







 本文研究了真空吸盘上料机械手在机械工业中的应用,介绍了其结构特点和关键技术,如旋转关节、真空吸盘设计、液压缸与小臂大臂结构。着重讨论了自动化如何减少工人劳动强度,提高生产效率并降低工伤率,推动企业竞争力提升。
本文研究了真空吸盘上料机械手在机械工业中的应用,介绍了其结构特点和关键技术,如旋转关节、真空吸盘设计、液压缸与小臂大臂结构。着重讨论了自动化如何减少工人劳动强度,提高生产效率并降低工伤率,推动企业竞争力提升。
毕 业 设 计 中 文 摘 要
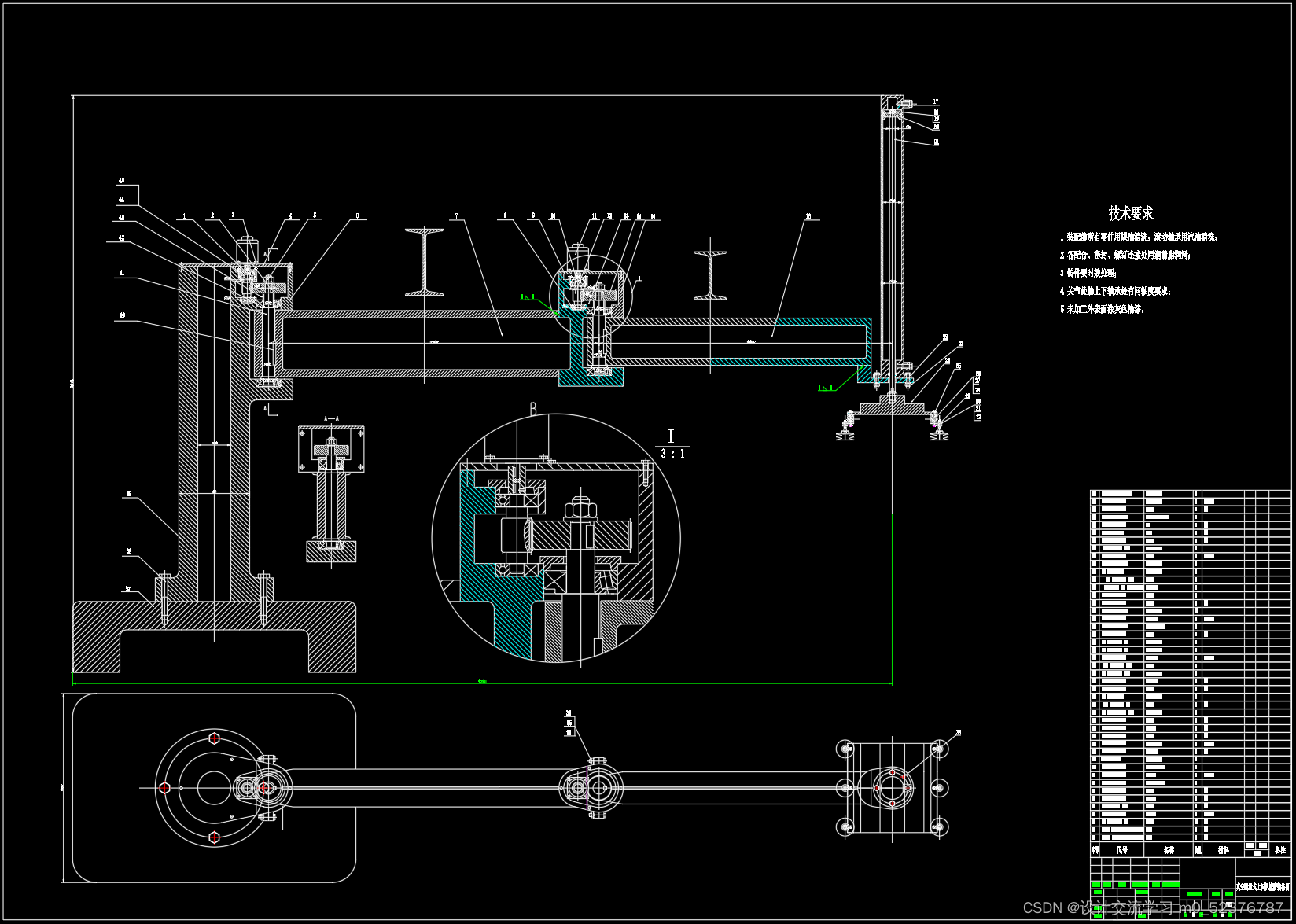
| 在当下生产过程中正在向机械化,与自动化方向发展。在机械工业中装卸、装配等环节中利用的机械手会越来越广泛。它可最大限度减少工人的劳动强度,改善产品的生产质量。真空式上料机械臂采用了两个旋转关节和一个运动关节; 两个回转关节完成x,y目标的运动,而移动关节则完成z目标的运动。 工业机械手是一种模仿人手的一部分抓举形式,按照事先设定好的程序,完成抓取、搬运工件等一系列运动。它在二十世纪五十年代就已经在工厂里工作了,是在搬运机械手的基础上成长起来的一种机器,开始主要实在上下料和搬运工件等工作形势中,随着运用领域的不段发展,当下主要用来夹持工具和完成大部分的作业。在当代生产中,它可以代替人大部分的工作量,改善工人的活动情况,提高生产效益。 关键词 机械手 真空式 搬运工件
|
毕 业 设 计 外 文 摘 要
| Title Electromechanical integration technology and its application Abstract IIn the current production process is to mechanization, and automation direction. In the machinery industry loading and unloading, assembly and other aspects of the use of the robot will be more and more widely. It can minimize the labor intensity of workers, improve product quality of production. The vacuum feed robot uses two rotating joints and a moving joint; the two revolving joints complete the movement of the x, y target, and the moving joint completes the movement of the z target. Industrial robots are a part of the snatching of the human hand, in accordance with the pre-set procedures, complete the crawl, handling parts and a series of sports. It was in the fifties of the twentieth century has been working in the factory, is moving on the basis of the robot to grow up a machine, began to mainly up and down and handling parts and other work situation, with the use of the field is not paragraph Development, the moment mainly used to hold tools and complete most of the operations. In contemporary production, it can replace the majority of the workload, improve the activities of workers, improve production efficiency. Key Words Manipulator Vacuum Handling parts |
目 录
1 绪论
1.1 真空吸盘上料机械手的定义
真空吸盘上料机械手是选择性的上下料机械臂。在x,y方向上有柔性,在使用在规格零件的上线料,如车间型材的上下料,以及零件的搬运。
生产商越来越追求工厂的自动化程度。随着生产技术的不断的更新,生产厂商对上下料机械手的需求量越来越大,上下料机械手要逐步完善产品生产的自动化的水平。
1.1.1加快企业铺设自动化生产线的进程
此设备装备到生产线中,可以大大加快企业自动化的进程,为企业在此行业中的发展起到了关键的作用。
1.1.2减少工人的劳动强度,提高工作效率
此设备可以减少工厂里面工人的数量,工厂逐渐走上无人化工厂,个人所创造的价值,大幅提高。
1.1.3减少工伤率,整体提高企业竞争力。
每年,因工伤致残的人都有,而车底消除此类隐患,就是实现企业的无人化,这样也能够提升企业在行业中的竞争力。
…………


















 623
623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









