






一、基本原理
动态规划算法是一个多阶段的决策过程,每一步求解的问题都是后面阶段求解问题的子问题,每一步决策将依赖于以前步骤的决策结果。
二、适用条件
问题要满足优化原则或者最优子结构性质,也就是一个最优决策序列的任何子序列本身相对于子序列的初始和结束状态一定是最优决策序列。
三、使用动态规划解决货郎问题
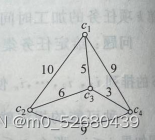
设有m个城市,已知任何两个城市之间道路的距离。一个货郎需要到每一个城市巡回卖货,从某一个城市出发,每个城市恰好经过一次,最后回到出发的城市,问:怎样走使得总的路程最短?
def tsp_dynamic_programming(graph):
n = len(graph)
# dp[mask][i] 表示从城市0出发,已经访问过mask中的城市,当前在城市i的最短路径长度
dp = [[float('inf')] * n for _ in range(1 << n)]
dp[1][0] = 0 # 初始状态,从城市0出发,访问过城市0
for mask in range(1, 1 << n):
for u in range(n):
if (mask >> u) & 1:
for v in range(n):
if v != u and (mask >> v) & 1:
dp[mask][u] = min(dp[mask][u], dp[mask ^ (1 << u)][v] + graph[v][u])
# 最后一步,回到城市0
mask = (1 << n) - 1
min_cost = min(dp[mask][v] + graph[v][0] for v in range(1, n))
return min_cost
if __name__ == "__main__":
# 示例输入:城市之间的距离矩阵
distance_matrix = [
[0,10,5,9],
[10,0,6,9],
[5,6,0,3],
[9,9,3,0]
]
min_distance = tsp_dynamic_programming(distance_matrix)
print("最短路径长度为:", min_distance)














 5838
5838











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









