







 本文研究了马铃薯机械化收获中的重要环节——杀秧机,针对中西部地区劳动力短缺问题,介绍了一种适合当地种植模式的甩刀式马铃薯杀秧机。文章详细分析了国内外现状、存在的问题,并进行了整体设计、主要部件设计和运动学分析,旨在提高收获效率并解决茎秧缠绕机器的问题。
本文研究了马铃薯机械化收获中的重要环节——杀秧机,针对中西部地区劳动力短缺问题,介绍了一种适合当地种植模式的甩刀式马铃薯杀秧机。文章详细分析了国内外现状、存在的问题,并进行了整体设计、主要部件设计和运动学分析,旨在提高收获效率并解决茎秧缠绕机器的问题。
前 言
近年来,我国中西部地区马铃薯种植面积逐年增加,而广大农村劳动力向城市转移,劳动力短缺使农民对马铃薯机械化收获需求日益增大。机械化收获马铃薯可以大大减轻农民劳动强度,降低生产成本,提高马铃薯收获效率。马铃薯收获前使用杀秧机科学杀秧是保障机械化收获的重要前提之一。通过收获前的杀秧,可使收获机的负荷减小,行驶速度加快,故障率降低,收获机内部的薯秧分离器的负荷也会大大降低,薯秧分离效果也会显著提高。因此,研制一种能将马铃薯茎秧有效打碎,使收获过程中不出现壅堵、不出现茎蔓缠绕机器杆件等问题的杀秧机具有重要的现实意义。
参考国内外关于马铃薯杀秧机的文献资料,根据我省马铃薯种植模式和收获的实际情况,并通过实地进行观察马铃薯收获时茎秧缠绕机器杆件的技术问题,研制了一种甩刀式马铃薯杀秧机,该机适合于甘肃旱作农业区垄作马铃薯种植模式。本文主要从以下几方面进行了研究:
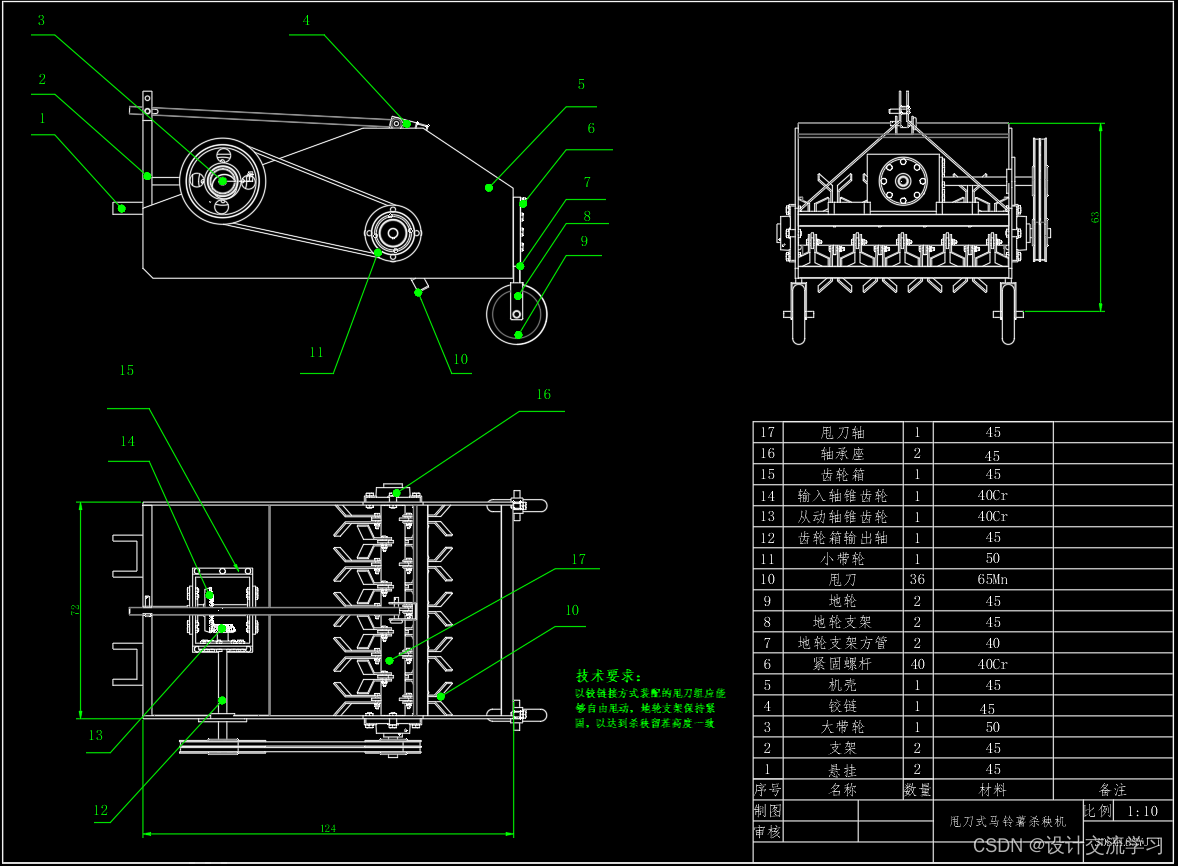
- 系统分析了国内外马铃薯杀秧机的发展概况,根据马铃薯杀秧机的主要功能及农艺要求,开展了甩刀式马铃薯杀秧机的总体设计,提出了杀秧机工作行数2行、工作幅宽为1000mm等总体性能指标。
- 对甩刀式马铃薯杀秧机主要部件进行设计与分析。确定了传动装置、甩刀及轴、行走轮、外壳体等部件的结构参数,计算出了传动系统的传动比,设计出了齿轮箱的锥齿轮、甩刀、轴、V带和带轮以及张紧装置等主要部件。
- 建立了马铃薯杀秧机甩刀模型,从理论上进行运动学分析,对甩刀的形状、数量、排列和运动进行理论分析,确定了其结构及主要参数,甩刀的数量为 36把,采用双 L型刀片 ,交错平衡排列方式,对刀轴的平衡进行了分析 ;估算出甩刀轴转速应大于等于1299r/min,并对甩刀切割进距设计的合理性进行了验证。
关键词:马铃薯;杀秧机;三维设计
目 录
2.2设计思想 3
3.4杀秧机行走轮及机架的设计 10
总 结 13
1绪论
1.1课题研究的意义
马铃薯是粮、菜、饲、加工兼用型农作物,其适应性广、丰产性好、营养丰富、经济效益高,已成为世界上继水稻、小麦和玉米之后的第四大粮食作物[1]。根据世界联合国粮农组织统计,全世界马铃薯种植面积达到1833万公顷,3.2958亿吨,我国马铃薯种植面积为475.26公顷,马铃薯产量为6905.97万吨,占世界马铃薯种植面积的27.2%,亚洲种植面积的56.3%,是全世界马铃薯种植面积最大的国家之一[2]。近几年来,国内马铃薯种植面积也在稳步增长。随着国内马铃薯种植面积逐年增加,农村劳动力短缺,农民对马铃薯种植、收获机械的需求越来越大[3]。目前,国内外研制的大部分马铃薯收获机,在收获前不杀秧,在作业过程中,马铃薯茎秧缠绕机器杆件,行进阻力增大、容易壅堵,导致机具动力消耗增大[4],影响马铃薯的挖掘。因此,马铃薯在收获之前,须对地表的茎秧进行处理,然后再机械收获马铃薯。马铃薯茎秧可通过化学或人工的方法将其除去,化学杀秧会污染环境和土壤;马铃薯茎秧人工清除工作量大、效率低,影响马铃薯机械收获。马铃薯收获前机械杀秧可使马铃薯块茎的表皮充分木栓化,与茎秧分离更加容易,表皮老化可显著减少收获、运输和贮藏中的损伤;还可提高马铃薯收获效率,保证马铃薯机械收获顺利进行[5]。近几年来我国马铃薯机械化作业虽然有了较快的发展,但是,我国在中小型马铃薯种植和收获机方面的机具较多,而马铃薯杀秧机的机型较少。国外生产的马铃薯杀秧机各类产品,体积结构庞大,工作幅宽大,零配件供应渠道不畅通,在我国地区适应性差[6],难以适应我省马铃薯种植大多分布在小地块、山地和水平梯田上的现状。因此,为了减轻打秧劳动强度,解决马铃薯挖掘过程中茎秧缠绕机器出现堵塞的问题,提高马铃薯收获机后续挖掘的工作效率,使马铃薯机械收获顺利进行,研制一种能有效打秧并适合我省实际情况的马铃薯杀秧机具有重要意义。
……
……



















 425
425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









