






代码:https://github.com/hasanirtiza/Pedestron
1. 问题提出
现有的行人检测模型都不具有领域适应性(大多数现有的方法都集中在特定的行人数据集上,不能推广到其他地方),这也就意味着无法将其无法推广到实际应用之中。
2. 实验设置
数据集

Caltech 从美国洛杉矶一辆汽车录制的 10 小时视频中提取,数据多样性和行人密度都较低;
CityPersons 记录在德国和邻国27个城市,数据多样性较前者更好;
ECP 记录在欧洲 12 个国家的 31 个不同城市且有白天和夜间的图像,多样性和难度多大于前两者;
CrowdHuman 和 Wider Pedestrian 为网络爬取数据集,数据多样性和行人密度都较好。
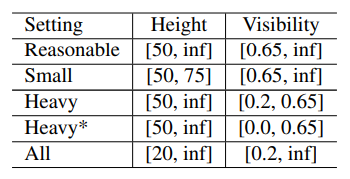
评估方法:MR-2,不同的遮挡程度(如下),跨数据集评估(在 A的训练集上训练 B 的测试/验证集上测试)
Baseline:Cascade R-CNN
Backbone:HRNet
3. 实验结果
行人检测器比一般的物体检测器泛化性更差
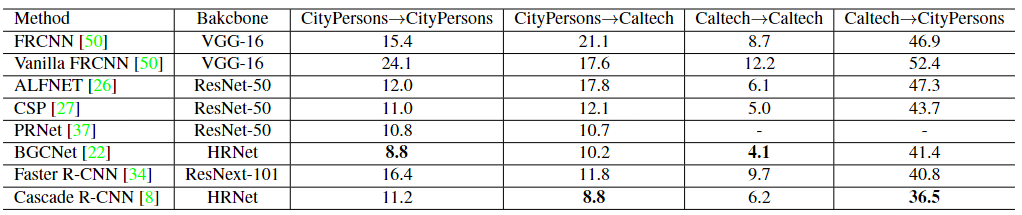
(上面六个是专用的行人检测器,下面两个是通用的物体检测器;"CityPersons->Caltech"表示在CityPersons训练在Caltech测试)
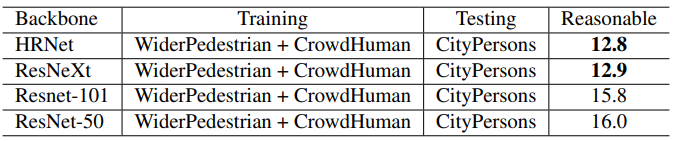
证明Cascade R-CNN的学习和泛化能力(与backbone换成HRNet的CSP相比)
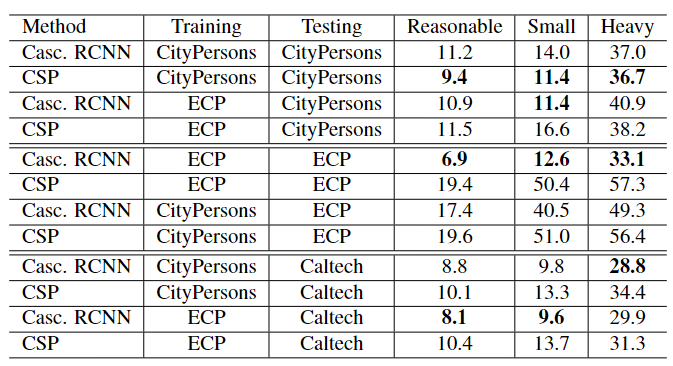
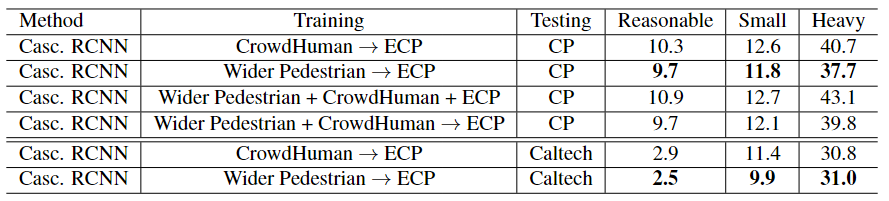
多样化和密度高的数据集可以提高泛化能力,Cascade RCNN 等通用对象检测方法往往更受益于多样化和密集高的数据集,CrowdHuman 和 Wider Pedestrian 是预训练的合适选择
渐进式的微调可以提高性能
从一般的多样化数据集(远离目标域)开始,然后对更接近目标域的数据集进行微调。(A → B 指的是在数据集 A 上进行预训练并在数据集 B 上进行微调。而 A + B 指的是简单地将两个数据集合并在一起,并在合并后的更大的数据集上训练模型)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









