







 本文探讨了玻璃清洁机器人面临的挑战和解决方案,通过改进行走、转向和清洗机制,提出了一种以轮式自主移动机器人为基础的成熟设计。设计考虑了市场需求,旨在提高效率并降低清洗成本。
本文探讨了玻璃清洁机器人面临的挑战和解决方案,通过改进行走、转向和清洗机制,提出了一种以轮式自主移动机器人为基础的成熟设计。设计考虑了市场需求,旨在提高效率并降低清洗成本。
摘 要
由于各种因素的影响,市场上玻璃清洁机器人的技术还处于初级阶段,在实际运用中还存在诸多问题。本次设计通过研究玻璃清洁机器人的工作原理及过程,经过详细的方案规划,反复论证方案,找出一种目前技术上最成熟、最符合实际运用的运动方案。
本文介绍了解决目前玻璃幕墙难于清洗这一难题的玻璃清洁机器人的研究,设计,运用方案,并把其中一种我们认为是目前最合理,最具有市场前景的设计方案进行详细规划及分析,反复对方案进行认证,逐步进行修改及优化.确定玻璃清洁机器人以轮式自主移动机器人为载体.最终完成玻璃清洁机器人的结构设计、机构各种参数计算和分析、相关零件材料的选用及工艺分析。
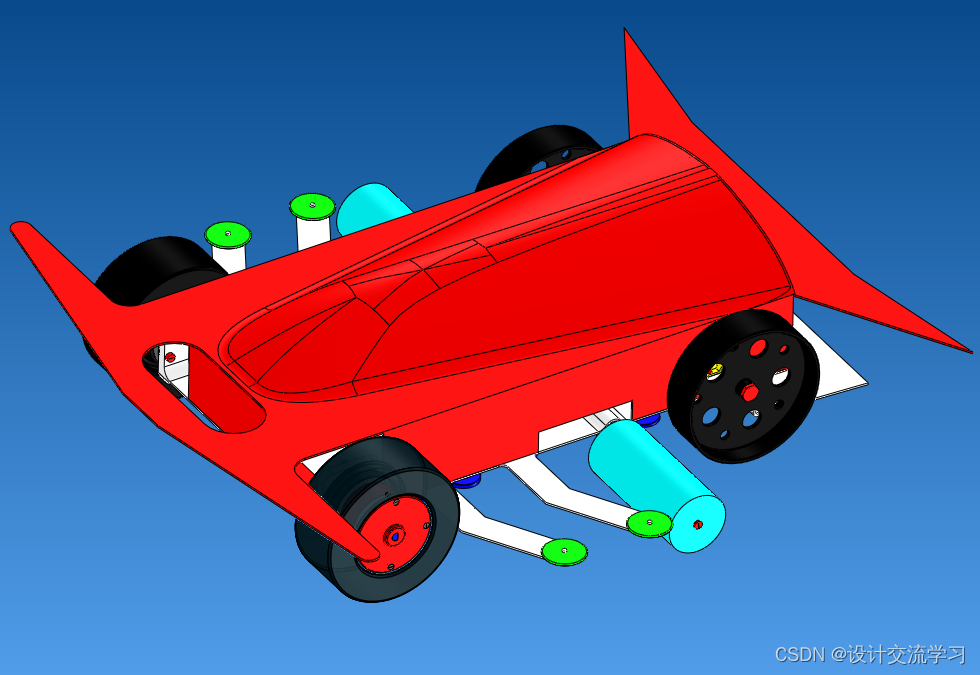
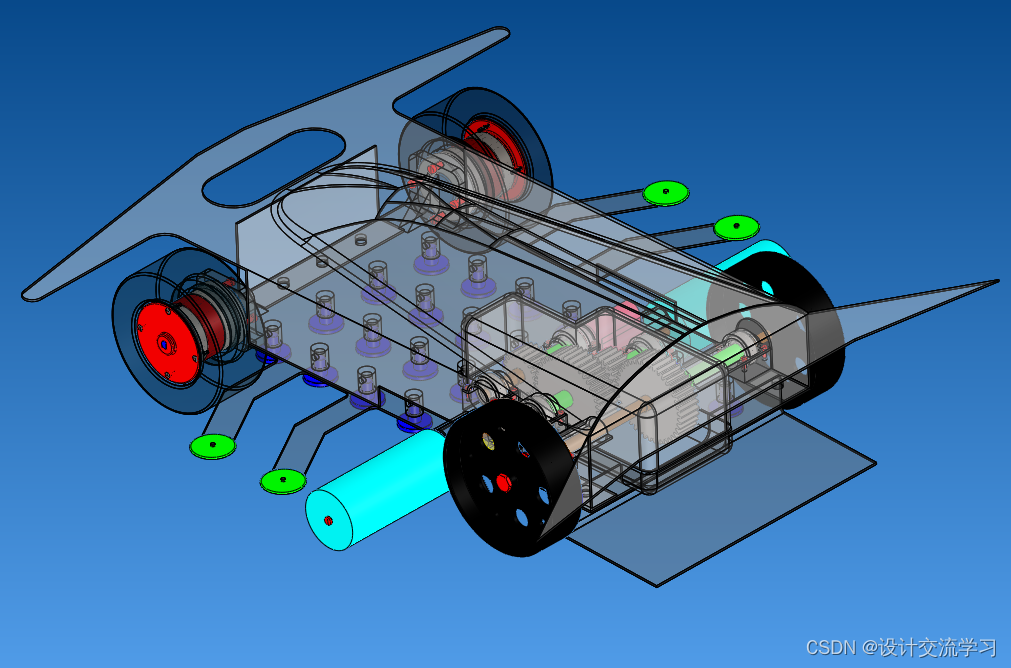
从玻璃清洁机器人在玻璃墙壁上的行走机构,转向和自动避障机构,自动清洗机构三个模块详细阐述了机器人系统的工作原理和实现方法.玻璃清洁机器人的工作原理是利用两对传动齿轮将驱动电机上的力矩传递到驱动轴上,从而带动两个后轮转动,实现机器人在玻璃墙壁上的自由行走.机器人的两个前轮均采用嵌入式直接驱动装置,在机器人正常直线行走时为机器人提供一定的牵引力,在机器人遇到障碍物时则一个电机正转,一个电机反转,实现机器人的零转弯半径转向.清洗机构为滚桶式,由驱动电机提供动力,并且中间无减速机构,即滚筒的转速与驱动电机的转速相同。
通过在已有的方案基础上进行创新设计,使得设计出来的玻璃清洁机器人更能满足用户的需求,以此拓展它的市场前景。
关键词:轮式;玻璃;滚筒;嵌入式直接驱动装置;正反转
Abstract
Because of the influence of various factors, glass cleaning robot technology is still in its infancy in the market, there are lots of problems in practice. This design through the study of working principle and process of glass cleaning robot, through the detailed program planning, repeated demonstration project, to find out a kind of the most mature on the technology at present, the most practical use of motion scheme.
Researching, designing, using the scheme of glass cleaning robot to solve the glass curtain wall is difficult to clean are introduced in this paper,and the one we think is the most reasonable, most has the market prospect of detailed planning and analysis has been made to the design, repeated authentication scheme, modify and optimize step by step. Finally determine the glass cleaning robots with wheeled autonomous mobile robot as the carrier, and finishing glass cleaning robot structure design, calculation and analysis of various parameters, material selection of parts and process analysis.
This article from the travel mechanism of glass in glass wall cleaning robot, steering and automatic obstacle avoidance mechanism,automatic cleaning mechanism three modules in detail elaborated the working principle and realization method of the robot system. Glass cleaning robots working principle is to use two pairs of gear drives the torque on the machine, is passed on to the drive shaft to drive the two rear wheels turning, to realize robot walking on the glass wall of freedom. The robot's two front wheels adopts embedded direct drive device, in the robot walking straight and normal provide certain traction force for robot, in the robot meet with obstacles is a motor forward, a motor reversal, realize zero turning radius turn of the robot. Cleaning mechanism is barrel type, provided by the drive motor power, and the middle without retarding mechanism, namely the rattler at the same speed with the speed of the drive motor.
Through innovative designing based on the existing solutions, makes the designed glass cleaning robot can meet the needs of users, to expand its market prospects.
Key words: wheel;glass;rattler;embedded direct drive device;pros and cons go
目 录
1 引言
1.1 课题研究的背景
在繁华的市中心区域,高层建筑越来越多,样式多样的摩天大楼成为现代都市中一道亮丽的风景。随着玻璃制作工艺技术的不断革新,玻璃的强度不断提高,并且玻璃的采光性好,保温防潮性能好,彩色玻璃实用美观,建筑师在设计时高层建筑的外壁越来越多地采用钢化玻璃制作玻璃幕墙结构。但是由于玻璃没有自我清洁的能力,时间一长,空气中悬浮颗粒就会吸附于玻璃外墙上,为了保证建筑外观的整洁美观,就需要对墙壁进行清洗,以美化城市市容市貌。玻璃幕墙难于清洗,清洗成本高昂,清洗工作量大并且清洗工人工作环境危险等难题。因此,面对市场对于清洗玻璃建筑的巨大需求, 市场上目前投入使用的少量玻璃清洁机器人,技术上仍然存在许多的问题,例如:避障时机器人的转弯半径过大,机器人无法清洗机器人边缘经过的玻璃墙面,机器人轮子传动轴径向力过大等问题,因此开发一款用于自动清洗玻璃幕墙的满足市场需求的实用玻璃清洁机器人已经成为科研人员工作的重点。
目前高层建筑的玻璃幕墙清洗工作主要由专门的清洁公司来完成,清洁公司的清洁方法中最主要的有两种:一种方式是使用安装在高楼楼顶的专用轨道或吊索系统将清洁机器对准窗户进行自动擦洗。这种清洗方式初次投资成本较高,而且要求建筑物设计之初就必须考虑到擦窗系统的安装,所以限制了它的使用范围。另一种方式是使用升降平台或者吊篮装载清洁工进行高楼玻璃幕墙的清洗,虽然简便易行,但清洁工人的劳动强度大,工作效率又比较低,属于高空危险作业,对工人的人身安全及高楼玻璃幕墙壁面都有很大的威胁,并且中国的经济正处在转型期,现在和可以预见的未来清洁工人的用工成本将不断的上升。所以迫切需要一种能代替人而且又有一定灵活性和适用性的全自动机器装置来完成这项工作,而且高楼的玻璃幕墙一般情况下面积较大,大多数处于几十米甚至位于上百米的高处,而且周围又无可攀援的支架,这就使得对玻璃幕墙的清洗成为一项繁重、高危险、耗资的工作。如果让人去清洗玻璃壁面,不仅花费高,而且安全难以得到保证。特别是目前一些国家和地区已经通过立法对包括擦窗作业在内的人工高空攀爬进行了限制,人们不得不寻找其它解决办法。
美日韩及欧洲各国还有最近的中国都相继推出了各自的玻璃清洁机器人,这项技术也在日益走向成熟,但却并未为大多数人了解,许多相关的技术在外人看来还是遥不可及的,在网络及出版物中相关的文章少之又少,这就需要对这一新型的技术进行一些说明。
……


















 371
371

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









