








问题定义
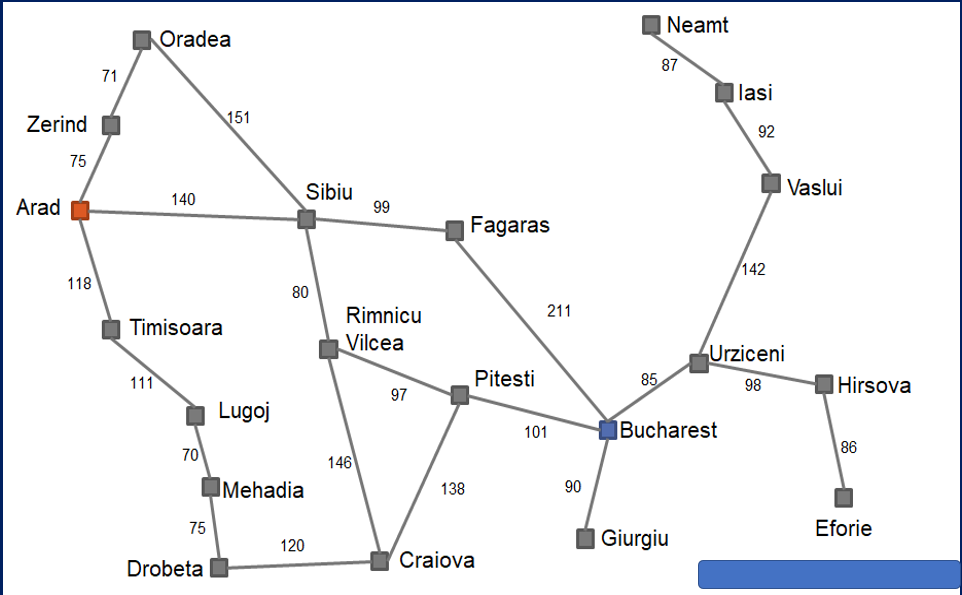
本实验要求用广度优先算法、深度优先算法、贪婪算法和AStar算法求解“罗马尼亚度假问题”,即找到从初始地点 Arad 到目的地点 Bucharest 的一条最佳路径。
一些重要点
广度优先搜索
def widthFirstSearch(self):
startNode = Node()
endNode = Node()
for i in self.graph.nodes:
if i.name == self.start:
startNode = i
if i.name == self.end:
endNode = i
close = []
open = deque()
open.append(startNode)
while open:
city = open.popleft()
if city not in close:
close.append(city)
if city == endNode:
# print("宽度搜索路径为:")
# self.printPath(close)
# print("宽度搜索close表为:")
# for i in close:
# print(i.name, end=" ")
self.close_width = close
self.open_width = open
return
for i in city.next:
for j in self.graph.nodes:
if i[0] == j.name:
i = j
if i not in open and i not in close: # 结点i既不在open表 又不在close表,代表它没有被访问过,
i.prev = city # 广度优先搜索只访问一次结点
open.append(i) # 只有没有被访问过的邻居,我们才将它加入open表中进行下一步操作
while i.prev:
for j in i.next:
if j[0] == i.prev.name:
i.gn = j[1] + i.prev.gn
i = i.prev
break
break
深度优先搜索
只更新不在close表里的结点
def deepFirstSearch(self):
startNode = Node()
endNode = Node()
for i in self.graph.nodes:
if i.name == self.start:
startNode = i
if i.name == self.end:
endNode = i
close = []
open = [] # 模拟堆栈
open.append(startNode)
while open:
city = open.pop()
if city not in close:
close.append(city)
if city == endNode:
self.close_deepth = close
return
for i in reversed(city.next): # 从小到大放入,因为cities表是从小到大
for j in self.graph.nodes:
if i[0] == j.name:
i = j
if i not in close:
i.prev = city
open.append(i)
while i.prev:
for j in i.next:
if j[0] == i.prev.name:
i.gn = j[1] + i.prev.gn
i = i.prev
break
break
贪婪算法
从起点开始搜索每一个相邻城市,保存下前驱结点和走过的路径长度 g(n), 如果走到重复结点,则判断 g(n)的大小进行前驱结点的更新。(类似Dijkstra算法)
def greedSearch(self):
startNode = Node()
endNode = Node()
for i in self.graph.nodes:
if i.name == self.start:
startNode = i
if i.name == self.end:
endNode = i
close = []
open = deque()
open.append(startNode)
while open:
open = sorted(open, key=functools.cmp_to_key(self.compareValue))
# open.sort(key=functools.cmp_to_key(self.compareValue))
city = open.pop()
if city not in close:
close.append(city)
if city == endNode:
# print("\n贪婪搜索路径为:")
# self.printPath(close)
# print("贪婪搜索close表为:")
# for i in close:
# print(i.name, end=" ")
# print("\n搜索总代价为:", close[-1].gn)
self.close_greed = close
return
for i in city.next:
for j in self.graph.nodes:
if i[0] == j.name:
cost = i[1]
i = j
if i not in open and i not in close:
i.prev = city # 更新前置结点之前判断是否路径更佳,而不是简单的判断是否被访问
open.append(i) # append是浅拷贝
while i.prev:
for j in i.next:
if j[0] == i.prev.name:
i.gn = j[1] + i.prev.gn
i = i.prev
break
elif i.gn > (city.gn + cost):
i.prev = city # 更新前置结点之前判断是否路径更佳,而不是简单的判断是否被访问
open.append(i) # append是浅拷贝
while i.prev:
for j in i.next:
if j[0] == i.prev.name:
i.gn = j[1] + i.prev.gn
i = i.prev
break
break
A*算法
通过 f ( n ) = g ( n ) + h ( n ) f(n) = g(n) + h(n) f(n)=g(n)+h(n) 这个函数来计算每个节点的优先级。
其中:
•f(n)是节点n的综合优先级。当我们选择下一个要遍历的节点时,我们总会选取综合优先级最高(值最小)的节点。
•g(n) 是节点n距离起点的代价。
•h(n)是节点n距离终点的预计代价,这也就是A*算法的启发函数。
def AstarAlgorithm(self):
# 计算城市图每个点到终点城市的距离,获取h(n):节点n距离终点的预计代价,也就是A*算法的启发函数
distance = {}
startNode = Node()
endNode = Node()
for i in self.graph.nodes:
distance[i.name] = math.sqrt(pow(i.point[0] - self.cities[self.end][0][0], 2) + \
pow(i.point[1] - self.cities[self.end][0][1], 2))
if i.name == self.start:
startNode = i
if i.name == self.end:
endNode = i
close = []
open = deque()
open.append(startNode)
while open:
# 对open表排序
open = deque(sorted(open, key=functools.cmp_to_key(self.compareNode)))
city = open.popleft()
# city结点不在close里面则放入city表
# city结点拥有最小的fn值
if city not in close:
close.append(city)
if city == endNode:
# print("\nA*搜索close表为:")
# for i in close:
# print(i.name, end=" ")
# print("\nA*搜索路径为:")
# self.printPath(close)
# print("\n搜索总代价为:", close[-1].gn)
self.close_Astar = close
return
else:
for i in city.next:
for j in self.graph.nodes:
if i[0] == j.name:
cost = i[1]
i = j
if i not in open and i not in close:
# 判断是否被访问
i.prev = city
# print(f"{i.name}<-{city.name}")
open.append(i)
# 计算当前结点到起点已经走过的代价并且加上欧式距离 获取f(n)=g(n)+h(n)
# g(n):节点n距离起点的代价 这个代价是已知的,只需要把走过的路花费的代价加起来
while i.prev:
for j in i.next:
if j[0] == i.prev.name:
i.gn = j[1] + i.prev.gn
i.fn = i.gn + distance[i.name]
i = i.prev
break
elif i.gn > (city.gn + cost):
i.prev = city # 更新前置结点之前还要判断是否路径更佳
open.append(i) # append是浅拷贝
while i.prev:
for j in i.next:
if j[0] == i.prev.name:
i.gn = j[1] + i.prev.gn
i.fn = i.gn + distance[i.name]
i = i.prev
break
break
数据结构
open表,close表,数据字典 cities
# cities是一个字典 第一个表示城市坐标,第二个list表示相邻城市及其路径权重
self.cities = {'A': [(91, 492), [['Z', 75], ['T', 118], ['S', 140]]],
'B': [(400, 327), [['U', 85], ['G', 90], ['P', 101], ['F', 211]]],
'C': [(253, 288), [['D', 120], ['P', 138], ['R', 146]]],
'D': [(165, 299), [['M', 75], ['C', 120]]],
'E': [(562, 293), [['H', 86]]],
'F': [(305, 449), [['S', 99], ['B', 211]]],
'G': [(375, 270), [['B', 90]]],
'H': [(534, 350), [['E', 86], ['U', 98]]],
'I': [(473, 506), [['N', 87], ['V', 92]]],
'L': [(165, 379), [['M', 70], ['T', 111]]],
'M': [(168, 339), [['L', 70], ['D', 75]]],
'N': [(406, 537), [['I', 87]]],
'O': [(131, 571), [['Z', 71], ['S', 151]]],
'P': [(320, 368), [['R', 97], ['B', 101], ['C', 138]]],
'R': [(233, 410), [['S', 80], ['P', 97], ['C', 146]]],
'S': [(207, 457), [['R', 80], ['F', 99], ['A', 140], ['O', 151]]],
'T': [(94, 410), [['L', 111], ['A', 118]]],
'U': [(456, 350), [['B', 85], ['H', 98], ['V', 142]]],
'V': [(509, 444), [['I', 92], ['U', 142]]],
'Z': [(108, 531), [['O', 71], ['A', 75]]]}
简单的结点类和图类:
class Node:
def __init__(self):
self.name = ''
self.point = (0, 0)
self.next = []
self.prev = None
self.fn = 0
self.gn = 0
class Graph:
def __init__(self):
# 所有结点构成图
self.nodes = []
算法测试与结果对比
时间测试类
import timeit
# 这个类用来进行算法的时间测试
class Test:
def __init__(self, test_times=100000):
# 默认测试100000次
self.test_times = test_times
self.t_wid = 0
self.t_deep = 0
self.t_greed = 0
self.t_astar = 0
def getTotalTime(self):
self.t_wid = timeit.timeit(stmt='gs.widthFirstSearch()',
setup='from __main__ import gs',
number=self.test_times)
self.t_deep = timeit.timeit(stmt='gs.deepFirstSearch()',
setup='from __main__ import gs',
number=self.test_times)
self.t_greed = timeit.timeit(stmt='gs.greedSearch()',
setup='from __main__ import gs',
number=self.test_times)
self.t_astar = timeit.timeit(stmt='gs.AstarAlgorithm()',
setup='from __main__ import gs',
number=self.test_times)
主程序入口
if __name__ == "__main__":
# 主程序入口
p = input("请输入起点和终点城市:").split()
start = p[0]
end = p[1]
gs = GraphSearch(start, end) # 第一个参数是起点城市名的首字母 第二个是终点城市名的首字母
gs.constructGraph() # 构建城市图
# 空间维度测试
len1 = []
print("--------------------------宽度优先搜索---------------------------")
gs.widthFirstSearch()
gs.printPath(gs.close_width)
a = gs.close_width[-1].gn
len1.append(a)
print("--------------------------深度优先搜索--------------------------")
gs.deepFirstSearch()
gs.printPath(gs.close_deepth)
a = gs.close_deepth[-1].gn
len1.append(a)
print("--------------------------贪婪算法搜索--------------------------")
gs.greedSearch()
gs.printPath(gs.close_greed)
a = gs.close_greed[-1].gn
len1.append(a)
print("--------------------------A*算法搜索--------------------------")
gs.AstarAlgorithm()
a = gs.close_greed[-1].gn
len1.append(a)
gs.printPath(gs.close_Astar)
# 时间维度测试 基于上方定义的gs对象
test = Test(test_times=10000)
test.getTotalTime()
# 画图
plt.rcParams['font.sans-serif'] = ['SimHei'] # 使图形中的中文正常编码显示
plt.rcParams['axes.unicode_minus'] = False # 使坐标轴刻度表签正常显示正负号
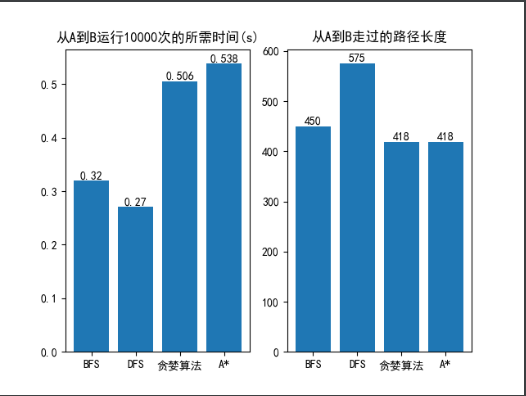
algorithm = ('BFS', 'DFS', '贪婪算法', 'A*')
time1 = [test.t_wid, test.t_deep, test.t_greed, test.t_astar]
plt.subplot(1, 2, 1)
plt.bar(algorithm, time1)
plt.title(f'从{start}到{end}运行{test.test_times}次的所需时间(s)')
for a, b in zip(algorithm, time1):
plt.text(a, round(b, 3), round(b, 3), ha='center', va='bottom')
# 路径对比
plt.subplot(1, 2, 2)
plt.bar(algorithm, len1)
for a, b in zip(algorithm, len1):
plt.text(a, b, b, ha='center', va='bottom')
plt.title(f"从{start}到{end}走过的路径长度")
plt.show()
程序执行效果
代码开源
以上全部代码都开源在了github上:https://github.com/Infinityay/SearchAlgorithm. 如果对你有帮助,希望能给我点个Star, 蟹蟹!
版权声明
本文首发自博客: 生有涯知无涯,转载请注明出处!
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









