







👨🏫🥰🥳需要机械臂相关资源的同学可以在我的主页中寻找哦🤖😽🦄


指南目录📖:
机械臂速成小指南(二十三):Paul方法求解机械臂运动学逆解(含matlab代码)
机械臂速成小指南(二十五):机械臂与人工智能的有机结合
🦾🌏🪐以下为正文🦾🌏🪐
一、感知与计算机视觉
(一)目标识别与定位
AI算法(如卷积神经网络CNN)处理摄像头、激光雷达或深度传感器的数据,帮助机械臂实时识别物体形状、位置和姿态(如工业分拣、无序抓取)。
(二)手眼协调
结合视觉反馈,机械臂动态调整动作(如装配、焊接或水果采摘),适应物体移动或环境变化。
(三)3D视觉引导
通过点云处理(如PointNet算法)实现复杂场景下的避障和精准操作(如物流拆垛)。
(四)案例
亚马逊仓库的Kiva机器人结合视觉AI分拣包裹;手术机器人达芬奇 (Leonardo's robot)利用视觉辅助医生操作。

二、运动规划与控制优化
(一)强化学习(RL)优化路径规划
AI通过试错学习高效、无碰撞的运动轨迹(如机械臂在密集货架中取货),减少人工编程需求。
(二)自适应控制
AI模型(如LSTM)预测外部扰动(如负载变化),实时调整控制参数,提升精度和稳定性。
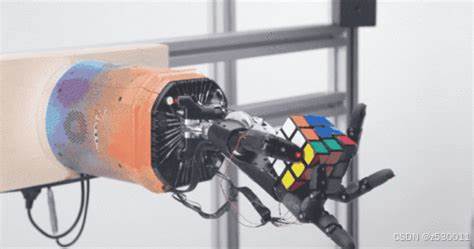
(三)模仿学习
通过人类示范数据训练机械臂复现复杂动作(如拧螺丝、绘画)。
(四)案例
OpenAI的Dactyl机械手通过RL自学魔方操作;波士顿动力Stretch机器人模仿人类搬运动作。
三、自主决策与协作
(一)多机协作
AI调度多台机械臂协同工作(如汽车生产线焊接与组装),通过通信协议(如ROS)实现任务分配。
(二)人机交互
自然语言处理(NLP)或手势识别让机械臂理解人类指令(如“把工具递给我”)。
(三)异常检测
AI(如异常检测算法)实时监控机械臂状态,预测故障并调整任务。
(四)案例
特斯拉工厂的机械臂通过AI协调完成整车装配;协作机器人(Cobot)UR5e与工人共享工作空间。

四、柔性操作与灵巧控制
(一)触觉反馈与力控
AI处理力/扭矩传感器数据,实现精细操作(如鸡蛋分拣、电路板插接)。

(二)可变刚度控制
模仿人类肌肉的柔性驱动(如仿生机械臂处理易碎物品)。
(三)案例
Shadow Robot的灵巧手结合AI实现穿针引线;软体机械臂用于医疗内窥镜操作。

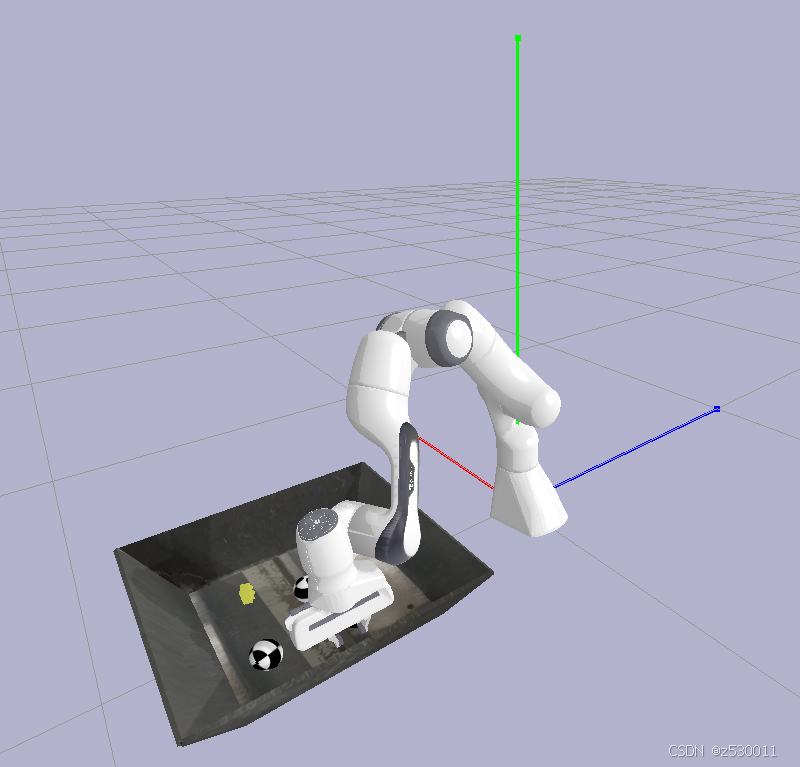
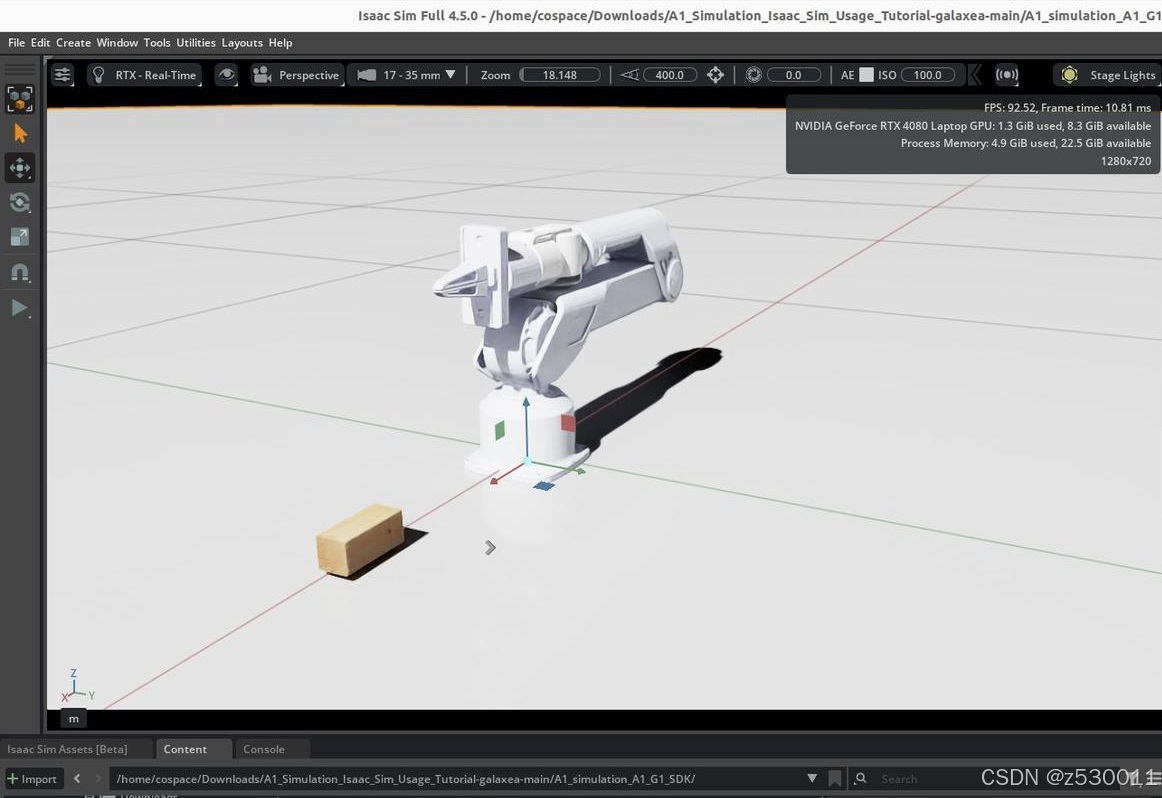
五、数字孪生与仿真训练
(一)虚拟训练场
在仿真环境(如PyBullet(是一个基于Bullet物理引擎的Python模块)、MuJoCo)中用AI训练机械臂,再迁移到现实(Sim-to-Real)。
(二)数字孪生监控
AI通过虚拟模型实时优化机械臂性能或预测维护需求。
(三)案例
使用NVIDIA Isaac Sim进行机器人仿真,训练机械臂抓取策略。
六、自学习与持续优化
(一)在线学习
机械臂在运行中持续优化算法(如自适应抓取不同形状物体)。
(二)迁移学习
将已训练模型迁移到新任务,减少数据需求(如从工业装配到医疗手术)。
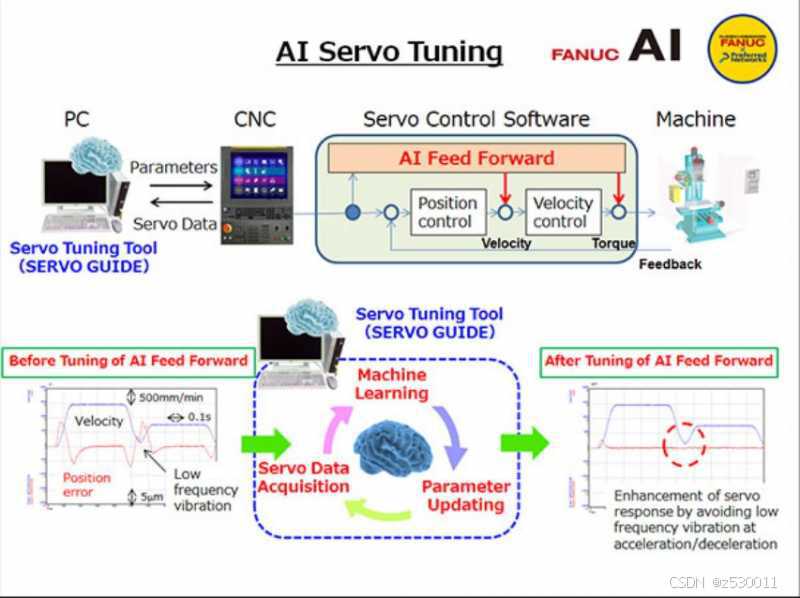
(三)案例
日本机床巨头发那科(Fanuc)与东京的创新企业“PreferredNetworks”合作的AI机器人通过共享云端数据学习新技能。
七、挑战与未来方向
-
实时性:边缘计算(如Jetson AGX)降低AI推理延迟。
-
数据效率:小样本学习(如元学习)减少训练数据依赖。
-
安全性:可信AI确保决策可解释(如医疗场景)。
-
伦理:人机协作中的责任与隐私问题。
随着AI模型(如Transformer、扩散模型(Diffusion Models))的进化,机械臂将具备更强的泛化能力和类人操作水平,同时将彻底改变机械臂的适用边界,成为智能物理系统的核心组件。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











