







 本文详细探讨了自动点胶机的结构、技术特点,包括XYZ轴运动系统、滚珠丝杠的选型与计算、电动机和PLC控制的应用。强调了精度、自动化和国产化与进口品牌的竞争,以及双组液体分配机的市场潜力。
本文详细探讨了自动点胶机的结构、技术特点,包括XYZ轴运动系统、滚珠丝杠的选型与计算、电动机和PLC控制的应用。强调了精度、自动化和国产化与进口品牌的竞争,以及双组液体分配机的市场潜力。
摘 要
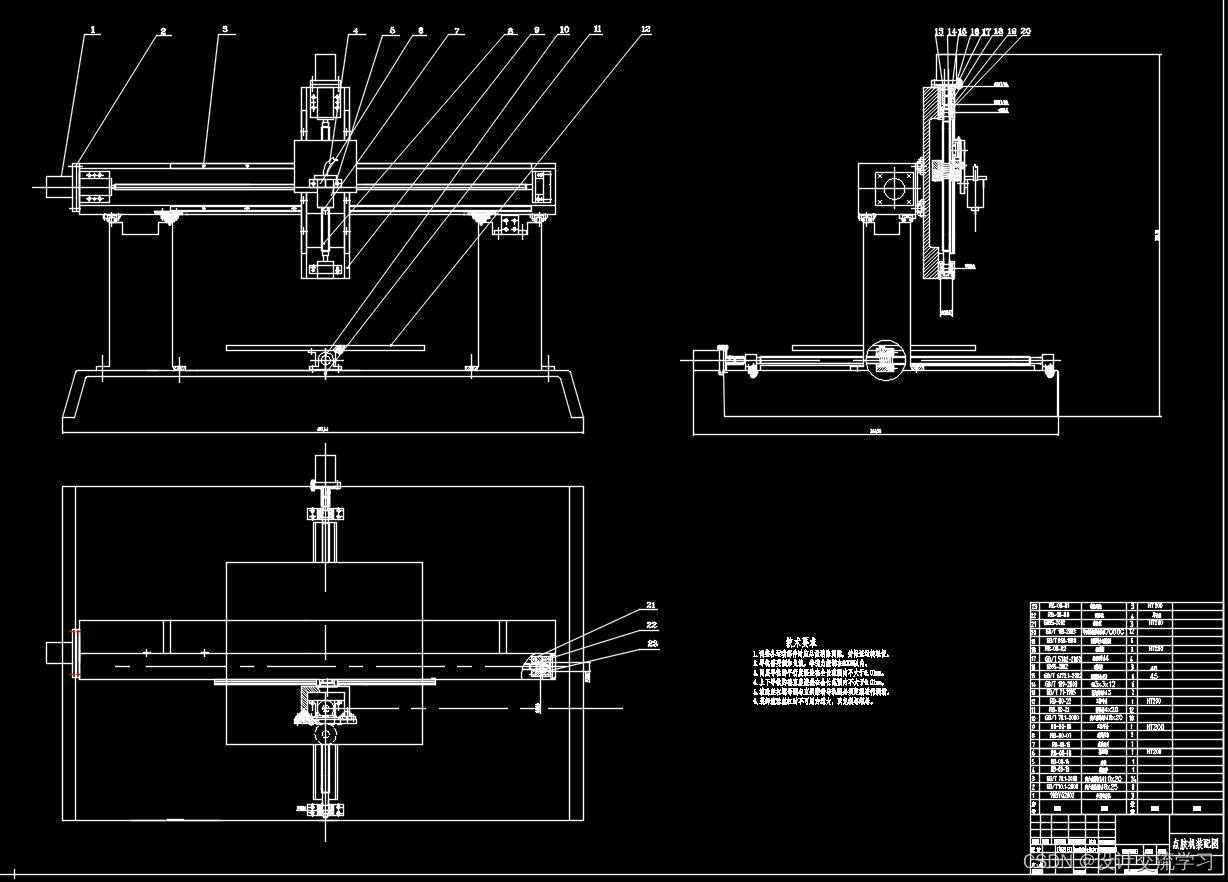
自动点胶机是由 X 轴左右方向上、Y 轴前后方向上和 Z 轴上下方向上构成 的机构。自动点胶机末端的执行机构是分配头或多点胶头,可实现 3d、4d 模 式的点胶,即在产品表层、外部轮廓、垂直的平面、球形以及曲面部位进行快 捷打点、绘画线段、绘画圆及各种形状不规则图形。精确定位,精准控胶,不 拉丝,不漏胶,不滴胶。每个方向上都有一个步进电机和滚珠丝杠,通过滚珠 丝杠可以将电机中的旋转运动变为整个机构所需的直线运动。这种结构选择 PCLS 可编程控制器来控制整个组织的运动,控制程序发送电信号来控制电机, 步进电机将信号进入分配头位移和移动速度。 同时,通过全身整修,也可以 自动点胶机进行手动控制,每个点在工作平台的范围内进行分配任务。
关键词:点胶机、XYZ 工作台、滚珠丝杠
ABSTRACT
Automatic dispensing machine throughout the main body has three movement direction, that is, X, Y, Z direction, are left and right, front and back, up and down the three directions. The actuator automatic dispensing machine is ultimately a dispensing head or a dispensing head, which can realize three-dimensional, four-dimensional path dispensing, available on the product surface, outer wall, vertical surface, spherical surface gap, fast RBI, painting line, round and irregular graphics. Precise positioning, precise control of glue, not drawing, no leakage, no glue. Each direction has a stepper motor and ball screw, through the ball screw can turn the motor into a whole body of the linear motion. The structure uses the PCL programmable controller to control the motion of the whole mechanism, and the control program sends the electric pulse signal to control the motor. At the same time, through the overall transformation of the body a little, you can also turn the automatic dispensing machine to manual control to work within the scope of the platform to complete the task of each point.
Key words: Automatic dispensing machine,Ball screw
1 绪论
过去所用的点胶方法是依靠人工手动分配,但因为人工点胶的分配速度过 于慢、容错能力低,精度无法达到企业的要求,并且因为需要人工,造成很大 的浪费用于劳动,且不能分配复杂的图形。随着社会的进一步发展和科技突飞 猛进的发展,点胶机的使用越来越得到认可,集成电路、电子元件器件,以至 于汽车的零配件等许多行业生产。所以手动点胶的传统点胶方式已经不能满足 社会发展和科技的需要,逐渐消失在日常的生产中。由于社会发展需求以及科 学发展对自动化需求程度的提高,自动化高的点胶机已经取代自动化低的点胶 机。所以,具有效率高,速度高,精度高的自动点胶机器人出现在世人面前。 它的出现为点胶机行业带来巨大的发展空间和经济利益,以此变的更加有效 效。这种机器人可以与员工进行高度的交流与沟通,易于控制和分配技术进步 为点胶的发展和进步提供了巨大的平台。
1.1 国外研究现状及发展趋势
现在点胶机主要有单液点胶机和双组胶机两种。如今,世界上单液点胶机 是主要的点胶机。世界一流品牌的胶机主要在欧美,主要在日本,如日本的 NLC 和 MUSASHI MUSASHI。就当前而言国际上已经得到成熟发展的单流体点胶机在 中国也有了很大的发展空间,国内单液分配机具有很好的一般性,通用的控制 器和自动化设备技术已经赶上了世界上单液分配机的发展。但国内公司与世界 顶级品牌之间存在巨大差距,精度更高。外资企业是主要生产双组分胶点胶机, 相对研究技术较为成熟,但价格过高,对于中国的中小型企业不太能够接受。 即便中国也有几个点胶机制造商有着相对来说比较完善和系统的研发水平,但
是因为生产技术主要是有国外品质引进的。由于国内厂商处于自主生产过程当 中,质量也很稳定,价格比国外便宜得多。适用于中国大多数企业。
1.2 国内研究现状及发展趋势
在我国,机械设备经济发展快速稳定,电子行业发展的高度,点胶机制造 商迅速增加,随着社会发展的需求,许多企业成立了独立研究所,国内研究水 平有逐步完善,点胶机也逐步在许多经济部门应用,范围广,数量庞大,成为 机械工业的重要支柱。 在建筑,电子,采矿,运输等方面已经成为无胶水的 工具,将进入胶水有很多领域,让我们知道点胶机在未来生产的发展潜力。 也 许将来会有很多其他的东西将用于胶机,点胶机的开发空间更广。
胶水是胶机的重要组成部分。 胶机使用的胶水多种多样,应用广泛,不 同的装置使用不同的胶水来制作胶水。 所以各种胶水也使胶机更加通用。 目 前,由于电子胶水优于其他普通胶水的优势,已经获得了许多世界一流品牌, 发展潜力巨大。
所设计的结构属于三轴自动点胶机,而三轴平台经过我国多年的发展已经 非常成熟,厂家也很多,所以价格不贵,但精度不高。 平均胶水生产商可以 购买这个通用品牌。 但也有很多高科技企业的分配机精度要求非常高,国内 大部分厂商都被排除在外,所以只有引进国外知名品牌才能满足自己的需求。 因此,在竞争激烈的国际点胶机市场,市场依托高品质和优质的售后服务,使 您在世界上站稳脚跟。
对于双套液体分配机,远在国内市场成熟,国外市场也有很大的需求,可 以说是一个新的领域,具有很大的潜力,做出我们努力的目标之一。
……



















 751
751

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









