






前言
通过python调用相机然后间隔一段时间进行拍摄图片,进行识别提取。
提示:以下是本篇文章正文内容,下面案例可供参考
一、确保电脑存在相机等硬件设备
我的电脑没有相机硬件设备,于是我通过手机在局域网的状态下进行图像传输到电脑上,在这里特别推荐软件:DroidCam Client 建议大家按照情况自行安装。

二、主要使用代码
import os
import cv2
import time
import numpy as np
def py_nms(dets, thresh):#(模板匹配得到的符合范围的矩阵值,抑制的阈值)
"""Pure Python NMS baseline."""
# x1、y1、x2、y2、以及score赋值
# (x1、y1)(x2、y2)为box的左上和右下角标
x1 = dets[:, 0]
y1 = dets[:, 1]#左上角的坐标值
x2 = dets[:, 2]
y2 = dets[:, 3]#右下角的阈值
scores = dets[:, 4]
# 每一个候选框的面积
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
# order是按照score降序排序的,从大到小
order = scores.argsort()[::-1]
# print("order:",order)
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
# 计算当前概率最大矩形框与其他矩形框的相交框的坐标,会用到numpy的broadcast机制,得到的是向量
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
# 计算相交框的面积,注意矩形框不相交时w或h算出来会是负数,用0代替
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
# 计算重叠度IOU:重叠面积/(面积1+面积2-重叠面积)
ovr = inter / (areas[i] + areas[order[1:]] - inter)
# 找到重叠度不高于阈值的矩形框索引
inds = np.where(ovr <= thresh)[0]
# print("inds:",inds)
# 将order序列更新,由于前面得到的矩形框索引要比矩形框在原order序列中的索引小1,所以要把这个1加回来
order = order[inds + 1]
return keep
def template(img_gray, template_img, template_threshold):
'''
img_gray:待检测的灰度图片格式
template_img:模板小图,也是灰度化了
template_threshold:模板匹配的置信度
'''
h, w = template_img.shape[:2]#获取模板的高和宽
res = cv2.matchTemplate(img_gray, template_img, cv2.TM_CCOEFF_NORMED)#模板匹配的方式
start_time = time.time()
loc = np.where(res >= template_threshold) # 大于模板阈值的目标坐标,返回的就是矩阵的行列索引值,其中行坐标为坐标的y值,列坐标为x值
score = res[res >= template_threshold]# 大于模板阈值的目标置信度cv2.matchTemplate(img_gray, template_img, cv2.TM_CCOEFF_NORMED)[res >= template_threshold]完整写法
# 将模板数据坐标进行处理成左上角、右下角的格式
xmin = np.array(loc[1])#列坐标为x值
ymin = np.array(loc[0])#横坐标为y值
xmax = xmin + w
ymax = ymin + h
xmin = xmin.reshape(-1, 1) # 变成n行1列维度
xmax = xmax.reshape(-1, 1) # 变成n行1列维度
ymax = ymax.reshape(-1, 1) # 变成n行1列维度
ymin = ymin.reshape(-1, 1) # 变成n行1列维度
score = score.reshape(-1, 1) # 变成n行1列维度
data_hlist = []
data_hlist.append(xmin)
data_hlist.append(ymin)
data_hlist.append(xmax)
data_hlist.append(ymax)
data_hlist.append(score)
data_hstack = np.hstack(data_hlist) # 将xmin、ymin、xmax、yamx、scores按照列进行拼接 np.hstack():在水平方向上平铺 np.vstack():在竖直方向上堆叠
thresh = 0.3 # NMS里面的IOU交互比阈值
keep_dets = py_nms(data_hstack, thresh)#进行非极大值抑制
print("nms time:", time.time() - start_time) # 打印数据处理到nms运行时间
dets = data_hstack[keep_dets] # 最终的nms获得的矩形框
return dets
def saveresult(name,file,img_rgb):
isExists = os.path.exists("./"+ str(name)+'/')
if not isExists: # 判断如果文件不存在,则创建
os.makedirs("./"+ str(name)+'/')
print("./"+ str(name)+'/'+"目录创建成功")
out =str(file.split('.')[0])
filename="./"+ name+'/%s.jpg'%(out)
print('已匹配图片:'+filename)
cv2.imwrite(filename, img_rgb)
def savecut(name,file,cut):
isExists = os.path.exists("./"+ str(name)+'/')
if not isExists: # 判断如果文件不存在,则创建
os.makedirs("./"+ str(name)+'/')
print("./"+ str(name)+'/'+"目录创建成功")
out =str(file.split('.')[0])
filename="./"+ name+'/%s.jpg'%(out)
print('已裁切图片:'+filename)
cv2.imwrite(filename, cut)
def camera(camera, save_path):
cap = cv2.VideoCapture(camera) # 打开摄像头
'''
frame_width=cap.get(cv2.CAP_PROP_FRAME_WIDTH)#获得视频尺寸——宽
frame_height=cap.get(cv2.CAP_PROP_FRAME_HEIGHT)#高
fps = cap.get(cv2.CAP_PROP_FPS)#获取视频fps
print("[INFO]视频FPS:{}".format(fps))
print("[INFO]视频宽:{}".format(frame_width))
print("[INFO]视频高:{}".format(frame_height))
#frame_all_fps=cap.get(cv2.CAP_PROP_FRAME_COUNT)#获取视频总帧数
#print("[INFO]视频总帧数:{}".format(frame_all_fps))
'''
if not cap.isOpened():
print("未打开摄像头!")
else:
print("已打开摄像头,任务开始!")
frame_index = 1 # 图片计数
retval, frame = cap.read() # 这里是读取视频帧,第一个参数输出是否识别到,第二个参数输出识别到的图像帧
while retval: # 当读到图像帧时
if cv2.waitKey(1) & 0xFF == ord('q'): # 中断采集
break
if frame_index == 101: # 拍摄多少张停止
break
print(frame_index)
cv2.imshow("camera_frame", frame) # 显示视频帧
cv2.waitKey(100) # 间隔100ms拍摄一张图片
save1 = str(save_path) # jpg格式图片存放文件夹的路径
isExists = os.path.exists(save1)
if not isExists: # 判断如果文件不存在,则创建
os.makedirs(save1)
frame_name1 = f"camera_frame_{frame_index}.jpg"
frame_name2 = str(frame_name1.split('.')[0])
save1 = save1 + frame_name1
retval, frame = cap.read()
cv2.imwrite(save1, frame) # 保存拍摄的图片
file1 = os.path.join(save1)
img_rgb = cv2.imread(file1) # 需要检测的图片
img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY) # 转化成灰色
template_img = cv2.imread('mb.jpg', 0) # 模板小图
template_threshold = 0.5 # 模板置信度
dets = template(img_gray, template_img, template_threshold)
for coord in dets:
cv2.rectangle(img_rgb, (int(coord[0]), int(coord[1])), (int(coord[2]), int(coord[3])), (0, 0, 255),2)
saveresult('save', frame_name2, img_rgb)
if [int(coord[1]), int(coord[3]), int(coord[0]), int(coord[2])] == [0, 0, 0, 0]:
print("未识别到物体")
else:
cut = img_rgb[int(coord[1]):int(coord[3]), int(coord[0]):int(coord[2])] # 裁切坐标为(y0:y1,x0:x1)
savecut('savepicture', frame_name2, cut)
frame_index += 1
cv2.destroyAllWindows()
cap.release()
if __name__ == "__main__":
camera(0, "./images/") #启动相机然后保存拍摄的图片
print("***********************************************************************************")
print('** 已完成模板匹配任务 **')
print("***********************************************************************************")
"""
参数 propld 功能
cv2.CAP_PROP_POS_MSEC 0 视频文件的当前位置(以毫秒为单位)或视频捕获时间戳
cv2.CAP_PROP_POS_FRAMES 1 基于0的索引将被解码/捕获下一帧
cv2.CAP_PROP_POS_AVI_RATIO 2 视频文件的相对位置:0 - 视频的开始,1 - 视频的结束
cv2.CAP_PROP_FRAME_WIDTH 3 帧的宽度
cv2.CAP_PROP_FRAME_HEIGHT 4 帧的高度
cv2.CAP_PROP_FPS 5 帧速
cv2.CAP_PROP_FOURCC 6 4个字符表示的视频编码器格式
cv2.CAP_PROP_FRAME_COUNT 7 帧数
cv2.CAP_PROP_FORMAT 8 byretrieve()返回的Mat对象的格式
cv2.CAP_PROP_MODE 9 指示当前捕获模式的后端特定值
cv2.CAP_PROP_BRIGHTNESS 10 图像的亮度(仅适用于相机)
cv2.CAP_PROP_CONTRAST 11 图像对比度(仅适用于相机)
cv2.CAP_PROP_SATURATION 12 图像的饱和度(仅适用于相机)
cv2.CAP_PROP_HUE 13 图像的色相(仅适用于相机)
cv2.CAP_PROP_GAIN 14 图像的增益(仅适用于相机)
cv2.CAP_PROP_EXPOSURE 15 曝光(仅适用于相机)
cv2.CAP_PROP_CONVERT_RGB 16 表示图像是否应转换为RGB的布尔标志
cv2.CAP_PROP_WHITE_BALANCE 17 目前不支持
cv2.CAP_PROP_RECTIFICATION 18 立体摄像机的整流标志
"""
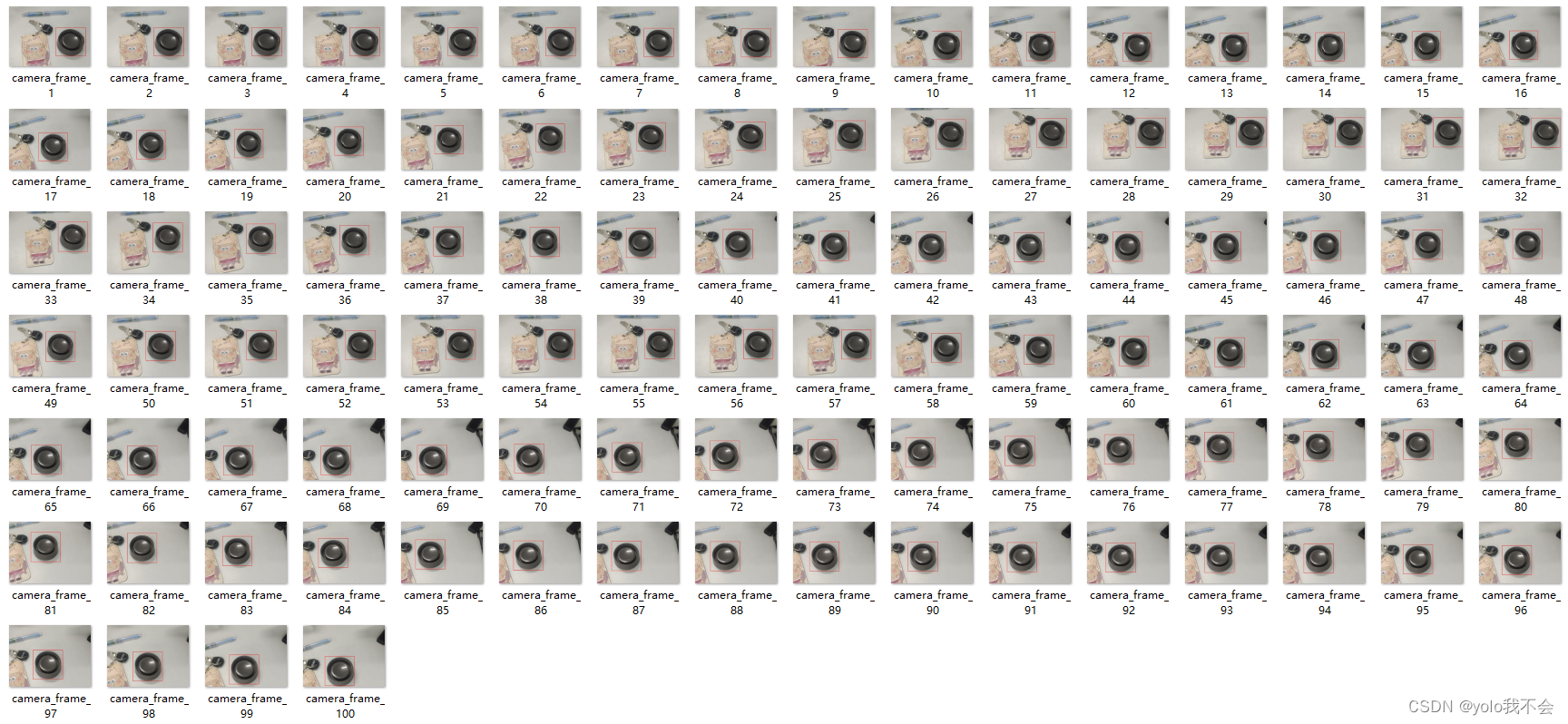
下面是效果展示
1.模板图像

2.拍摄图片

3.匹配效果
4.提取效果

















 7507
7507











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











