







一:RGB显著性检测
常用数据集
其中有DUTS,ECSSD,DUT-OMRON,PASCAL-S,HKU-IS,SOD,SOC,MSRA-B
(1)DUTS:DUTS-TR(训练集):10553张,DUTS-TE(测试集):5019张
特点:复杂背景、高质量标注,深度学习模型常用数据集
(2)ECSSD:1000张
特点:片内容丰富,包含多个显著目标
(3)DUT-OMRON:5168张
特点:场景复杂,显著目标较小且数量多,包含了更多复杂背景和遮挡,目标位置更加多样化。
(4)PASCAL-S:850张
特点:高质量的显著性标注,包含物体级别的显著目标
(5)HKU-IS:4447张
特点:目标尺寸变化大,前景和背景对比度较强。
(6)SOD:300张
特点:专注于多目标场景, 且标注了精确的边缘掩码。
(7) SOC:6000张
特点:强调“背景干扰”和“目标遮挡”的场景,难度非常高
(8)MSRA-B:5000张
特点:最早的显著性数据集之一,目标清晰且显著。
常用评估指标
有MAE,F-measure,S-measure,E-measure评估指标。
(1)MAE(平均绝对误差)
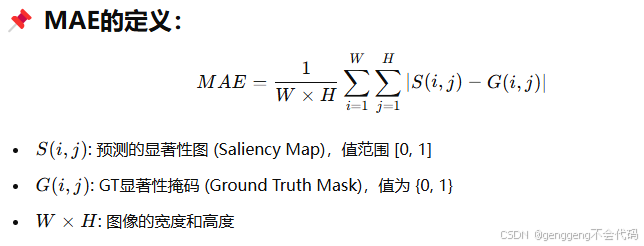
物理意义:衡量的是预测显著性图S与真实标签G之间的像素级误差,MAE的值越小,代表模型预测的显著区域越准确。
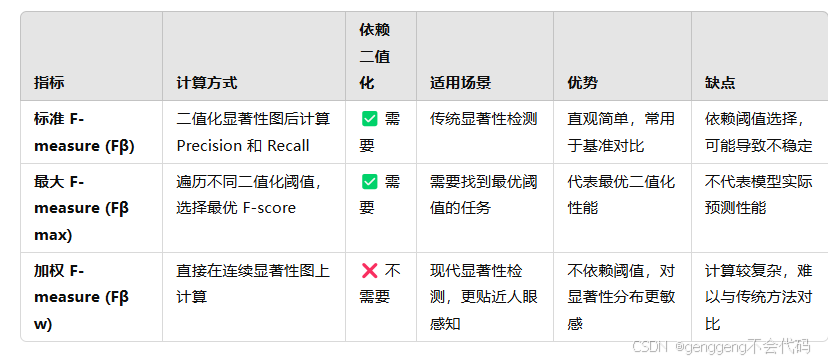
(2)F-measure (F-度量)
F-measure在RGB显著性检测中的三种版本:
(1)![]() :直接在显著性图上选择一个固定的二值化阈值(通常为0.5)来计算Precision和Recall。
:直接在显著性图上选择一个固定的二值化阈值(通常为0.5)来计算Precision和Recall。
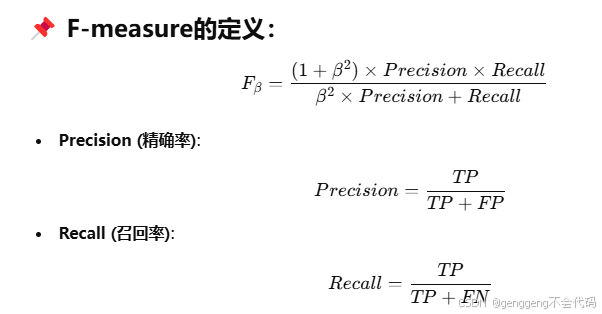


物理意义:综合了精确度和召回率,平衡了显著性检测中的“检测到目标区域”和“抑制背景区域”能力。
存在的缺陷:(1)受阈值选择的影响非常大,如果固定阈值选择不当,评估结果不准确
(2)不能反映模型在不同阈值下的整体性能
(2)![]() :遍历所有阈值 θ∈[0,255],选择最优阈值下的F-measure。解决了固定阈值评估不公平的问题。
:遍历所有阈值 θ∈[0,255],选择最优阈值下的F-measure。解决了固定阈值评估不公平的问题。

核心思想:搜索最有阈值,反映显著性图的上限性能,避免了人为选择阈值的影响,能够反映模型的全局性能。
(3)![]() :解决了前景-背景不平衡问题,在显著性检测任务中,前景通常较小,背景区域占较大,传统F-measure容易被背景主导。
:解决了前景-背景不平衡问题,在显著性检测任务中,前景通常较小,背景区域占较大,传统F-measure容易被背景主导。
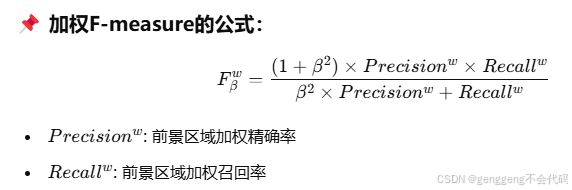
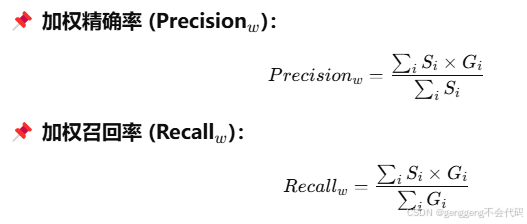
核心思想:给显著目标区域更高的权重,降低背景区域的影响,对边缘区域和细节目标更敏感,在RGB-D SOD、RGB-T SOD等多模态任务中,几乎是标配指标。
(3)S-measure(结构度量)
在传统的 F-measure 中,前景区域 (salient object) 和 背景区域 (background) 受到二值化阈值的影响,评估不够稳定。而 S-measure 是一种结构相似性度量 (Structural Similarity Metric),直接衡量预测显著图和Ground Truth在结构层面的匹配程度。


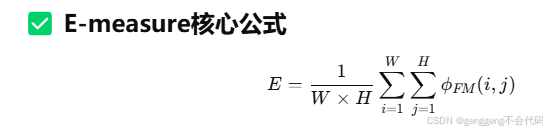
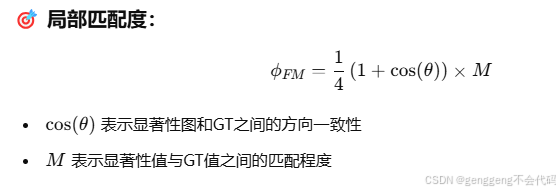
(4)E-measure(增强度量)
E-measure = 全局信息 (global) + 局部对齐 (local) 的结合度量。
二:RGB-D显著性检测 (RGB-D SOD)
常用数据集
有NJU2K,NLPR,SIP,STERE,DES,RGBD135,ReDWeb-S,COME
(1)NJU2K:1985张
特点:最早提出的RGB-D SOD数据集,场景多样性极高,被大量先进的方法使用。
(2)NLPR:1000张
特点:高质量双目深度图,小规模但高质量,适合模型鲁棒性评估
(3)SIP:929张
特点:强调行人显著性检测,移动设备拍摄,背景复杂,MobileSal论文核心测试集
(4)STERE:1000张
特点:经典立体匹配深度图,室内场景为主,辅助评估模型性能
(5)DES:135张
特点:最早的RGB-D SOD数据集之一,常用于模型快速验证,适合小型模型调试或迁移学习任务
(6)RGBD135:135张
特点:适合小型显著性检测任务,强调物体级显著性,场景相对简单,常用于模型鲁棒性评估
(7)ReDWeb-S:3600张
特点:使用深度估计算法生成深度图,用于深度感知和显著性结合任务
(8)COME:2900张
特点:当前RGB-D SOD领域最大规模数据集,深度图质量高,且包含真实深度和合成深度两部分。
常用评估指标
有:有MAE,F-measure,S-measure,E-measure评估指标。见上面
三:RGB-T显著性检测 (RGB-T SOD)
常用数据集
有:VT821,VT1000,VT5000(最新最全),VT2000
(1)VT821:821张
特点:场景类型: 室内 + 室外,深度来源: 红外热成像相机,GT质量: 精细像素级,RGB-T SOD领域最早且最常用的数据集。
(2)VT1000:1000张
特点:场景类型: 复杂环境 + 昼夜场景,热图质量: 高质量红外图像,GT质量: 像素级标注,MobileSal论文中的核心测试集之一。
(3)VT5000 :5000张
特点:场景类型: 多种场景 (低光、雨天、遮挡、背景干扰等),热图来源: 双光谱传感器,GT质量: 像素级标注,RGB-T SOD领域目前最大规模的数据集。
(4)VT2000:2000张
特点:场景类型: 动态目标跟踪 + 晚间场景,热图质量: 高清红外热成像,GT质量: 精细像素级
常用评估指标
有:MAE,F-measure,S-measure,E-measure评估指标。见上面
四:Co-SOD协同显著性检测
常用数据集
有:CoSal2015,CoSOD3k,CoCA,Cosal150
(1)CoSal2015:2015张
特点:场景类型: 自然场景 + 室内/室外场景,GT质量: 精细像素级,Co-SOD领域最早且最广泛使用的数据集
(2)CoSOD3k:3160张
特点:场景类型: 复杂多物体 + 光照变化 + 背景干扰,GT质量: 精细像素级标注,目前Co-SOD领域最受欢迎的数据集
(3)CoCA:1295张
特点:场景类型: 极端挑战场景 (遮挡、背景干扰、目标变化等),GT质量: 像素级标注,用于评估Co-SOD模型的鲁棒性
(4)Cosal150:150张
特点:场景类型: 简单场景 (单一物体),GT质量: 粗标注,适合小规模验证
常用评估指标
有:MAE,F-measure,S-measure,E-measure评估指标。见上面C-measure(协同一致性度量 (Co-SOD独有指标))
C-measure(协同一致性度量):衡量同一组图像之间的显著性一致性

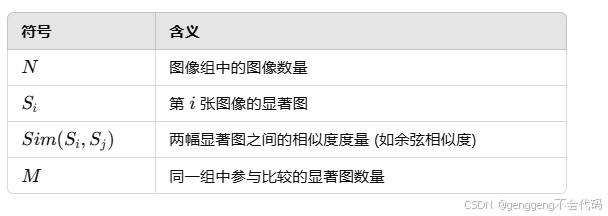

作用:衡量Co-SOD模型是否能够在不同图像中检测除共享的显著目标。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









