










前言:
如题,学生党想买一部二手机做逆向机,谷歌pixel1太贵,看来看去选了小米5,配置完后发一篇总结记录一下!

所用资源:
本文所用的所有资源:链接: https://caiyun.139.com/m/i?185CDNBiu8JRr 提取码: C2G0
教程:
1.解BL锁:
这个就不说了,网上有很多详细的教程,我买的二手机已经解锁完毕了。
2.刷入miui10底包,再刷入安卓原生Pixel系统(vPlus):
(这里先说一下我为什么选择刷pixel,我一开始其实刷的是最新版的LineageOS,但是安卓14太高了兼容很差,所以我又刷了个安卓10的LineageOS,但是动不动就自己关机还有网络功能时不时失灵,所以再换了pixel的安卓11版本也就是官网适配的最新版,目前感觉还不错,还有输入pixel必须要先刷MIUI开发版8.11.22 及之后的稳定版的底包,不过我实测MIUI开发版8.11.22不行,换10.2.2的稳定版可以,本文使用10.2.2稳定版本的底包)
(1)adb配置:
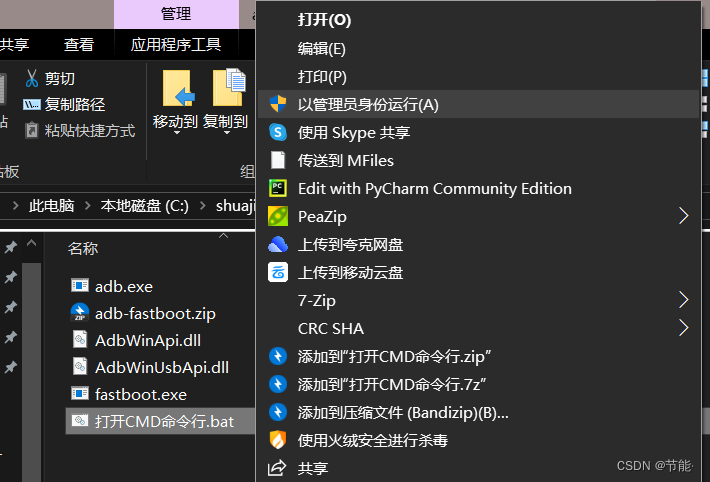
首先去设置里面找到miui版本,点击7次后进入开发者模式,打开里面的有关于USB调试的所有功能,再把默认USB配置改为MTP,接着用数据线连接电脑,电脑打开adb-fastboot,用管理员身份运行。
(2)刷入Twrp:
查看手机有没有连接,输入:
adb devices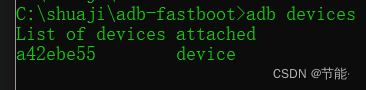
重启到bootloader模式,输入:
adb reboot bootloader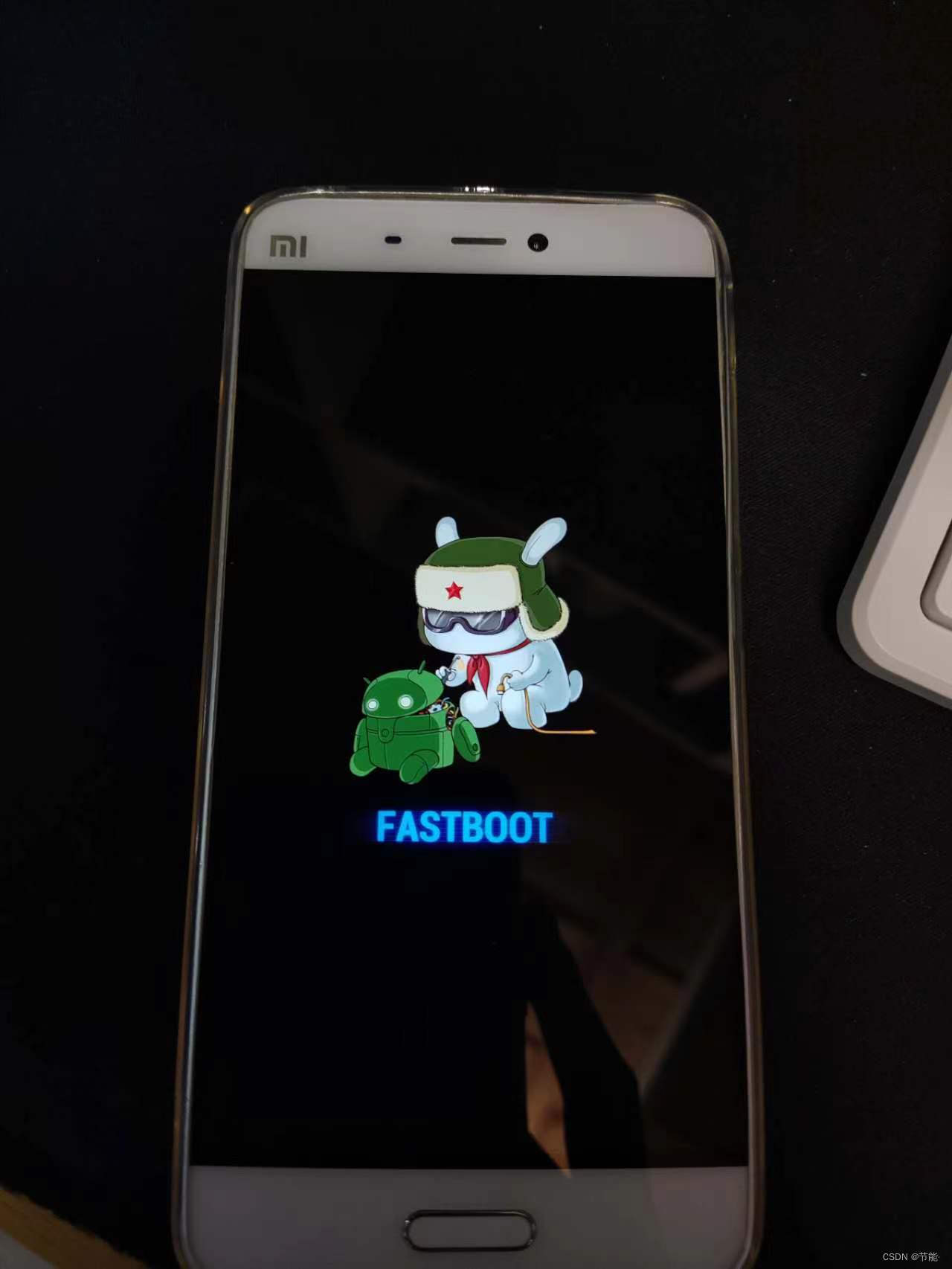
准备好Twrp安装包输入:
fastboot boot 你的twrp安装包路径
之后等待一会,它会自动启动twrp
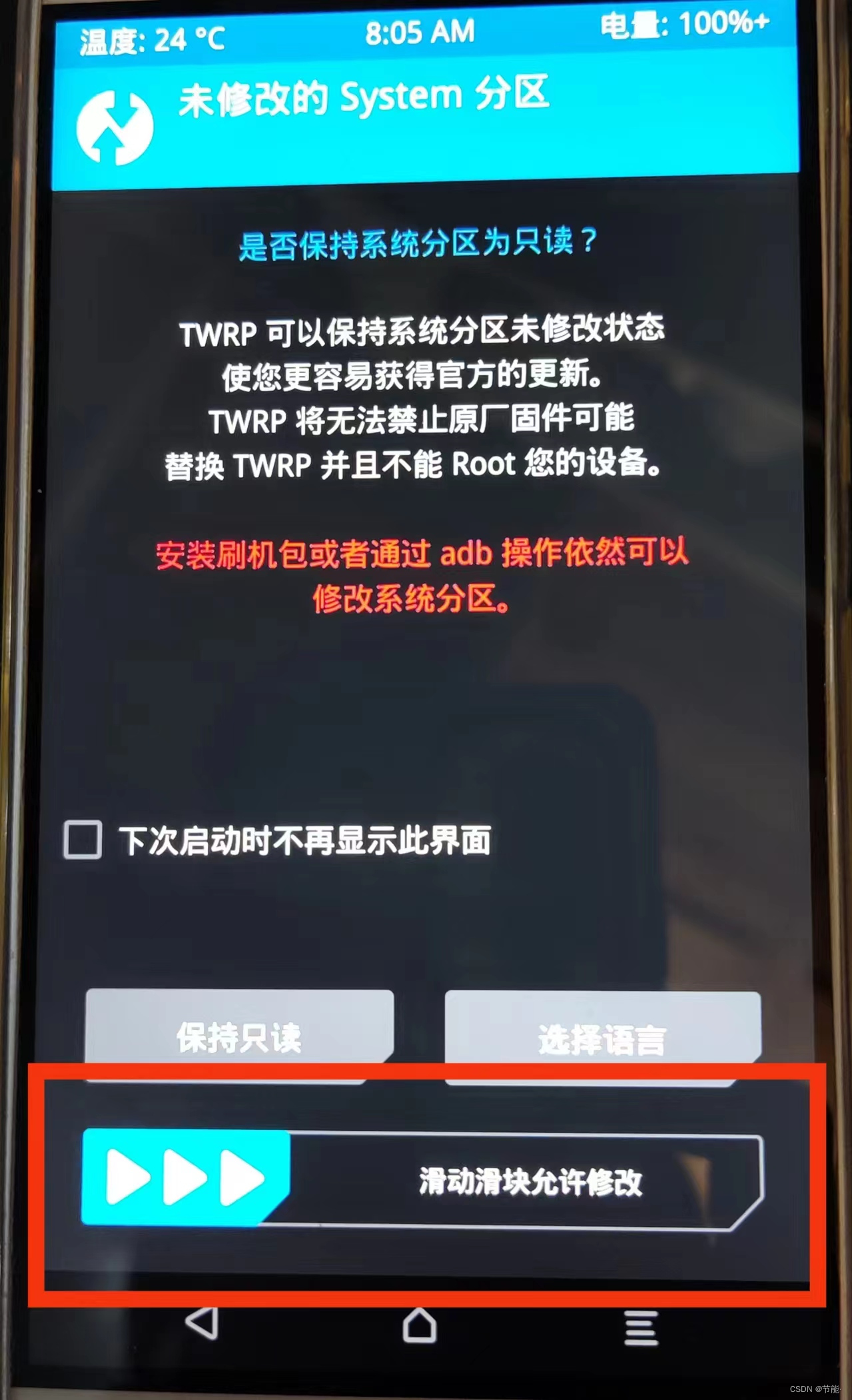
(3)线刷miui10底包:
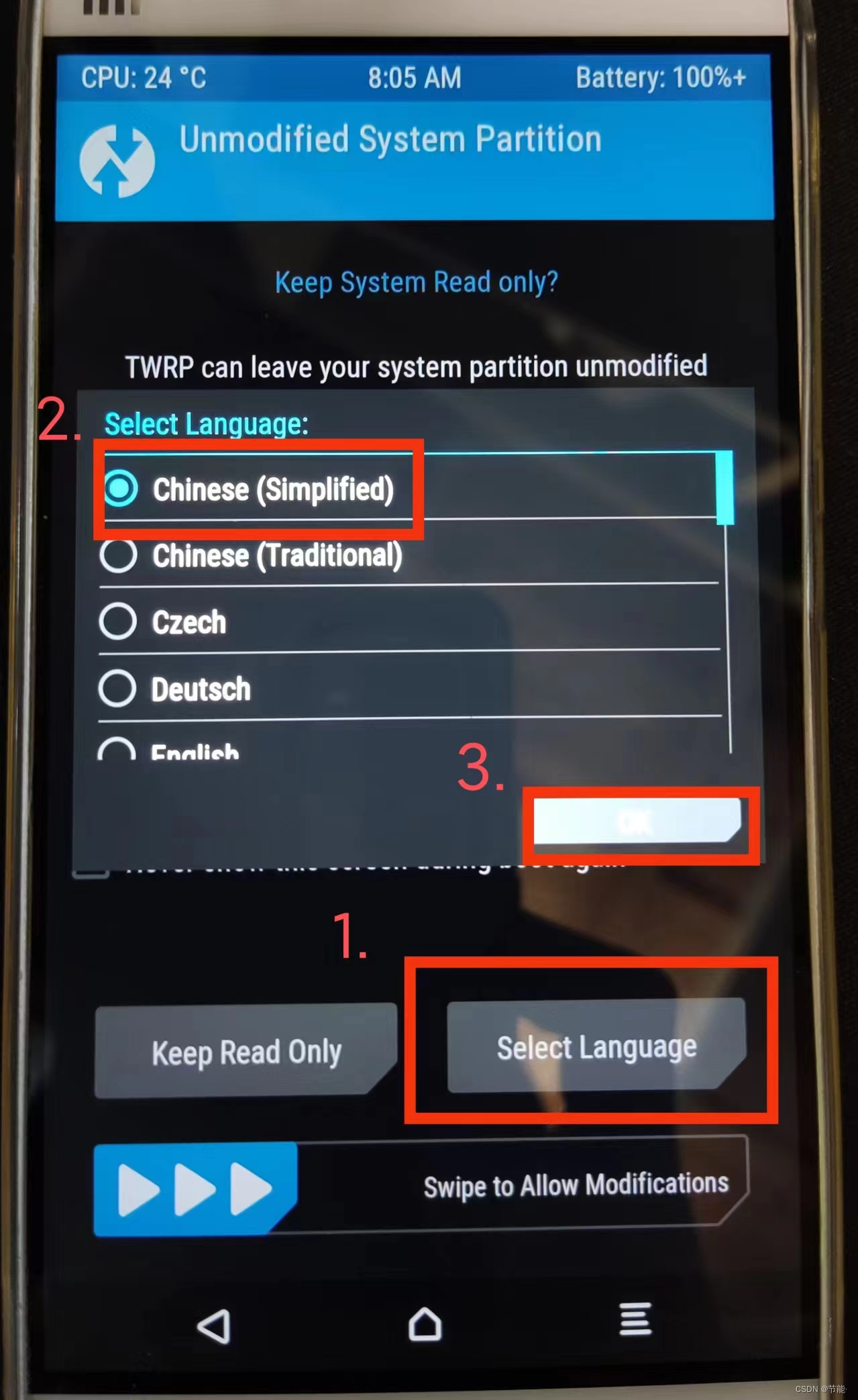
切换语言到中文后,直接滑动滑块
主界面点击清除,直接滑动滑块恢复出厂设置

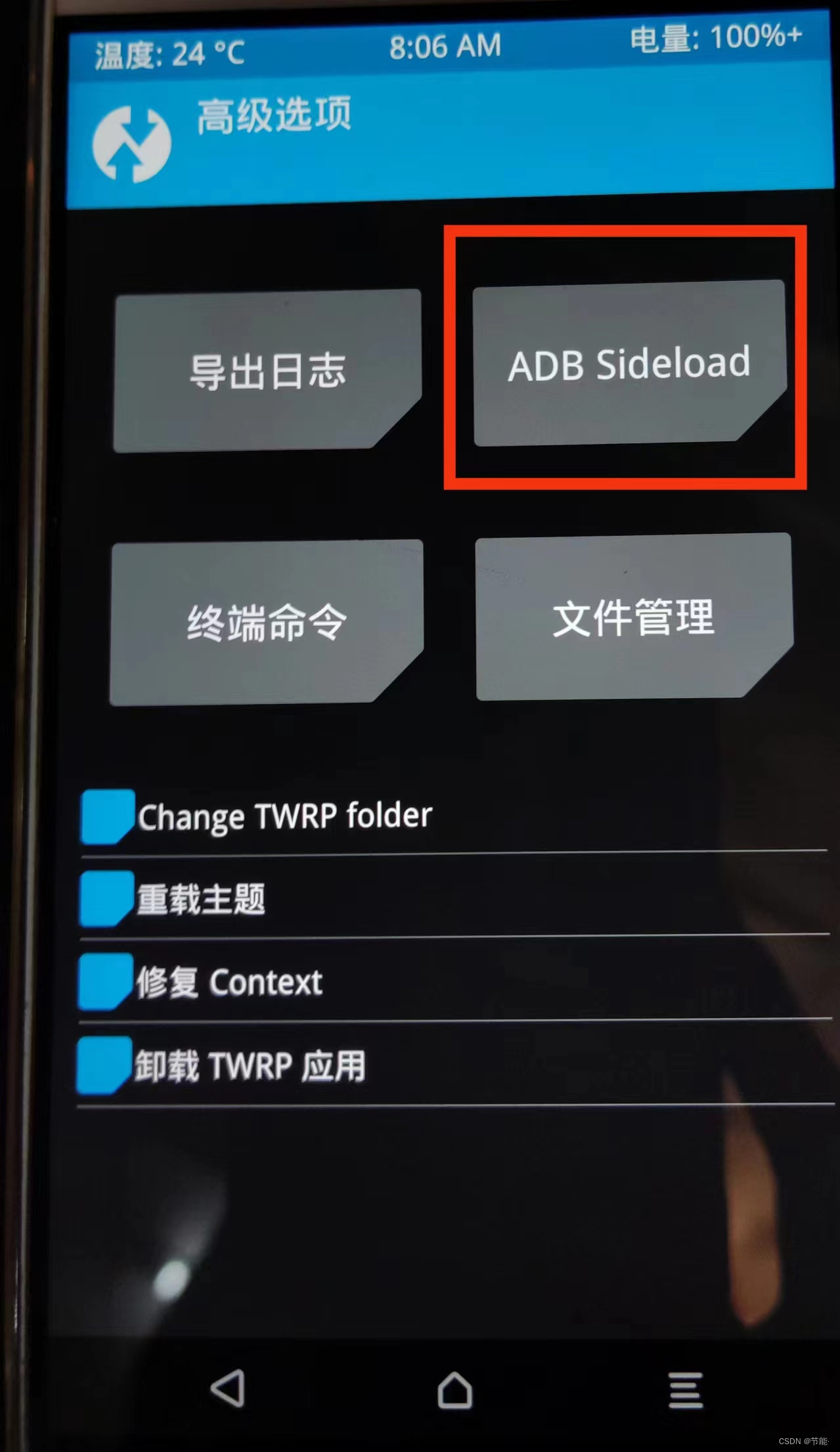
返回主界面后点击高级,再点击adb sideload
接着在电脑输入:
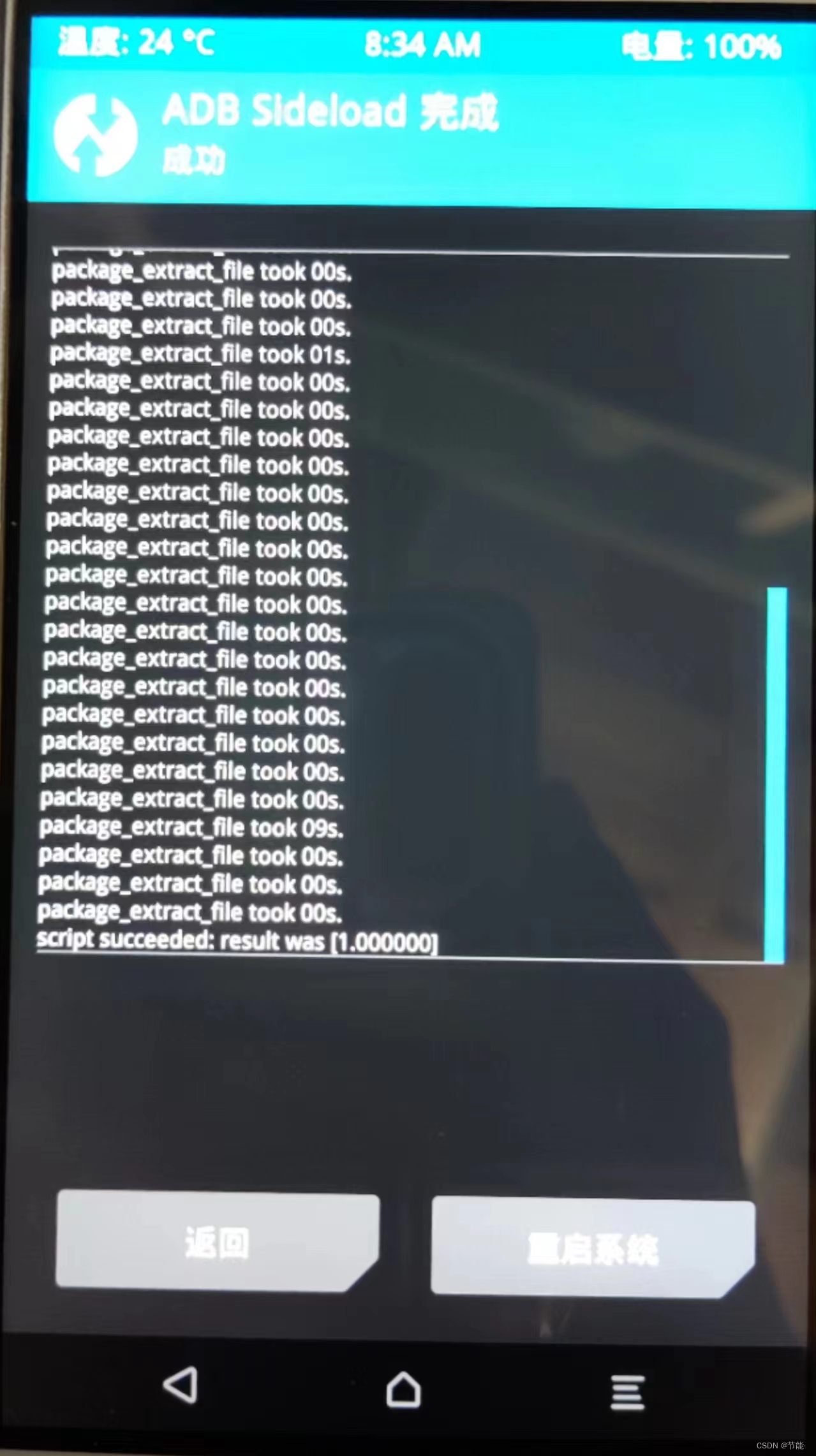
adb sideload miui10底包的路径再在手机端滑动滑块

接着在电脑端回车
出现Total xfer: 1.08x说明成功了
(4)线刷安卓原生Pixel系统:
点击返回后,再次点击adb sideload,还是重复一样的动作,电脑端输入:
adb sideload pixel线刷包路径手机滑动滑块后,电脑端回车
![]()
卡在49%是正常的,过一会出现Total xfer: 1.00x说明成功刷入
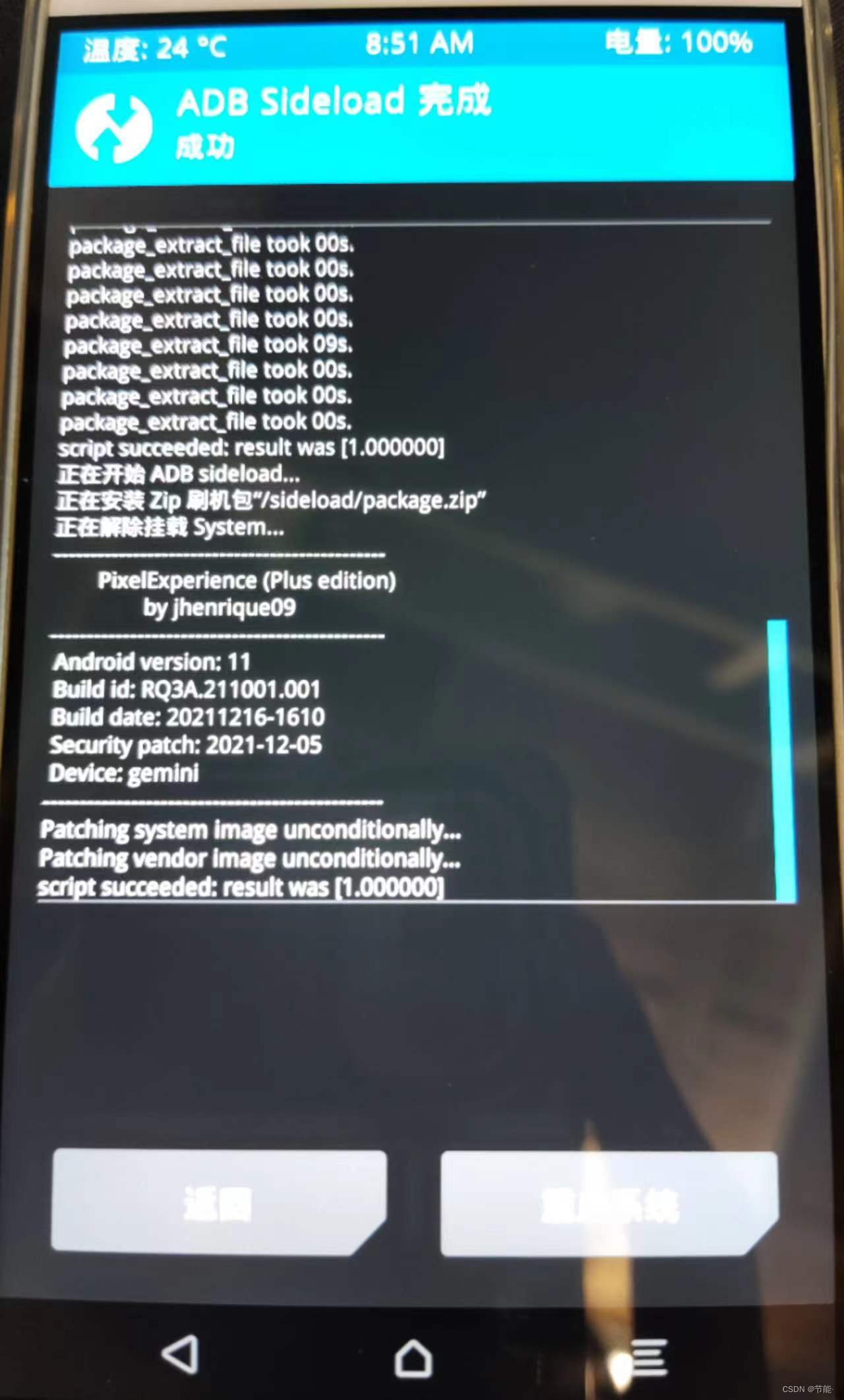
之后点击重启系统就可以享受安卓原生了!

3.配置逆向环境:
(1)Magisk面具获取Root权限:
因为重新刷了系统,所以需要重新开启USB功能,在设置里找到关于手机,点击7次版本号打开开发者模式。

在开发者选项里打开USB调试功能,默认USB传输模式选择文件传输,用数据线连接电脑
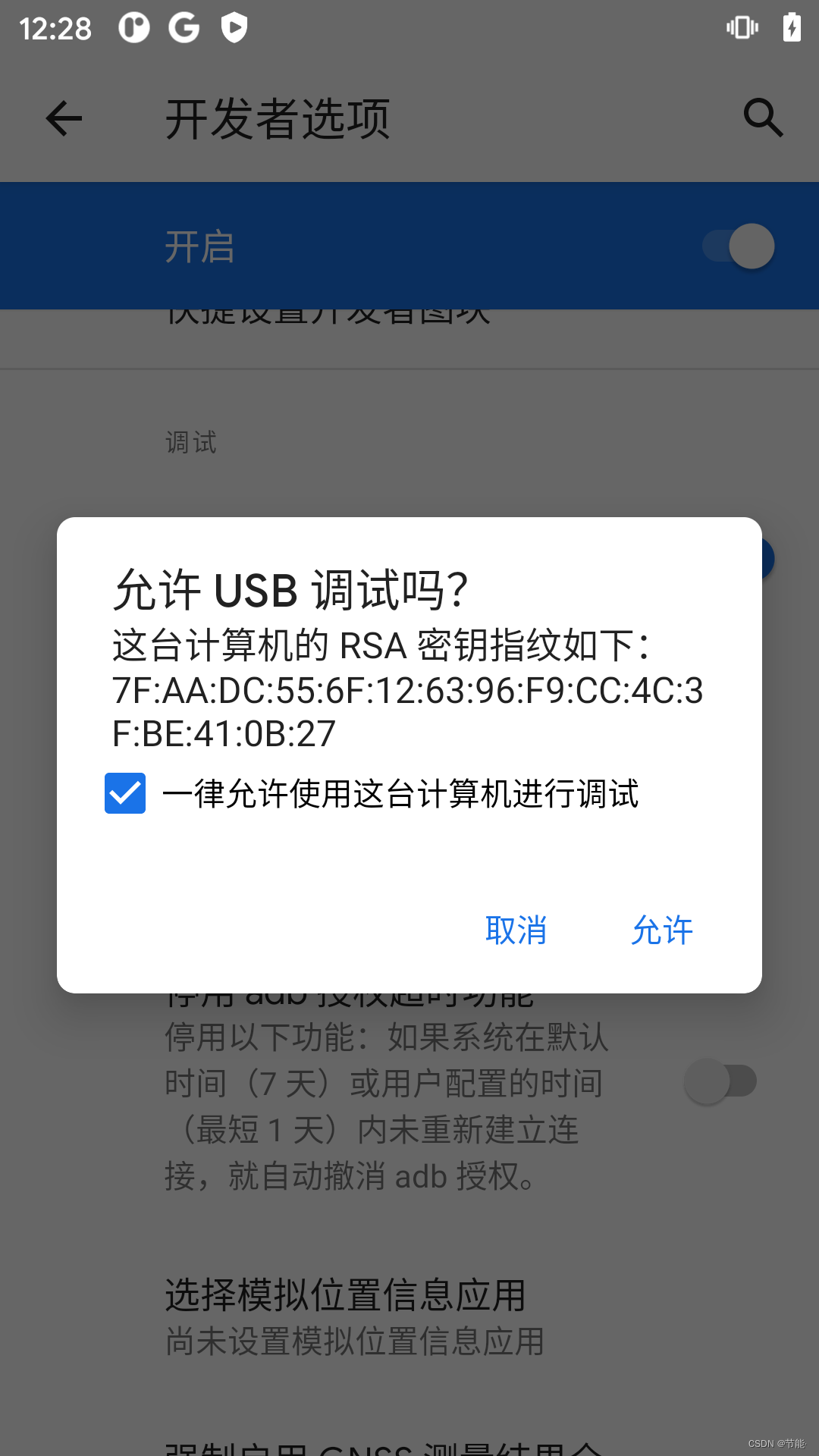
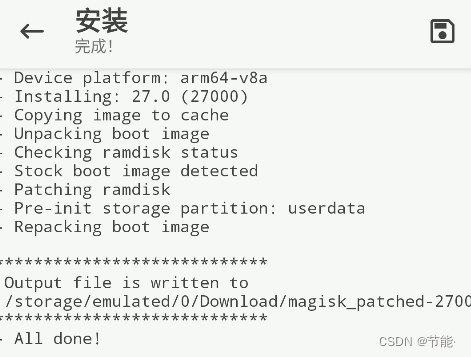
把Magisk面具安装(这里我选择的是22.1版本的Magisk,27.0版本的会导致EdXposed激活失败),把boot.img文件传到手机,打开面具,点击安装,点击修补,选择boot.img

安装完成后找到它输出的目录,把修补完的boot传到电脑

把手机重启,之后在电脑以管理员方式打开adb-fastboot工具,重启手机到bootloader模式,输入:
adb reboot bootloader再刷入修补后的boot文件,输入:
fastboot flash boot 修补后的boot的路径(注意是传到电脑的)出现 OKAY就是成功了

重启设备,输入:
fastboot reboot打开面具,当前有版本号就说明成功获取到了Root
(2)配置EdXposed:
将EdXposed.zip(v0.5.2.2)、riru.zip(v25.4.4)和EdXposed Manager(v4.6.2)软件传到手机,打开面具,点击模块界面,点击从本地安装

点击riru.zip安装
安装成功后再点击一次从本地安装,选择EdXposed.zip安装,安装成功后点击重启
如果两个安装失败的话点击主页的安装重新刷入一下再重复操作
重启手机后,打开EdXposed Manager软件,就会发现EdXp93版激活成功啦!!!
教程结束,感谢各位客官老爷们的捧场,如果对你有一点帮助的话请给我点个赞让我有继续发帖的动力,谢谢!















 631
631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









