









引言
随着物联网技术的快速发展,智能家居设备逐渐走入人们的生活。智能风扇作为其中的一员,不仅能够提供传统风扇的基本功能,还能通过智能化控制和节能设计,提升用户体验并降低能耗。本文将详细介绍如何基于STM32微控制器设计一款智能节能风扇,涵盖硬件选型、电路设计、软件编程以及功能实现等方面。
硬件选型
1. 微控制器
选择STM32F103C8T6作为主控芯片,该芯片具有以下特点:
- 32位ARM Cortex-M3内核,主频72MHz
- 64KB Flash,20KB SRAM
- 丰富的GPIO、定时器、串口等外设
- 低功耗模式,适合节能设计
2. 电机驱动
选用L298N电机驱动模块,该模块具有以下特点:
- 双H桥驱动,可驱动直流电机或步进电机
- 最大输出电流2A,电压范围5V-35V
- 内置续流二极管,保护电路
3. 温湿度传感器
选用DHT11温湿度传感器,该传感器具有以下特点:
- 测量范围:湿度20-90%RH,温度0-50℃
- 数字信号输出,单总线通信
- 低功耗,适合长时间工作
4. 无线通信模块
选用ESP8266 WiFi模块,该模块具有以下特点:
- 支持802.11 b/g/n协议
- 内置TCP/IP协议栈,支持AT指令
- 低功耗,适合远程控制
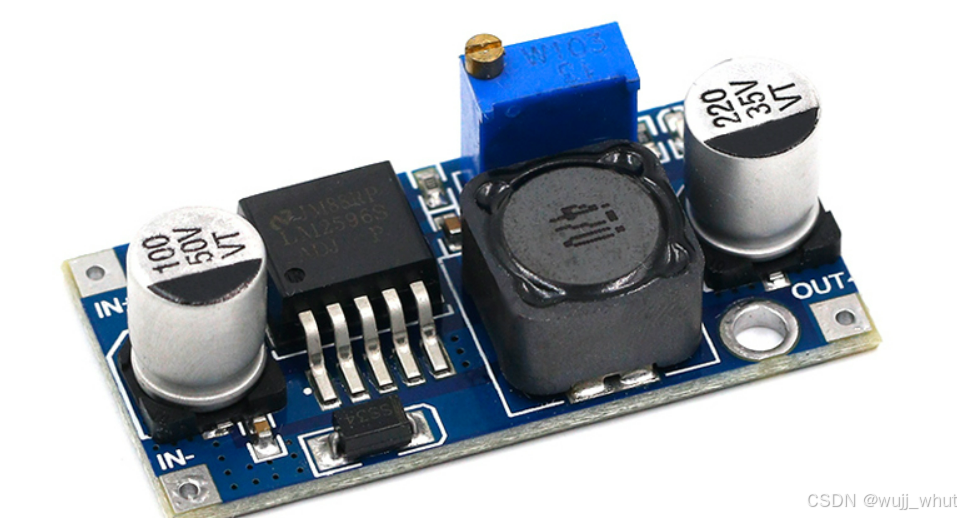
5. 电源管理
选用LM2596降压模块,该模块具有以下特点:
- 输入电压范围4.5V-40V
- 输出电压可调,最大输出电流3A
- 高效率,适合节能设计
电路设计
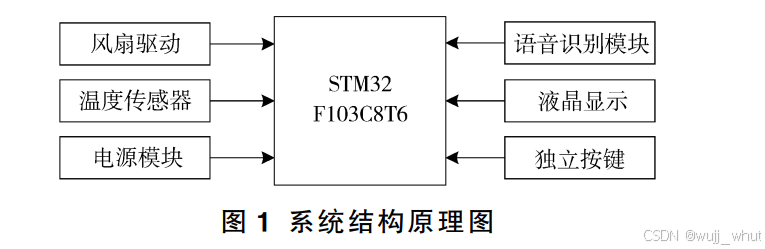
1. 主控电路
STM32F103C8T6通过GPIO与L298N、DHT11、ESP8266等模块连接。具体连接方式如下:
- PA0-PA3:连接L298N的IN1-IN4,控制电机正反转
- PA4:连接DHT11的数据引脚,读取温湿度数据
- PA9-PA10:连接ESP8266的TX-RX,实现串口通信
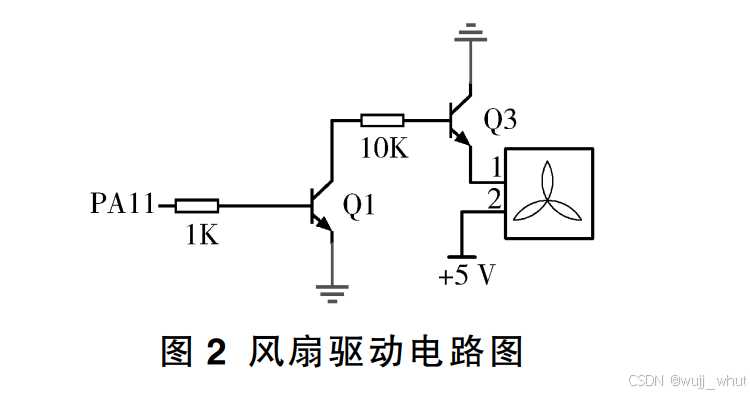
2. 电机驱动电路
L298N模块的OUT1-OUT2连接风扇电机的正负极,通过控制IN1-IN4的电平实现电机的正反转和调速。
3. 温湿度传感器电路
DHT11的数据引脚通过一个4.7K上拉电阻连接到STM32的PA4引脚,VCC和GND分别连接电源和地。
4. 无线通信电路
ESP8266模块的TX-RX分别连接STM32的PA9-PA10,VCC和GND分别连接电源和地。
5. 电源管理电路
LM2596模块的输入端连接12V电源,输出端调整为5V,为STM32、L298N、DHT11、ESP8266等模块供电。
软件编程
1. 开发环境
使用Keil uVision5作为开发环境,配置STM32的工程文件,编写C语言代码。
2. 主程序框架
#include "stm32f10x.h"
#include "dht11.h"
#include "esp8266.h"
#include "motor.h"
void SystemInit(void) {
// 系统初始化
RCC_Configuration();
GPIO_Configuration();
USART_Configuration();
TIM_Configuration();
}
int main(void) {
SystemInit();
DHT11_Init();
ESP8266_Init();
Motor_Init();
while (1) {
// 读取温湿度数据
uint8_t temperature = DHT11_Read_Temperature();
uint8_t humidity = DHT11_Read_Humidity();
// 根据温湿度控制电机转速
if (temperature > 30 || humidity > 70) {
Motor_Set_Speed(100); // 全速运行
} else if (temperature > 25 || humidity > 60) {
Motor_Set_Speed(75); // 中速运行
} else {
Motor_Set_Speed(50); // 低速运行
}
// 远程控制
if (ESP8266_Receive_Data() == '1') {
Motor_Set_Speed(100); // 远程全速运行
} else if (ESP8266_Receive_Data() == '0') {
Motor_Set_Speed(0); // 远程关闭
}
Delay_ms(1000); // 延时1秒
}
}
3. 温湿度读取
#include "dht11.h"
void DHT11_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
uint8_t DHT11_Read_Temperature(void) {
// 读取温度数据
uint8_t data[5];
DHT11_Read_Data(data);
return data[2];
}
uint8_t DHT11_Read_Humidity(void) {
// 读取湿度数据
uint8_t data[5];
DHT11_Read_Data(data);
return data[0];
}
4. 电机控制
#include "motor.h"
void Motor_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void Motor_Set_Speed(uint8_t speed) {
// 设置电机转速
if (speed == 0) {
GPIO_ResetBits(GPIOA, GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3);
} else if (speed <= 50) {
GPIO_SetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3);
} else if (speed <= 75) {
GPIO_SetBits(GPIOA, GPIO_Pin_0 | GPIO_Pin_1);
GPIO_ResetBits(GPIOA, GPIO_Pin_2 | GPIO_Pin_3);
} else {
GPIO_SetBits(GPIOA, GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3);
}
}
5. 无线通信
#include "esp8266.h"
void ESP8266_Init(void) {
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
}
uint8_t ESP8266_Receive_Data(void) {
// 接收数据
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
return USART_ReceiveData(USART1);
}
功能实现
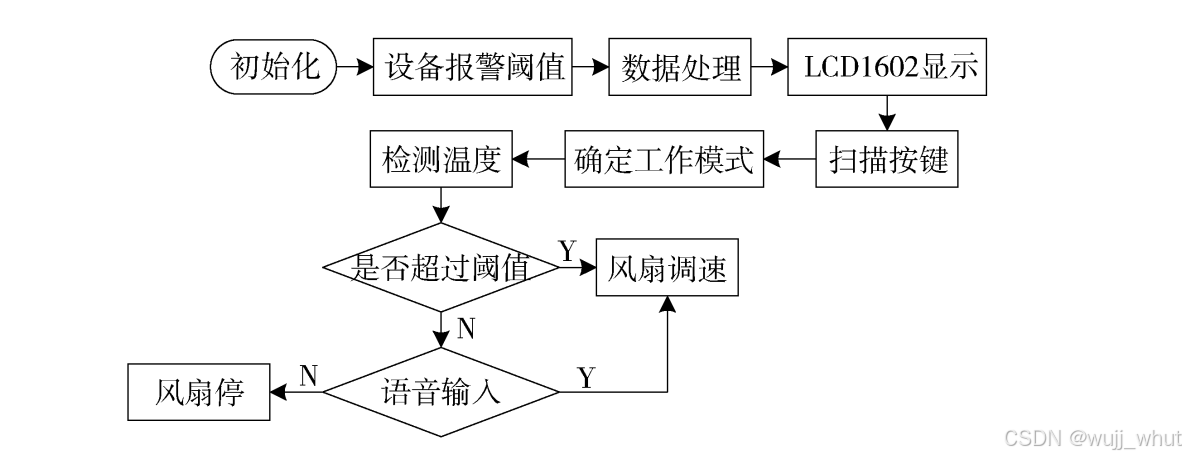
1. 温湿度控制
通过DHT11传感器实时监测环境温湿度,根据设定的阈值自动调整风扇转速。例如,当温度超过30℃或湿度超过70%时,风扇全速运行;当温度在25℃-30℃或湿度在60%-70%时,风扇中速运行;其他情况下,风扇低速运行。
2. 远程控制
通过ESP8266 WiFi模块,用户可以通过手机APP或网页远程控制风扇的开关和转速。例如,发送字符’1’使风扇全速运行,发送字符’0’关闭风扇。
3. 节能设计
通过智能化的温湿度控制和优化的硬件选型,风扇能够根据环境条件自动调整运行状态,避免不必要的能耗。此外,STM32的低功耗模式和LM2596的高效电源管理进一步降低了系统的整体功耗。
结论
本文详细介绍了基于STM32的智能节能风扇的设计过程,包括硬件选型、电路设计、软件编程以及功能实现等方面。通过智能化的控制和优化的硬件选型,实现了风扇的高效节能运行和远程控制。该设计不仅提升了用户体验,还降低了能耗,具有广泛的应用前景。
希望这篇博文对您有所帮助,欢迎在评论区留言讨论!收藏、点赞,期待你的关注!



















 7128
7128

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











