械装置,它既可以接受人类指挥,又可以运行预先编制的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。现在,机器人在各行各业中,都有着广泛的应用,例如制造业、建筑业,或是其它危险性的工作[1]。
要想设计出一个机器人,就必须要具备以下这些方面的能力。第一,电子学基础。这部分内容包括模拟电路和数字电路理论,要学习电阻、电容器、晶体管以及其他普通电子元器件等基础知识。第二,编程基础。先进的机器人都使用计算机或微处理器(例如单片机)来控制自己运动的,这就需要靠编程来实现。第三,机械基础。机器人也是一台机器,要靠运动来完成任务。要想设计一个机器人这就需要设计一些相应运动的机械机构。
随着计算机技术和人工智能技术的高速发展,机器人在功能和技术上都取得了很大的提高。现在,即使在严峻的经济形势下,仍有很多面向各个新应用领域的机器人不断涌现出来。目前,机器人应用率的快速增长并非仅仅是一时的狂热,而是社会发展的必然趋势。许多枯燥、肮脏和危险的工作最终将由机器人代替人工来完成。随着机器人技术的高速发展,机器人竞技运动在世界各地蓬勃兴起。社会在不断地发展,对机器人的要求也越来越高[2]。
目前,我国也正掀起一股机器人的热潮。我国机器人的技术也取得了很大的进步。我国的机器人技术大致有如下发展趋势:(1)智能化。智能化不仅是对机器人系统的要求,也是对工作环境的要求。智能化的发展趋势,有效地提高机器人工作的效率和使用性能。(2)标准化和模块化。我国还没有统一的机器人标准。统一的标准和平台能够大大减少应用软件厂商的成本,并能优化服务机器人领域的体系结构,规范中间件,实现模块化[3]。
自动识别并接收到运动员发出的捡网球命令后,采用图像识别技术自动识别网球落下的方位。然后,对网球的位置分布作一个最优的行程判断,再走到每个球落下的地方。最后,将网球捡起来,放进存放腔中。当机器人接收到由运动员发出送球指令后,再自动地把网球送到指定点,完成自动捡网球的一个工作流程。
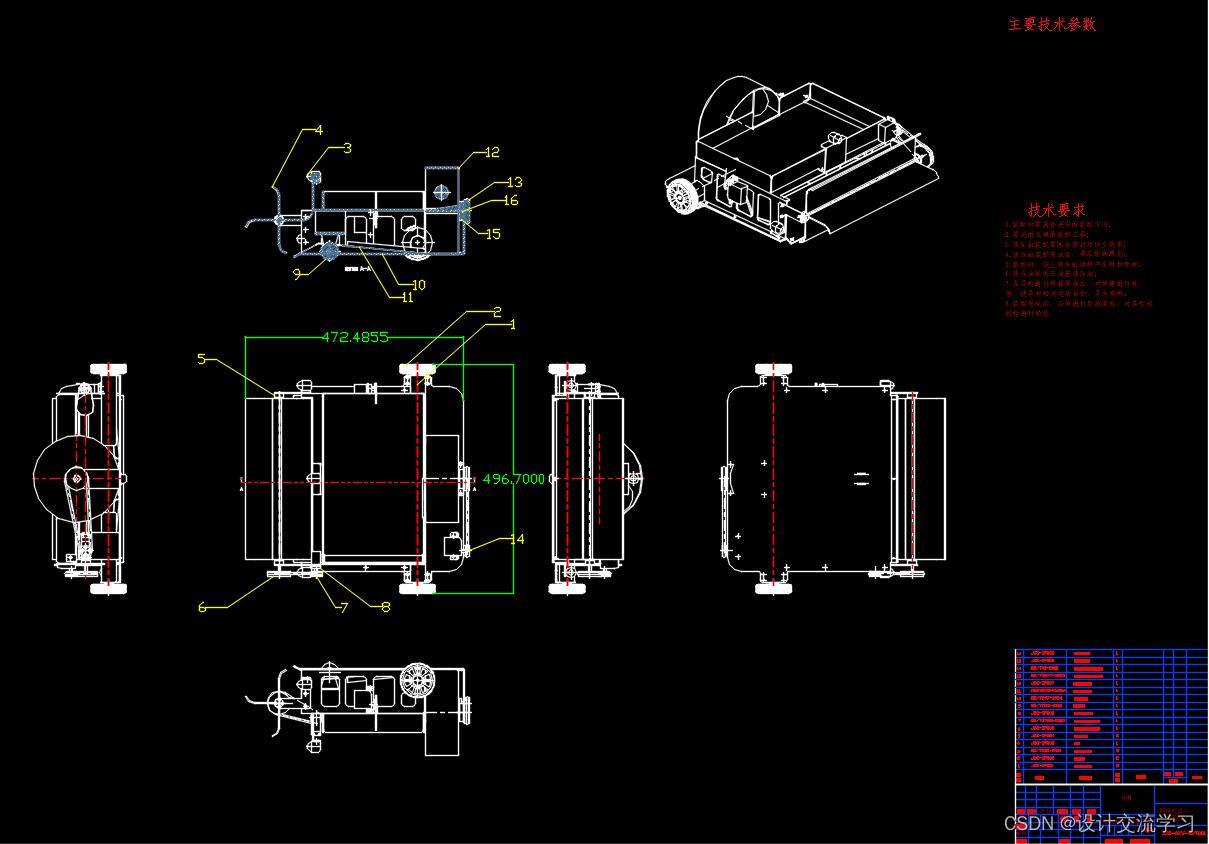
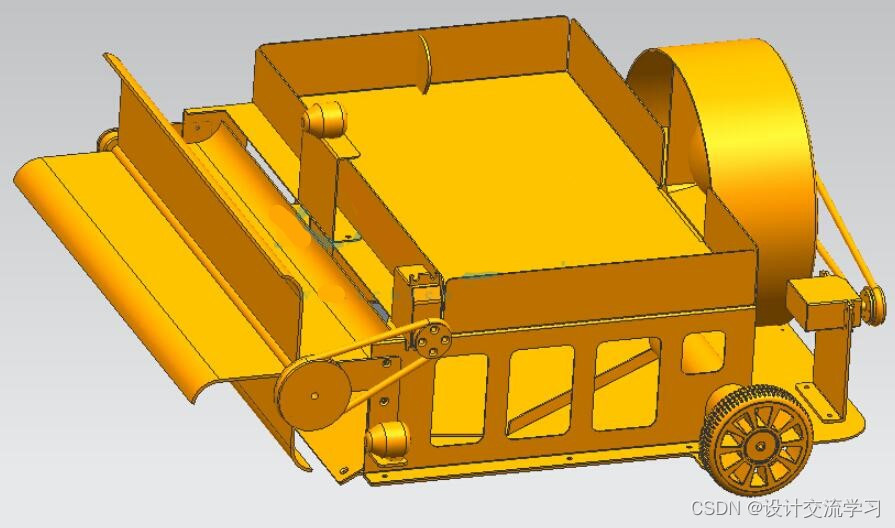
本论文,主要涉及到的是机械结构部分的设计,采用3D软件构建出机器人的模型,并且对各个设计出的运动机构进行分析说明。
本论文主要分为以下几部分。第一部分,总体方案的设计。主要介绍设计的自动捡球机器人的基本构造、捡球的方法、驱动方式和主体制造材料的选择。第二部分,各运动机构的详细设计和各部分机构的工作原理,并对各个设计的机构进行简单的分析。第三部分,主要简单地介绍安装在自动捡球机器人的传感器和导航系统。第四部分,主要是对这几个月以来,做毕业设计的一些总结和心得体会。
……



















 755
755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









