







 本文介绍了一种设计用于攀爬变直径直杆的机器人,采用简单机构如曲柄滑块和凸轮,配备弹簧夹紧和轻质电机,旨在解决小直杆作业难题。通过运动分析和结构稳定性校核,确保机器人稳定可靠。此外,文章还详细探讨了机械设计、减速箱选择、零件加工工艺等内容。
本文介绍了一种设计用于攀爬变直径直杆的机器人,采用简单机构如曲柄滑块和凸轮,配备弹簧夹紧和轻质电机,旨在解决小直杆作业难题。通过运动分析和结构稳定性校核,确保机器人稳定可靠。此外,文章还详细探讨了机械设计、减速箱选择、零件加工工艺等内容。
摘 要
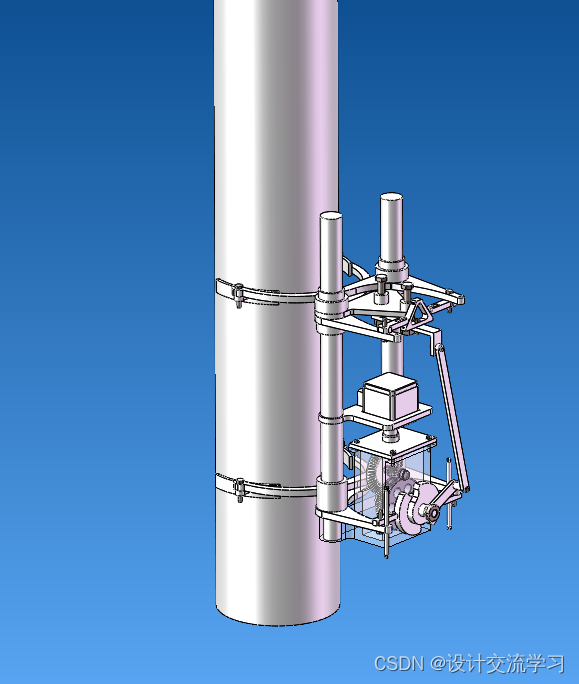
在一些工程类建筑中,一些直径比较小的直杆随处可见,对于这些直杆作业一直存在着一些问题,人为作业较为困难和危险。设计一个可攀爬直杆的机器人,通过该机器人平台搭载一些作业机器,对于解决小直杆的作业问题具有较大现实意义。
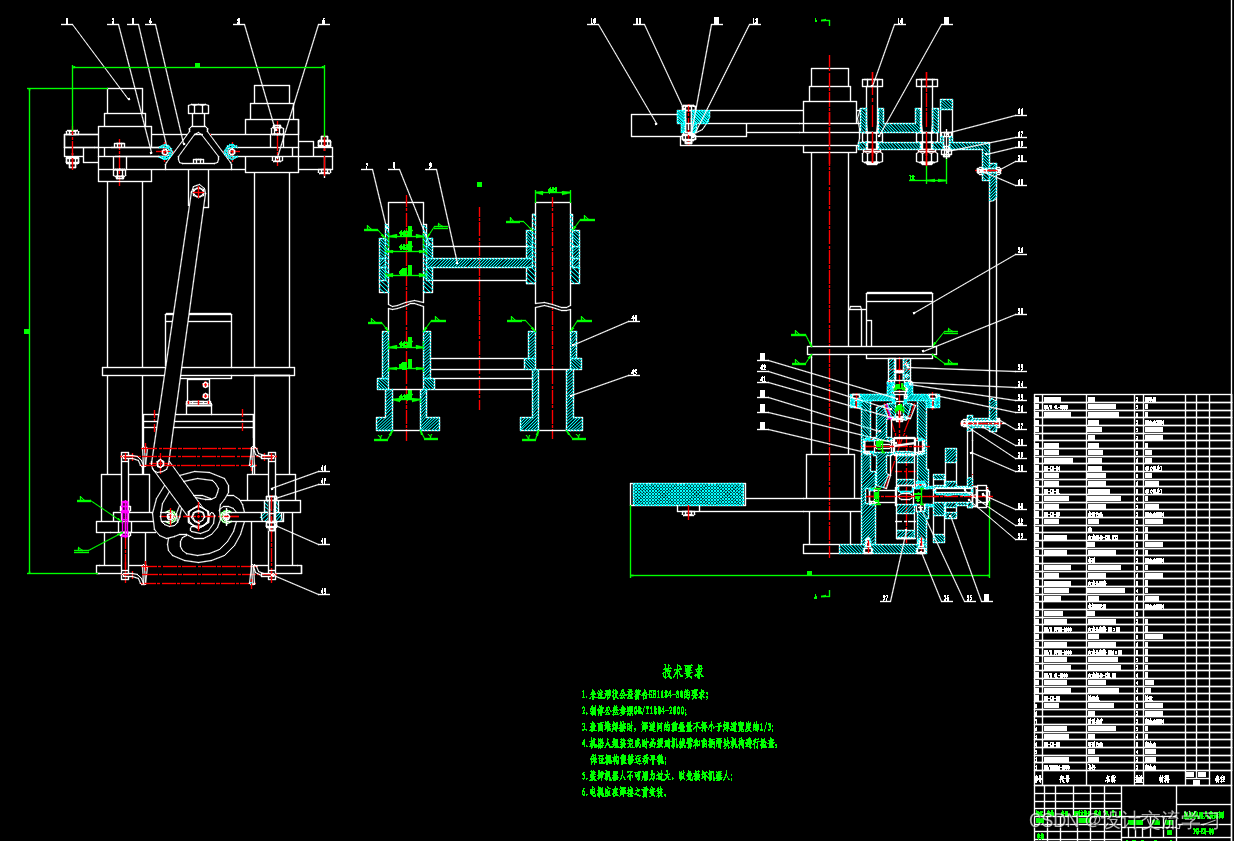
本次设计的攀爬机器人是由众多简易的机构组成,在结构上面比较简单,利用我们平时生活中随处可见的曲柄滑块机构、凸轮机构等等结合而成。利用凸轮结构的运动特性实现手爪的夹紧与松开,在驱动源方面只采用一个轻质电机,避免电机过多造成结构上的繁琐和避免重量过重。机械手的手爪采用的是弹簧夹紧的原理,弹簧提供的力足够支撑整个机器人的自重和负重。通过弹簧解决了在变直径杆上攀爬的问题。
本文对曲柄滑块的运动和受力分析证明了该机器人运动的稳定性和可靠性。还通过减速箱的设计赋予机器人一定的攀爬运动速度。还对手爪、轴、轴承等部件的受力校核证明该机器人在结构上面的稳定性。该机器人还具有一定的负重能力。可以在机器人上面搭载一些作业机器人,实现多功能作业。本次设计的机器人通过各机构联动工作,工作简单可靠。
本文还对输出轴的尺寸、配合进行了说明。对轴的加工工艺进行了工艺规程制定,分析各工序的制定方法。对于轴类零件的加工工序有一定的了解与掌握。
关键词:爬杆机器人;变直径杆;夹紧;曲柄滑块
Abstract
In some of the engineering building, a number of relatively small diameter straight bar everywhere, straight bar for these jobs, there has been some problems, man-made work more difficult and dangerous. Design a robot can climb straight bar, equipped with some of the work machine by the robot platform for solving the problems of small jobs straight bar has a larger significance.
The climbing robot designed by many simple bodies, in the above structure is relatively simple, we usually use slider-crank mechanism life everywhere, the cam mechanism, and so a combination. Using the motion characteristics of the cam mechanism to achieve clamping and release the gripper, in terms of the driving source using only a lightweight damping motor to avoid the motor caused by excessive red tape and avoid excessive weight on the structure. Robot gripper uses the principle of a spring clamp, the spring force provided enough to support its own weight and the weight of the whole robot. By spring solves the problem of variable diameter pole climbing.
In this paper, the crank-slider motion and stress analysis to prove the stability and reliability of the robot movement. Also gives some climbing robot movement speed by gearbox design. Also force the opponent claw, shafts, bearings and other parts of the check show that the stability of the structure above the robot. The robot also has a certain weight-bearing capacity. Some jobs may be mounted on top of the robot in robot to achieve mufti-functional operations. The robot design work through the linkage mechanism, work is simple and reliable.
This paper also the size of the output shaft, with the described. Axis machining process were to develop process planning, analysis of the development method in each step. For shaft machining operations have a certain understanding and grasp.
According to the axis of the development process card. Reasonable and feasible production process planning.
Keywords: pole-climbing robots; variable diameter rod; clamp; crank-slider
目 录
机器人的起源要追溯到3000多年前,但是从60年代以后机器人技术得到飞速的发展。经过50来年的研发和使用,机器人已经进入新的时代了。机器人在过去只是工业机械手,但是现在我们已经重新定义,机械手只是其中机器人中的一部分了,现在我们所说机器人是新型的、新一代的,可以协作的,还有服务型的机器人,包括医疗、服务、家庭、康复等等方面可以为人类解决有难度或有危险的问题。
人们的生活越来越好,越来越多的地方城市化率增高,高楼林立,街道四通八达。我们平常经过道路时可以看到好多树立的电线杆、电灯杆、广告牌立柱等等圆柱形直杆。但是由于直杆在室外遇到各种环境问题或者人为因素,常常需要环卫工人清洗或者相关人员维修。在清洗一些高空建筑时如果采用人工清洗具有很大的危险性。对于电线杆等直径比较大的直杆,通过人工攀爬作业比较方便,也可以采用工程车工作。都但是一些直接比较小的直杆,就像我们在生活中见到的一些装路灯的直杆,如果通过人工攀爬上去工作比较困难。采用工程车进行作业的话,作业成本较高,在拥挤狭小的路段作业比较困难。研发一些攀爬类的机器人就变的尤为重要了。
爬杆机器人的研究需要机械设计,电子设计,软件工程、材料科学、以及仿生学等一些列基础学科融合交汇。需要进行线性、非线性模型计算。可以利用传感器等信息控制,三维建模分析和仿真运动。
…………



















 634
634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









