






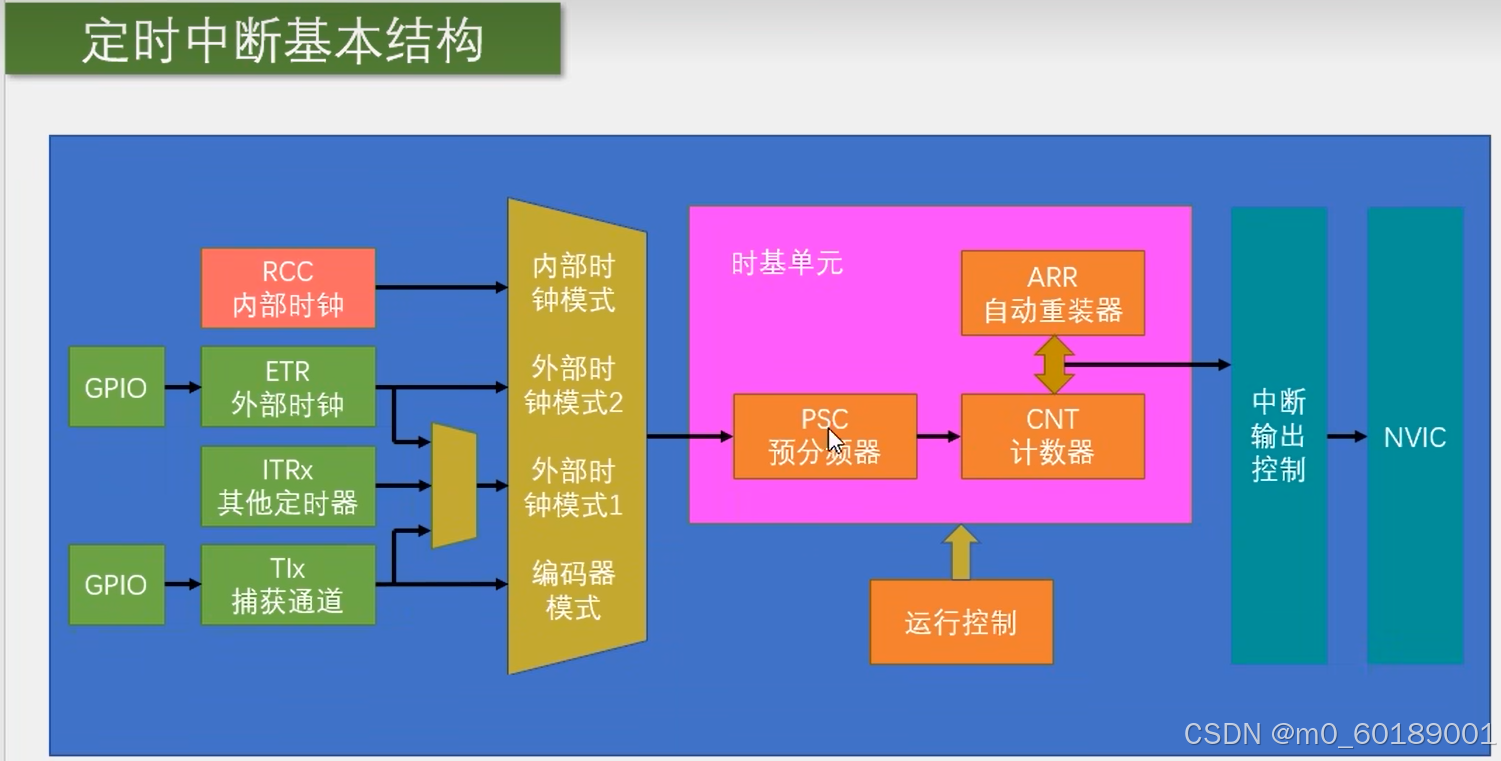
定时器定时中断
恢复缺省配置
void TIM_DeInit(TIM_TypeDef* TIMx);时机单元初始化
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);void TIM_TimeBaseStructInit(TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);使能计数器
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);使能中断输出信号
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);选择内部时钟
void TIM_InternalClockConfig(TIM_TypeDef* TIMx);选择ITRx其它定时器时钟
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);选择TIx捕获通道的时钟
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource,
uint16_t TIM_ICPolarity, uint16_t ICFilter);选择ETR通过外部时钟模式1输入的时钟
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);选择ETR通过外部时钟模式2输入的时钟
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);单独写预分频值的函数
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode);改变新的计数器模式
void TIM_CounterModeConfig(TIM_TypeDef* TIMx, uint16_t TIM_CounterMode);自动重装器预装功能配置
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);给计数器写入一个值
void TIM_SetCounter(TIM_TypeDef* TIMx, uint16_t Counter);给自动重装器写入一个值
void TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);获取当前计数器的值
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);获取当前的预分频器的值
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);获取标志位和清除标志位的值
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);配置定时器流程
##Timer.c
extern uint16_t Num;
void Timer_Init(void)
{
// 1. 开启定时器1时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// 2. 选择时机单元时钟 设置为内部时钟
TIM_InternalClockConfig(TIM2);
// 3. 配置时机单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitstructer;
TIM_TimeBaseInitstructer.TIM_ClockDivision = TIM_CKD_DIV1; //1分频,也是不分屏
TIM_TimeBaseInitstructer.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitstructer.TIM_Period = 10000 - 1;
TIM_TimeBaseInitstructer.TIM_Prescaler = 7200 - 1; //1Hz 对72M进行7200分频 得到10K的计数频率,在10K的频率下计10000个数,就是1s
TIM_TimeBaseInitstructer.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitstructer);
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除更新中断标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//使能中断
// 4. NVIC优先级分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级
NVIC_Init(&NVIC_InitStructure);
// 5. 启动定时器
TIM_Cmd(TIM2, ENABLE);
}
// 当定时器产生更新中断时,函数会被自动执行
void TIM2_IRQHandler(void)
{
// 检查中断标志位
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) // 获取中断标志位
{
/************************业务代码**********************/
Num ++;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除标志位
}
}
##main.c
main()
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num;
int main(void)
{
OLED_Init();
Timer_Init();
OLED_ShowString(2, 4, "Num:");
while (1)
{
OLED_ShowNum(2, 8, Num, 5);
}
}定时器外部时钟
#include "stm32f10x.h" // Device header
extern uint16_t Num;
void Timer_Init(void)
{
// 1. 开启定时器1时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 通过ETR引脚的外部时钟模式2配置外部时钟2
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x00);
// 3. 配置时机单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitstructer;
TIM_TimeBaseInitstructer.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitstructer.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitstructer.TIM_Period = 10 - 1;
TIM_TimeBaseInitstructer.TIM_Prescaler = 1 - 1;
TIM_TimeBaseInitstructer.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitstructer);
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除更新中断标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
// 4. NVIC优先级分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
// 5. 启动定时器
TIM_Cmd(TIM2, ENABLE);
}
// 获取Cnt计数器的值
uint16_t Timer_GetCounter(void)
{
return TIM_GetCounter(TIM2);
}
// 当定时器产生更新中断时,函数会被自动执行
void TIM2_IRQHandler(void)
{
// 检查中断标志位
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) // 获取中断标志位
{
/************************业务代码**********************/
Num ++;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除标志位
}
}main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
uint16_t Num;
int main(void)
{
OLED_Init();
Timer_Init();
OLED_ShowString(2, 4, "Num:");
OLED_ShowString(3, 4, "Cnt:");
while (1)
{
OLED_ShowNum(2, 8, Num, 5);
OLED_ShowNum(3, 8, Timer_GetCounter(), 5);
}
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









