







 本文探讨了我国机器人研究现状,重点介绍了Delta并联机器人设计,包括机械设计特点、组成部分、自由度分析和机械传动装置选择。文章深入研究了三自由度Delta机器人运动学,构建了运动学模型,进行了正反向运动学分析,并提供了仿真方法。
本文探讨了我国机器人研究现状,重点介绍了Delta并联机器人设计,包括机械设计特点、组成部分、自由度分析和机械传动装置选择。文章深入研究了三自由度Delta机器人运动学,构建了运动学模型,进行了正反向运动学分析,并提供了仿真方法。
目录
摘要
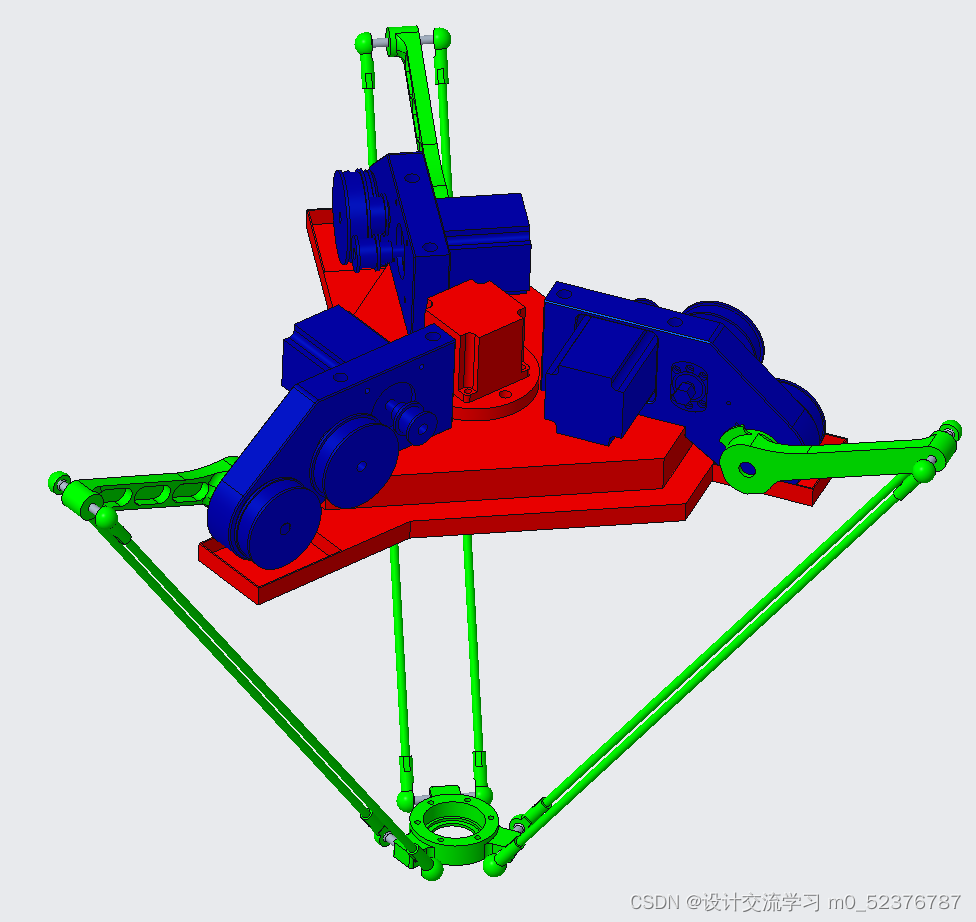
并联机器人是人类全新的机器人,它具有刚度大!承载能力强!精度高!自重负荷比小!动力性能好等一系列优点,与目前广泛应用的串联机器人在应用上构成互补关系,因而扩大了机器人的应用领域"Delta并联机器人是最典型的空间三自由度移动的并联机构,Delta机构整体结构简单!紧凑,驱动部分均布于固定平台,这些特点使它具有良好的运动学和动力学特性,实验条件下末端控制加速度可高达5.09-(重力加速度)"大量的实践证明,Delta机构是迄今为止设计最成功的并联机构之一"目前,Delta并联机器人己经广泛应用于化妆品!食品和药品的包装和电子产品的装配"机器人的运动学是机器人动力学!机器人控制和规划的基础,在机器人研究中占有重要的地位"运动学研究内容包括正向运动学和反向运动学,对于并联机器人,其反向运动学相对简单而正向运动学复杂"本文对三自由度Delta机器人运动学进行了研究"通过对Delta机器人结构的分析,建立了运动学模型,确定了各个构件的空间位姿"基于动平台与静平台之间的矢 量关系以及机构的约束方程,建立了该机构的运动学方程,推导出位置反解公式,同时给出了位置正解的数值解法"在位置反解方程的基础上,分析了Delta机器人的工作空间,推导出该机构的雅可比矩阵,并对速度和加速度进行了求解.。
关键词: 机器人,方案,设计,仿真
…………



















 203
203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









