







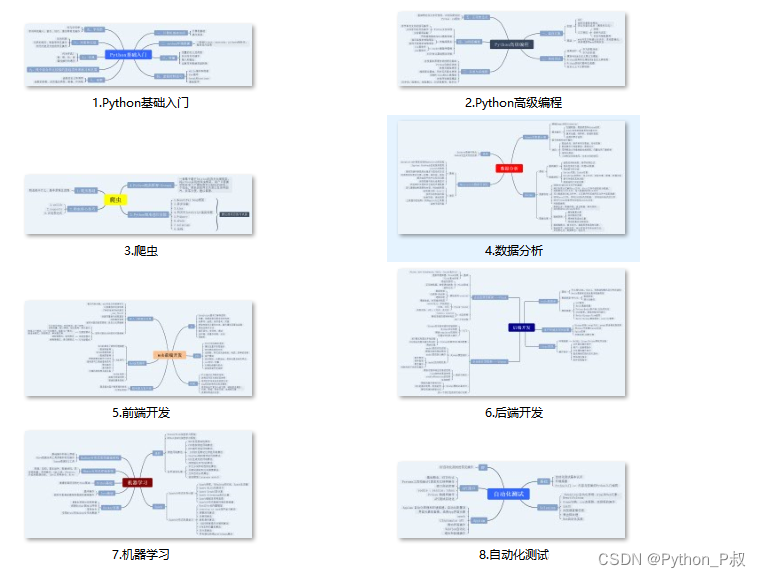
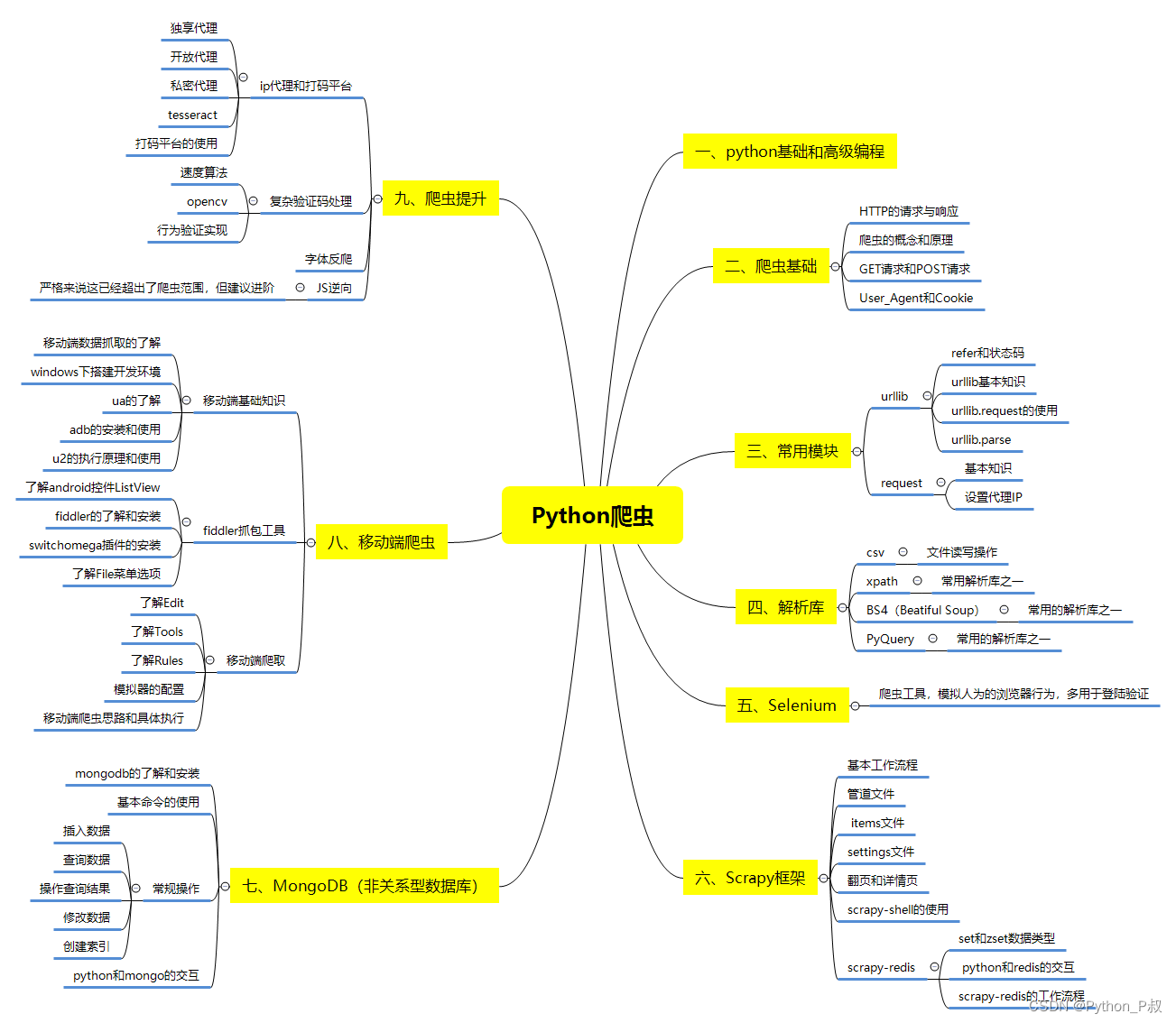
一、Python所有方向的学习路线
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照下面的知识点去找对应的学习资源,保证自己学得较为全面。
二、Python必备开发工具
工具都帮大家整理好了,安装就可直接上手!
三、最新Python学习笔记
当我学到一定基础,有自己的理解能力的时候,会去阅读一些前辈整理的书籍或者手写的笔记资料,这些笔记详细记载了他们对一些技术点的理解,这些理解是比较独到,可以学到不一样的思路。
四、Python视频合集
观看全面零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。
五、实战案例
纸上得来终觉浅,要学会跟着视频一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。
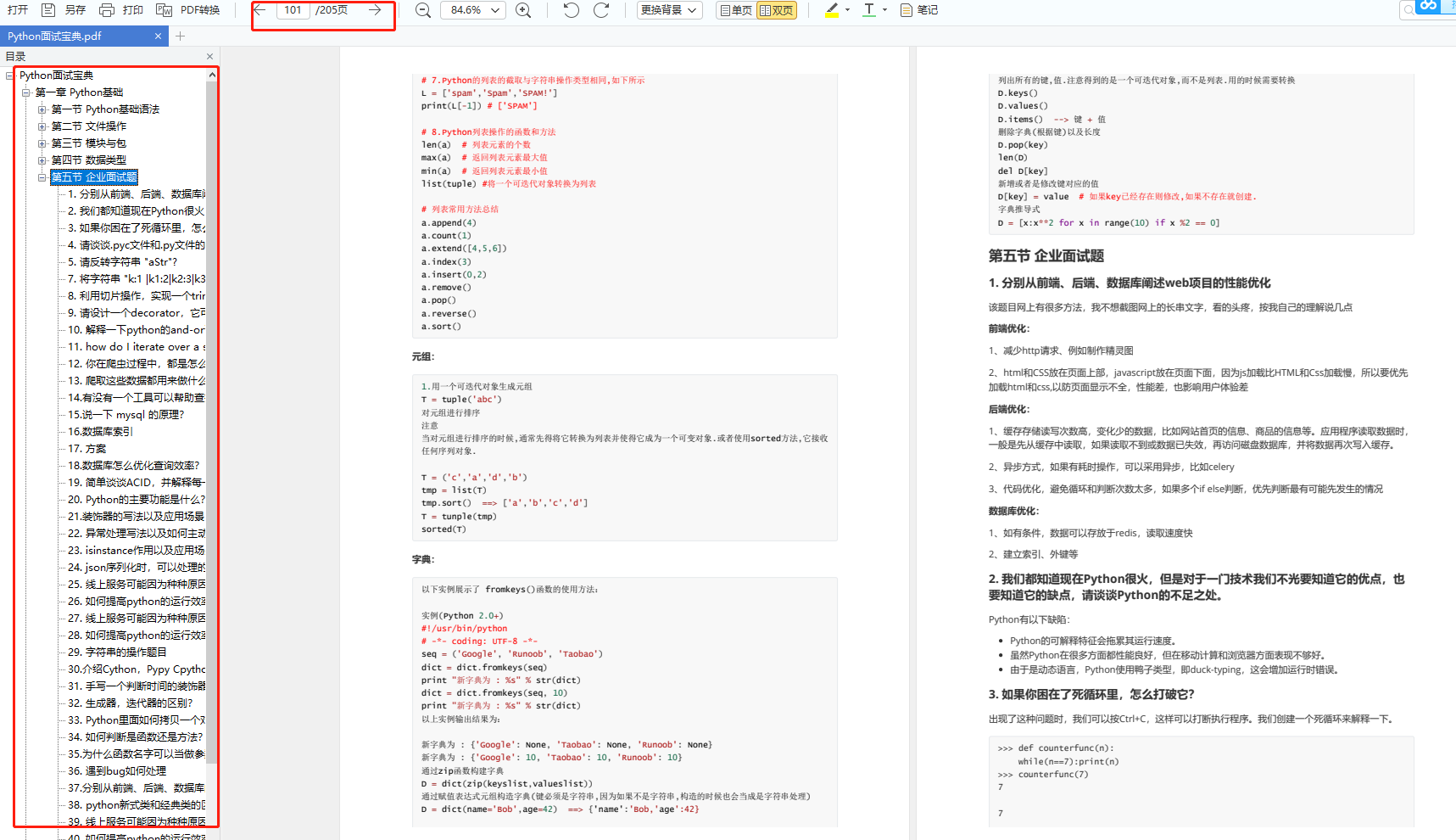
六、面试宝典
简历模板
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
# Grabbing the Holistic Model from Mediapipe and
# Initializing the Model
mp_holistic = mp.solutions.holistic
holistic_model = mp_holistic.Holistic(
min_detection_confidence = 0.5 ,
min_tracking_confidence = 0.5
)
# Initializing the drawng utils for drawing the facial landmarks on image
mp_drawing = mp.solutions.drawing_utils
让我们研究一下整体模型的参数:
Holistic(
static_image_mode=False,
model_complexity=1,
smooth_landmarks=True,
min_detection_confidence=0.5,
min_tracking_confidence=0.5
)
复制代码
-
**静态图像模式:**它用于指定输入图像是否必须被视为静态图像或视频流。默认值为false。
-
**模型复杂性:**它用于描述姿态地标模型的复杂度:0,1,或2。随着模型复杂度的增加,地标精度和延迟增加。默认值为1。
-
**平滑的地标:**该参数通过对不同输入图像的姿态标志进行滤波,减少预测中的抖动。默认值为True。
-
**最小检测可信度:**它被用来指定从人-检测模型中检测成功的最小置信度值。可以在[0.01.0]中指定一个值。默认值为0.5。
-
**最小跟踪信心:**它被用来指定从地标跟踪模型中检测成功的最小置信度值。可以在[0.01.0]中指定一个值。默认值为0.5。
第三步:从图像中检测脸部和手部的地标。整体模型对图像进行处理,为面部、左手和右手生成地标,并检测
-
使用OpenCV从摄像机中连续捕获帧。
-
将BGR映像转换为RGB映像,并使用初始化的整体模型进行预测。
-
整体模型所做的预测保存在结果变量中,从该变量中,我们可以分别使用Resul.Faces_landmark、Resul.right_Hand_landmark、Resul.左侧_Hand_landmark来访问地标。
-
使用绘图功能在图像上绘制检测到的地标。
-
显示结果图像。
Python 3
# (0) in VideoCapture is used to connect to your compyter's default camera
capture = cv2.VideoCapture( 0 )
# Initializing current time and precious time for calculating the FPS
previousTime = 0
currentTime = 0
while capture.isOpened():
# capture frame by frame
ret, frame = capture.read()
# resizing the frame for better view
frame = cv2.resize(frame, ( 800 , 600 ))
# Converting the from from BGR to RGB
image = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
# Making predictions using holistic model
# To improve performance, optionally mark the image as not writeable to
# pass by reference.
image.flags.writeable = False
results = holistic_model.process(image)
image.flags.writeable = True
# Converting back the RGB image to BGR
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
# Drawing the Facial Landmarks
mp_drawing.draw_landmarks(
image,
results.face_landmarks,
mp_holistic.FACE_CONNECTIONS,
mp_drawing.DrawingSpec(
color = ( 255 , 0 , 255 ),
thickness = 1 ,
circle_radius = 1
),
mp_drawing.DrawingSpec(
color = ( 0 , 255 , 255 ),
thickness = 1 ,
circle_radius = 1
)
)
# Drawing Right hand Land Marks
mp_drawing.draw_landmarks(
image,
results.right_hand_landmarks,
mp_holistic.HAND_CONNECTIONS
)
# Drawing Left hand Land Marks
mp_drawing.draw_landmarks(
image,
results.left_hand_landmarks,
mp_holistic.HAND_CONNECTIONS
)
# Calculating the FPS
currentTime = time.time()
fps = 1 / (currentTime - previousTime)
previousTime = currentTime
# Displaying FPS on the image
cv2.putText(image, str ( int (fps)) + " FPS" , ( 10 , 70 ), cv2.FONT_HERSHEY_COMPLEX, 1 , ( 0 , 255 , 0 ), 2 )
# Display the resulting image
cv2.imshow( "Facial and Hand Landmarks" , image)
# Enter key 'q' to break the loop
一、Python所有方向的学习路线
Python所有方向路线就是把Python常用的技术点做整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。

二、学习软件
工欲善其事必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

三、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









