







一、机器人构成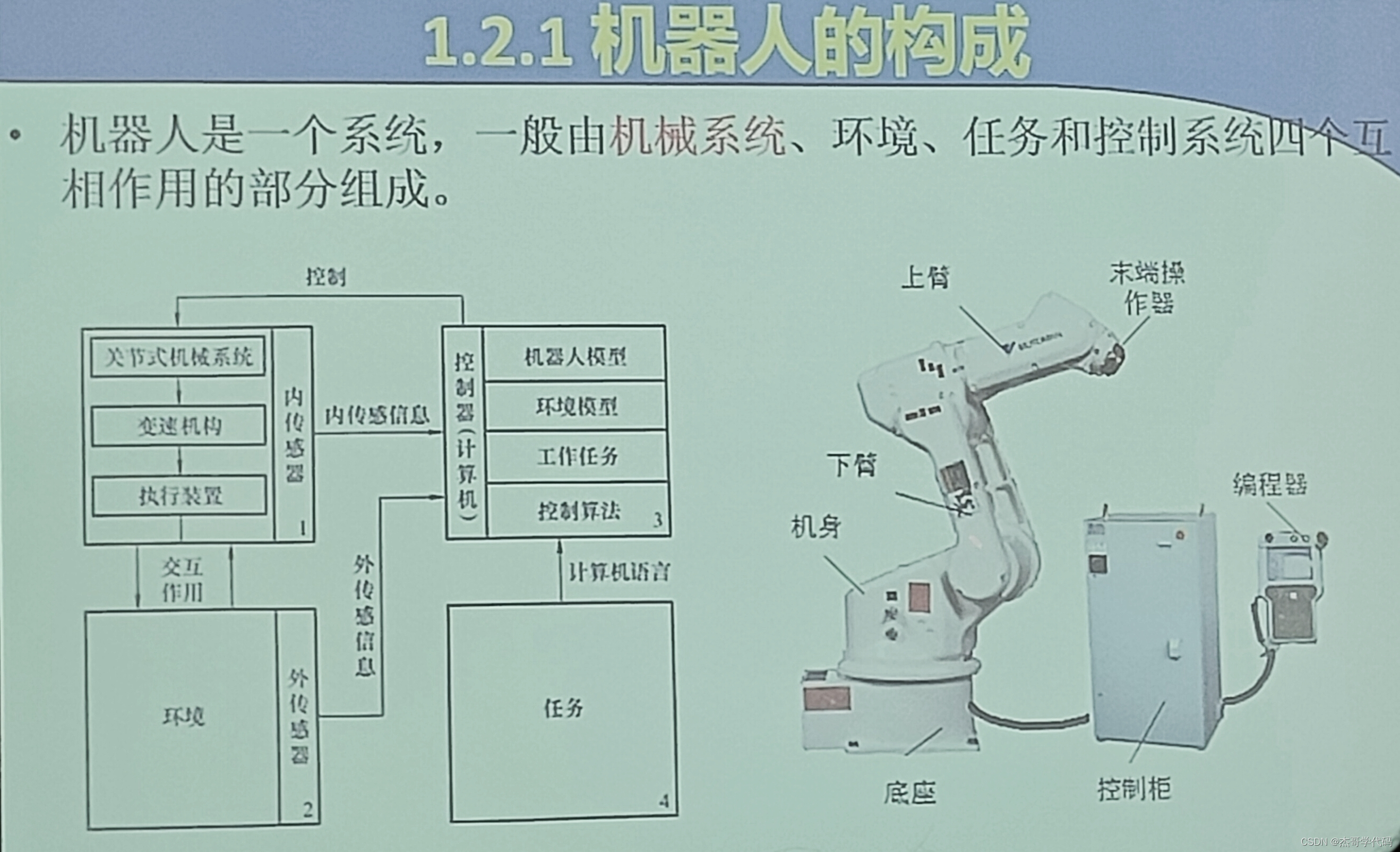
机器人系统:机械系统、环境(可达空间)、任务(用程序语言来描述任务,由控制器完成)、控制系统(控制器:计算机)
机械结构四要素:基座、关节、臂、末端执行装置(工具)
二、分类
按关节和关节间关系分为:串联机器人(开式运动链、连杆、利用驱动器驱动关节运动使得末端达到合适姿势)和并联机器人(两个以上运动链、形成闭合)
按控制方式分为:非伺服机器人(按编好程序、能力有限、插销板用来预先规定机器人的工作顺序并且由定序器按顺序连通驱动装置的能源)和伺服机器人(精准跟随或复现某过程的反馈控制系统、随机、自动控制系统、随时反馈)
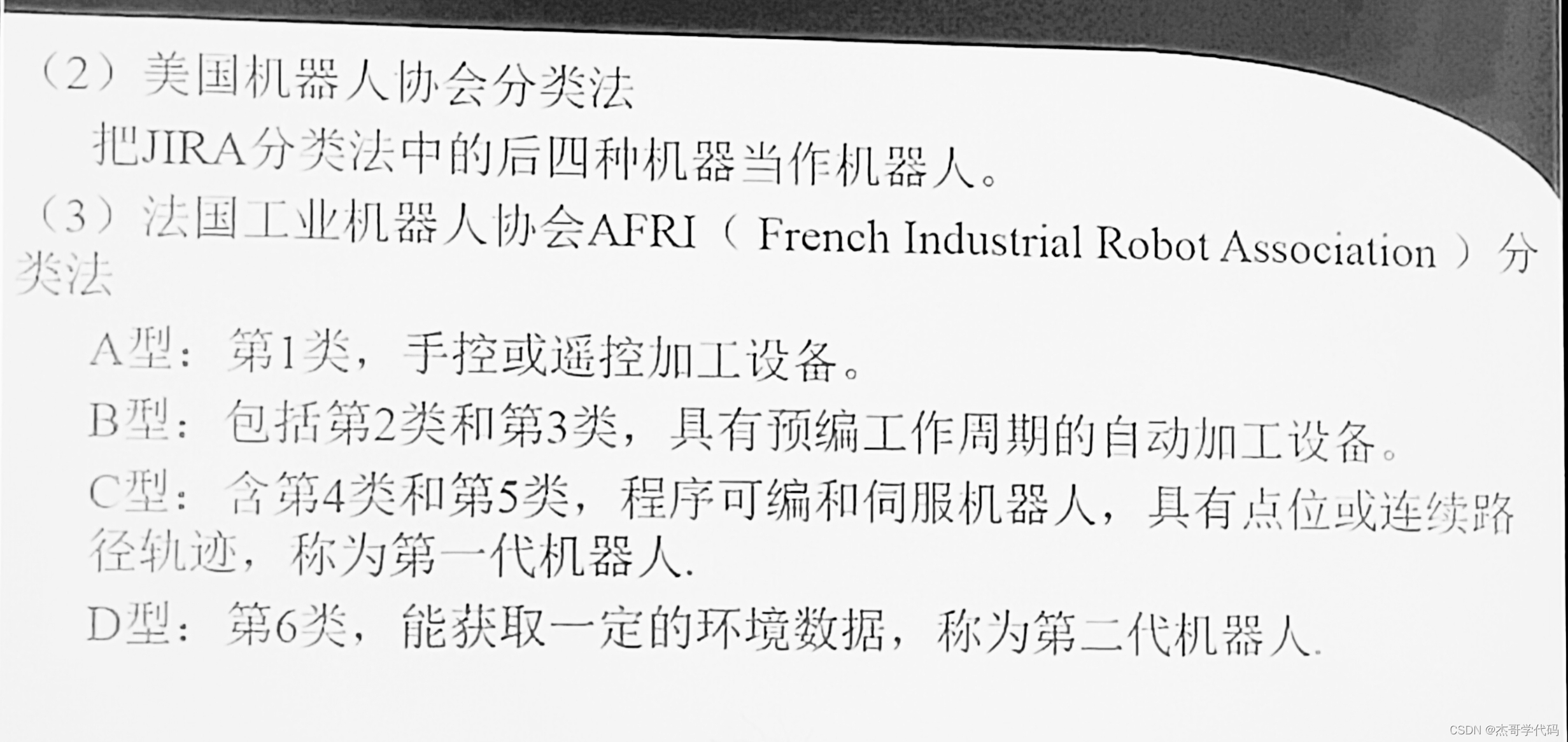
按控制器的信息输入方式分为: 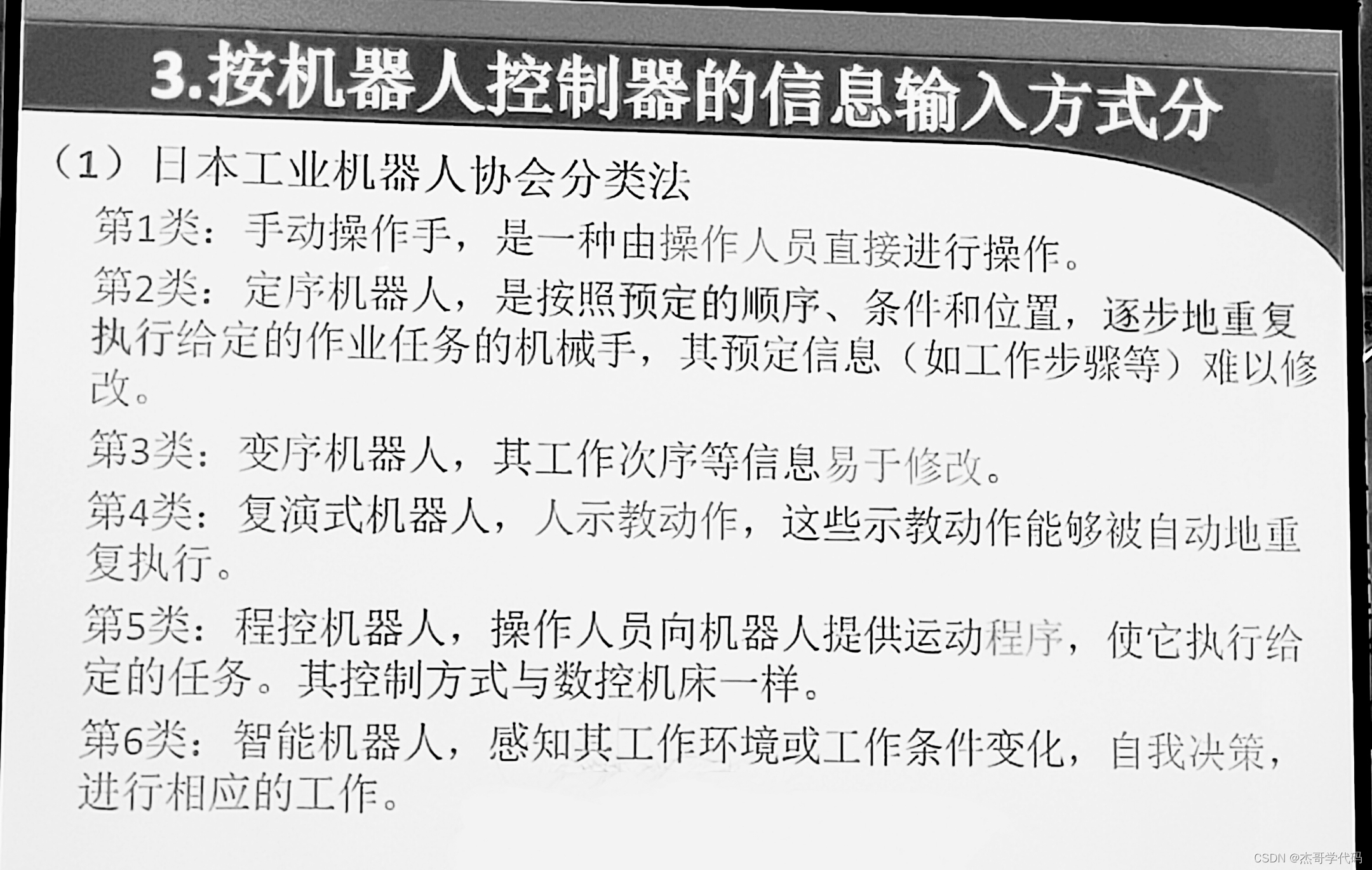
按用途分为:
产业类:农业、林业、工业等;
极限作业类:探索、宇宙探测等;
服务类:家用、娱乐、医疗;
军事类
三、并联机器人
应用:模拟航海船只运动、摇摇车
四、工业机器人的技术参数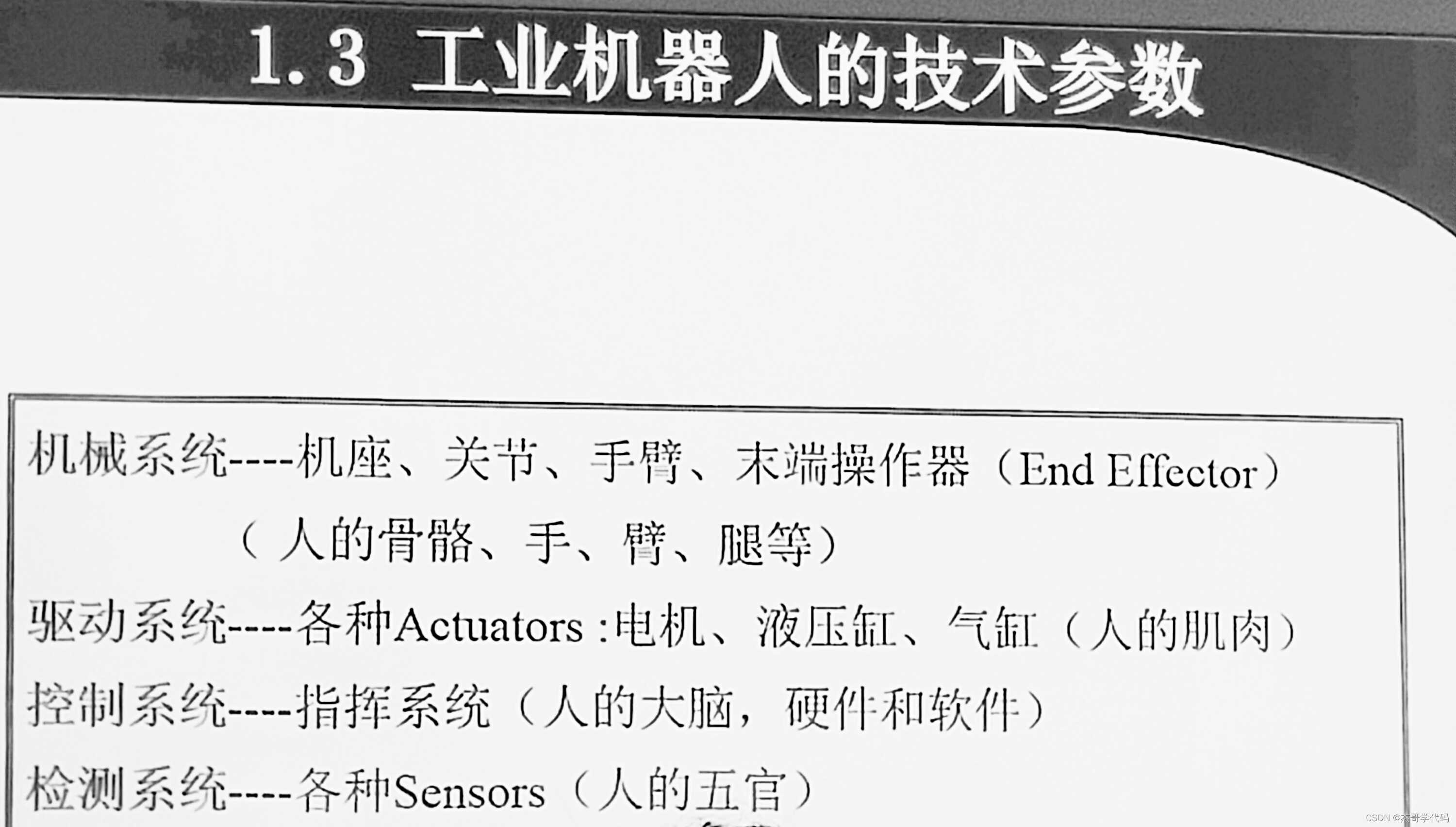
五、自由度
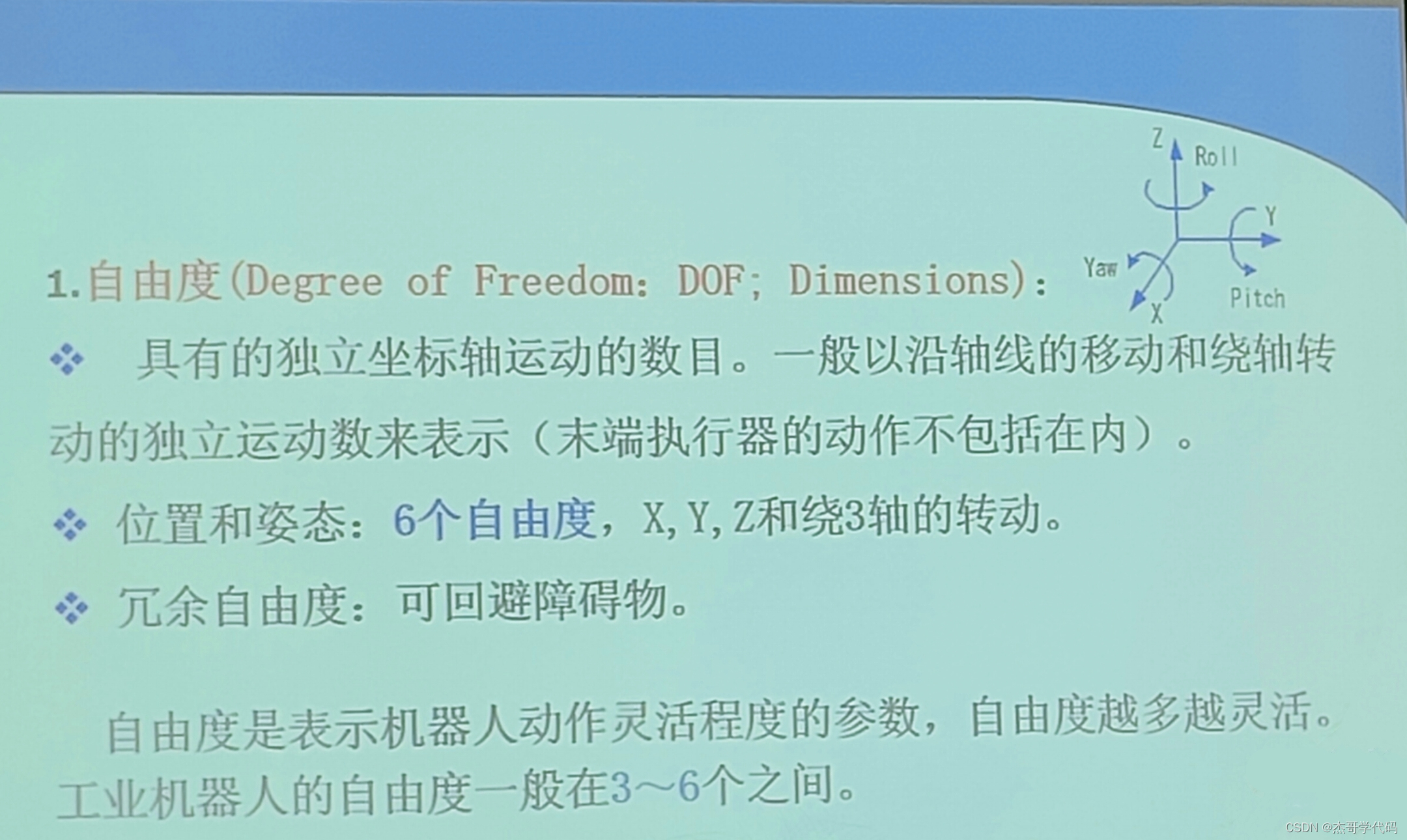
二维平面:三个自由度
三维立体:六个自由度(大多数机械手)
六、精度:定位精度和重复定位精度
国产与进口的差异所在
定位精度(正确性):实际位置和目标位置的差异
重复定位精度:重复定位于同一目标的能力,统计平均值(用来表示机器人的精度)
工业机器人具有绝对精度低,重复精度高的特点
七、工作范围
手臂末端或手腕中心所能到达的所有点的集合
死区(范围之外)
八、最大工作速度
自由度最大稳定速度或末端最大的合成速度
九、承载能力
在规定性能内,能承受负载的允许值
十、机器人的研究
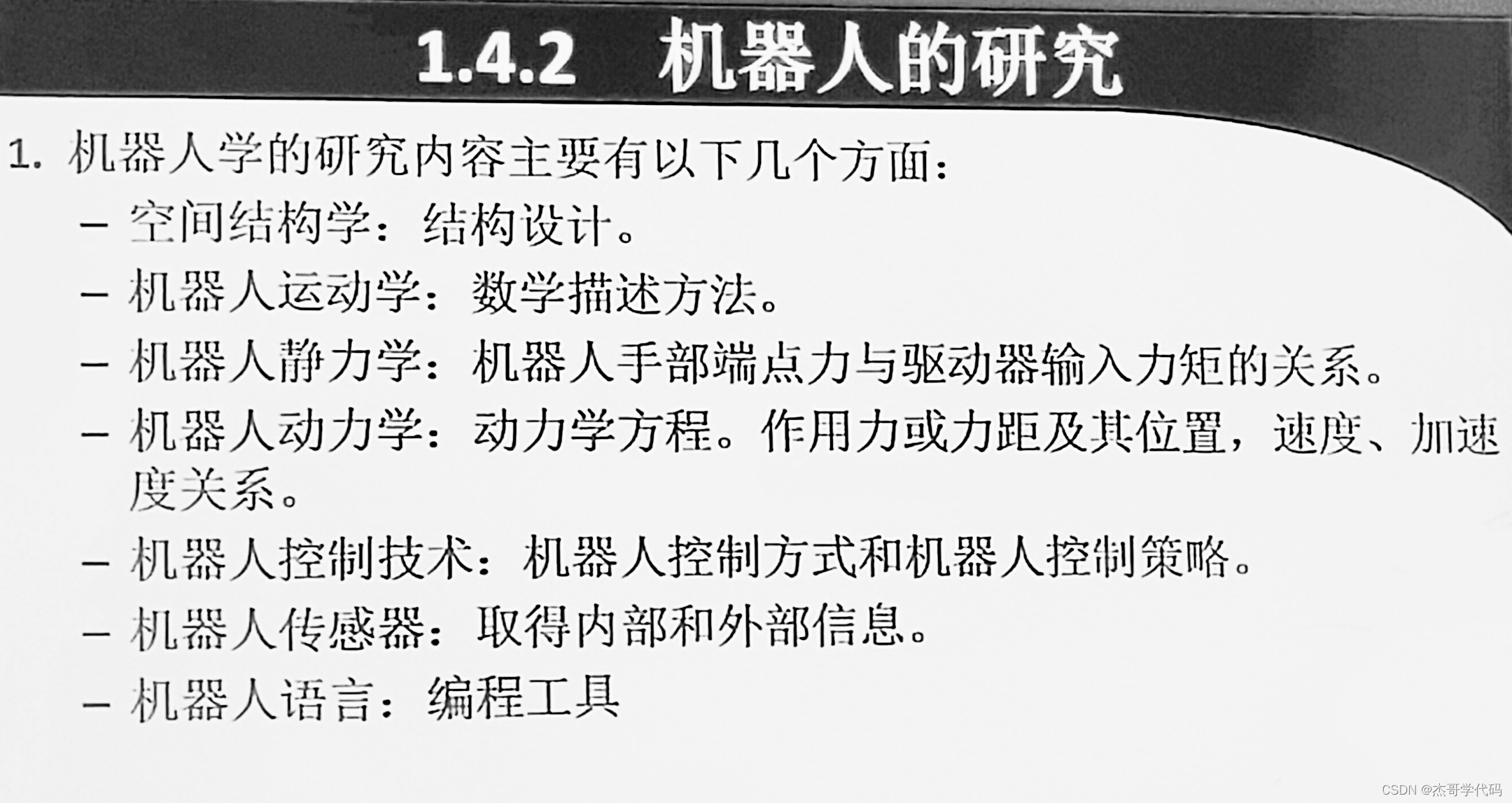
机器人学的研究内容、国内外研究成果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









