






文章目录
前言
内存管理是C++最令人切齿痛恨的问题,也是C++最有争议的问题,C++高手从中获得了更好的性能,更大的自由,C++菜鸟的收获则是一遍一遍的检查代码和对C++的痛恨,但内存管理在C++中无处不在,内存泄漏几乎在每个C++程序中都会发生,因此要想成为C++高手,内存管理一关是必须要过的,除非放弃C++,转到Java或者C#,他们的内存管理基本是自动的,当然你也放弃了自由和对内存的支配权,还放弃了C++超绝的性能。
本期专题将从内存管理、内存泄漏、内存回收这三个方面来探讨C++内存管理问题。
一、内存管理
1.内存分配方式
在C++中,内存分成5个区,他们分别是栈、堆、自由存储区、全局/静态存储区和常量存储区。
栈,在执行函数时,函数内局部变量的存储单元都可以在栈上创建,函数执行结束时这些存储单元自动被释放。栈内存分配运算内置于处理器的指令集中,效率很高,但是分配的内存容量有限。
堆,就是那些由new分配的内存块,他们的释放编译器不去管,由我们的应用程序去控制,一般一个new就要对应一个delete。如果程序员没有释放掉,那么在程序结束后,操作系统会自动回收。
自由存储区,就是那些由malloc等分配的内存块,他和堆是十分相似的,不过它是用free来结束自己的生命的。
全局/静态存储区,全局变量和静态变量被分配到同一块内存中,在以前的C语言中,全局变量又分为初始化的和未初始化的,在C++里面没有这个区分了,他们共同占用同一块内存区。
常量存储区,这是一块比较特殊的存储区,他们里面存放的是常量,不允许修改。
2.栈和堆的区别
- 1、管理方式不同;
对于栈来讲,是由编译器自动管理,无需我们手工控制;
对于堆来说,释放工作由程序员控制,容易产生memory leak
- 2、空间大小不同;
栈是向低地址扩展的数据结构,是一块连续的内存区域,栈顶的地址和栈的最大容量是系统预先规定好的,能从栈获得的空间较小。
堆是向高地址扩展的数据结构,是不连续的内存区域,这是由于系统是由链表在存储空闲内存地址,自然堆就是不连续的内存区域,且链表的遍历也是从低地址向高地址遍历的,堆的大小受限于计算机系统的有效虚拟内存空间,
堆获得的空间比较灵活,也比较大。在 32 位平台下,VC6 下默认为 1M,堆最大可以到 4G;
- 3、能否产生碎片不同;
对于堆来讲,频繁的new/delete势必会造成内存空间的不连续,从而造成大量的碎片,使程序效率降低。对于栈来讲,则不会存在这个问题,因为栈是先进后出的队列,他们是如此的一一对应,以至于永远都不可能有一个内存块从栈中间弹出,在他弹出之前,在他上面的后进的栈内容已经被弹出,
- 4、生长方向不同;
对于堆来讲,生长方向是向上的,也就是向着内存地址增加的方向;
对于栈来讲,它的生长方向是向下的,是向着内存地址减小的方向增长
- 5、分配方式不同;
堆都是动态分配的,没有静态分配的堆。
栈有2种分配方式:静态分配和动态分配。静态分配是编译器完成的,比如局部变量的分配。动态分配由alloca函数进行分配,但是栈的动态分配和堆是不同的,他的动态分配是由编译器进行释放,无需我们手工实现。
- 6、分配效率不同;
栈是机器系统提供的数据结构,计算机会在底层对栈提供支持:分配专门的寄存器存放栈的地址,压栈出栈都有专门的指令执行,这就决定了栈的效率比较高。
堆则是C/C++函数库提供的,它的机制是很复杂的,例如为了分配一块内存,库函数会按照一定的算法(具体的算法可以参考数据结构/操作系统)在堆内存中搜索可用的足够大小的空间,如果没有足够大小的空间(可能是由于内存碎片太多),就有可能调用系统功能去增加程序数据段的内存空间,这样就有机会分到足够大小的内存,然后进行返回。显然,堆的效率比栈要低得多。
2.有了malloc/free为什么还要new/delete?
malloc与free是C++/C语言的标准库函数,new/delete是C++的运算符。它们都可用于申请动态内存和释放内存。
对于非内部数据类型的对象而言,光用maloc/free无法满足动态对象的要求。对象在创建的同时要自动执行构造函数,对象在消亡之前要自动执行析构函数。由于malloc/free是库函数而不是运算符,不在编译器控制权限之内,不能够把执行构造函数和析构函数的任务强加于malloc/free。
因此C++语言需要一个能完成动态内存分配和初始化工作的运算符new,以及一个能完成清理与释放内存工作的运算符delete。注意new/delete不是库函数。
3.内存耗尽的三种处理方式
(a.return终止程序
void Func(void)
{
A *a = new A;
if(a == NULL)
{
return;
}
…
}
(b.exit()函数退出
void Func(void)
{
A *a = new A;
if(a == NULL)
{
cout << “Memory Exhausted” << endl;
exit(1);
}
…
}
(c.设置异常处理程序
为new和malloc设置异常处理函数。例如Visual C++可以用_set_new_hander函数为new设置用户自己定义的异常处理函数,也可以让malloc享用与new相同的异常处理函数。
4.new和malloc的底层
(a.new和delete的底层实现
new和delete是用户进行动态内存申请和释放的操作符,operator new 和operator delete是系统提供的全局函数,new在底层调用operator new全局函数来申请空间,delete通过operator delete全局函数来释放空间。
事实上系统默认的全局::operator new(size_t size)也只是调用malloc分配内存,并返回一个void*指针
void *__CRTDECL operator new(size_t size) _THROW1(_STD bad_alloc)
{
// try to allocate size bytes
void *p;
while ((p = malloc(size)) == 0)
if (_callnewh(size) == 0)
{
// 如果申请内存失败了,这里会抛出bad_alloc 类型异常
static const std::bad_alloc nomem;
_RAISE(nomem);
}
return (p);
}
而operator delete实际是调用free实现的:
void operator delete(void *pUserData)
{
_CrtMemBlockHeader * pHead;
RTCCALLBACK(_RTC_Free_hook, (pUserData, 0));
if (pUserData == NULL)
return;
_mlock(_HEAP_LOCK); /* block other threads */
__TRY
/* get a pointer to memory block header */
pHead = pHdr(pUserData);
/* verify block type */
_ASSERTE(_BLOCK_TYPE_IS_VALID(pHead->nBlockUse));
_free_dbg( pUserData, pHead->nBlockUse );
__FINALLY
_munlock(_HEAP_LOCK); /* release other threads */
__END_TRY_FINALLY
return;
}
通过上述两个全局函数的实现知道,operator new 实际也是通过malloc来申请空间,如果malloc申请空间成功就直接返回,否则执行用户提供的空间不足应对措施,如果用户提供该措施就继续申请,否则就抛异常。operator delete 最终是通过free来释放空间的。
(b.malloc和free的底层实现
malloc 和 free 在底层实现上也有一些细节需要注意。在执行 malloc(sizeof(Type)) 操作时,实际上是依次进行了以下几个步骤:
- 调用系统函数 sbrk 来扩展程序的数据段。(windows则会调用win API来实现这一功能)
- 将申请到的内存块与已经使用的内存块链接起来。
- 返回指向申请到的内存空间的指针。
而在执行 free(p)操作时,实际上是依次进行了以下几个步骤:
- 将 p 所指向的内存块标记为未使用。
- 将 p 所指向的内存块与其他未使用的内存块合并起来。
- 如果合并后的内存块没有被占用,则释放该内存块。
需要注意的是,在使用 malloc/free 进行动态内存分配时,需要自己负责调用类的构造函数和析构函数,并且无法计算所需的内存空间大小。
sbrk 函数是一个系统调用,用于扩展程序的数据段。
在 Linux 系统中,sbrk 函数可以返回当前堆顶部地址,并且可以将堆顶部地址向上或向下移动指定的字节数。
5.new和delete的原理
(1.内置类型
如果申请的是内置类型的空间,new和malloc,delete和free基本类似,不同的地方是:new/delete申请和释放的是单个元素的空间,new[]和delete[]申请的是连续空间,而且new在申请空间失败时会抛异常,malloc会返回NULL。
(2.自定义类型
new的原理
- 调用operator new函数申请空间
- 在申请的空间上执行构造函数,完成对象的构造
delete的原理
- 在空间上执行析构函数,完成对象中资源的清理工作
- 调用operator delete函数释放对象的空间
new T[N]的原理
- 调用operator new[]函数,在operator new[]中实际调用operator new函数完成N个对象空间的申请
- 在申请的空间上执行N次构造函数
delete[]的原理
- 在释放的对象空间上执行N次析构函数,完成N个对象中资源的清理
- 调用operator delete[]释放空间,实际在operator delete[]中调用operator delete来释放空间
6.malloc/free和new/delete的区别
- malloc和free是函数,new和delete是操作符
- malloc申请的空间不会初始化,new可以初始化
- malloc申请空间时,需要手动计算空间大小并传递,new只需在其后跟上空间的类型即可,如果是多个对象,[]中指定对象个数即可
- malloc的返回值为void*, 在使用时必须强转,new不需要,因为new后跟的是空间的类型
- malloc申请空间失败时,返回的是NULL,因此使用时必须判空,new不需要,但是new需要捕获异常
- 申请自定义类型对象时,malloc/free只会开辟空间,不会调用构造函数与析构函数,而new在申请空间后会调用构造函数完成对象的初始化,delete在释放空间前会调用析构函数完成空间中资源的清理
二、内存泄漏
1.定义
一般我们常说的内存泄漏是指堆内存的泄漏。堆内存是指程序从堆中分配的,大小任意的(内存块的大小可以在程序运行期决定),使用完后必须显示释放的内存。应用程序一般使用malloc,realloc,new等函数从堆中分配到一块内存,使用完后,程序必须负责相应的调用free或delete释放该内存块,否则,这块内存就不能被再次使用,我们就说这块内存泄漏了。
2.发生方式
- a. 常发性内存泄漏。发生内存泄漏的代码会被多次执行到,每次被执行的时候都会导致一块内存泄漏。
- b. 偶发性内存泄漏。发生内存泄漏的代码只有在某些特定环境或操作过程下才会发生。
- c. 一次性内存泄漏。发生内存泄漏的代码只会被执行一次,或者由于算法上的缺陷,导致总会有一块仅且一块内存发生泄漏。
- d. 隐式内存泄漏。程序在运行过程中不停的分配内存,但是直到结束的时候才释放内存。严格的说这里并没有发生内存泄漏,因为最终程序释放了所有申请的内存。但是对于一个服务器程序,需要运行几天,几周甚至几个月,不及时释放内存也可能导致最终耗尽系统的所有内存。所以,我们称这类内存泄漏为隐式内存泄漏
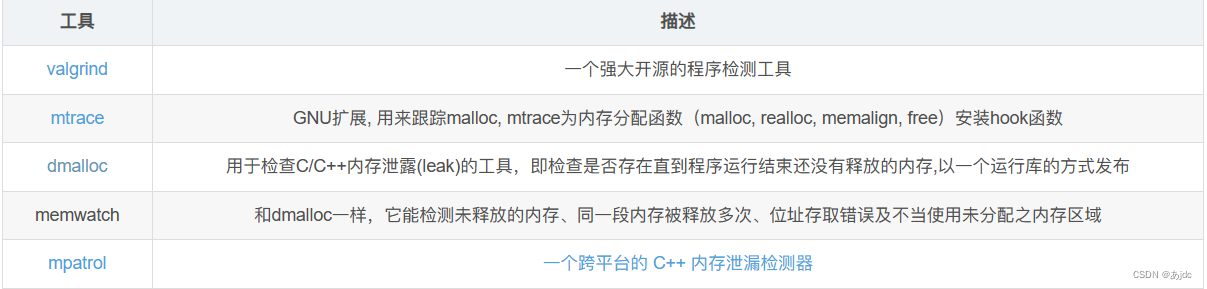
3.检测
检测内存泄漏的关键是要能截获住对分配内存和释放内存的函数的调用。截获住这两个函数,我们就能跟踪每一块内存的生命周期,比如,每当成功的分配一块内存后,就把它的指针加入一个全局的list中;每当释放一块内存,再把它的指针从list中删除。这样,当程序结束的时候,list中剩余的指针就是指向那些没有被释放的内存。这里只是简单的描述了检测内存泄漏的基本原理.
3.内存回收
许多 C 或者 C++ 程序员对垃圾回收嗤之以鼻,认为垃圾回收肯定比自己来管理动态内存要低效,而且在回收的时候一定会让程序停顿在那里,而如果自己控制内存管理的话,分配和释放时间都是稳定的,不会导致程序停顿。最后,很多 C/C++ 程序员坚信在C/C++ 中无法实现垃圾回收机制。这些错误的观点都是由于不了解垃圾回收的算法而臆想出来的。
其实垃圾回收机制并不慢,甚至比动态内存分配更高效。因为我们可以只分配不释放,那么分配内存的时候只需要从堆上一直的获得新的内存,移动堆顶的指针就够了;而释放的过程被省略了,自然也加快了速度。现代的垃圾回收算法已经发展了很多,增量收集算法已经可以让垃圾回收过程分段进行,避免打断程序的运行了。而传统的动态内存管理的算法同样有在适当的时间收集内存碎片的工作要做,并不比垃圾回收更有优势。
而垃圾回收的算法的基础通常基于扫描并标记当前可能被使用的所有内存块,从已经被分配的所有内存中把未标记的内存回收来做的。C/C++ 中无法实现垃圾回收的观点通常基于无法正确扫描出所有可能还会被使用的内存块,但是,看似不可能的事情实际上实现起来却并不复杂。首先,通过扫描内存的数据,指向堆上动态分配出来内存的指针是很容易被识别出来的,如果有识别错误,也只能是把一些不是指针的数据当成指针,而不会把指针当成非指针数据。这样,回收垃圾的过程只会漏回收掉而不会错误的把不应该回收的内存清理。其次,如果回溯所有内存块被引用的根,只可能存在于全局变量和当前的栈内,而全局变量(包括函数内的静态变量)都是集中存在于 bss 段或 data段中。
垃圾回收的时候,只需要扫描 bss 段, data 段以及当前被使用着的栈空间,找到可能是动态内存指针的量,把引用到的内存递归扫描就可以得到当前正在使用的所有动态内存了。
如果肯为你的工程实现一个不错的垃圾回收器,提高内存管理的速度,甚至减少总的内存消耗都是可能的。如果有兴趣的话,可以搜索一下网上已有的关于垃圾回收的论文和实现了的库,开拓视野对一个程序员尤为重要。














 3238
3238











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









