下载canutils和libsocketcan
https://public.pengutronix.de/software/libsocketcan/libsocketcan-0.0.11.tar.bz2
https://public.pengutronix.de/software/socket-can/canutils/v4.0/canutils-4.0.6.tar.bz2
编译libsocketcan
tar -jxvf libsocketcan-0.0.11.tar.bz2
cd ./libsocketcan-0.0.11
mkdir out
./configure --host=arm-linux-gnueabihf --prefix=/home/canutils_tools/libsocketcan-0.0.11/out
make
make install
生成的库在out/lib目录下
编译canutils
//先将 libsocketcan 里面的头文件 libsocketcan.h can_netlink.h 复制到 canutils 的 include 里面
tar -jxvf canutils-4.0.6.tar.bz2
cd ./canutils-4.0.6
mkdir out
./configure --host=arm-linux-gnueabihf --prefix=/home/canutils_tools/canutils-4.0.6/out libsocketcan_LIBS=-lsocketcan LDFLAGS="-L/home/canutils_tools/libsocketcan-0.0.11/out/lib/" libsocketcan_CFLAGS="-I/home/canutils_tools/libsocketcan-0.0.11/out/include"
make
make install







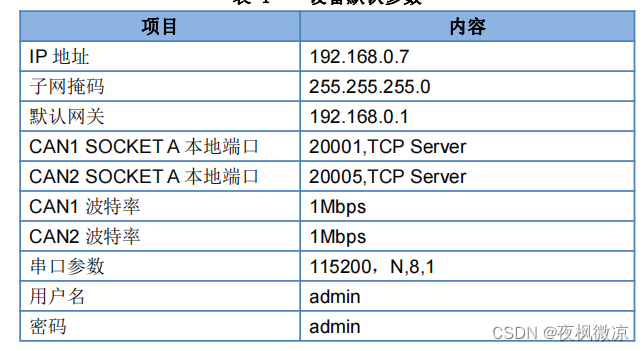
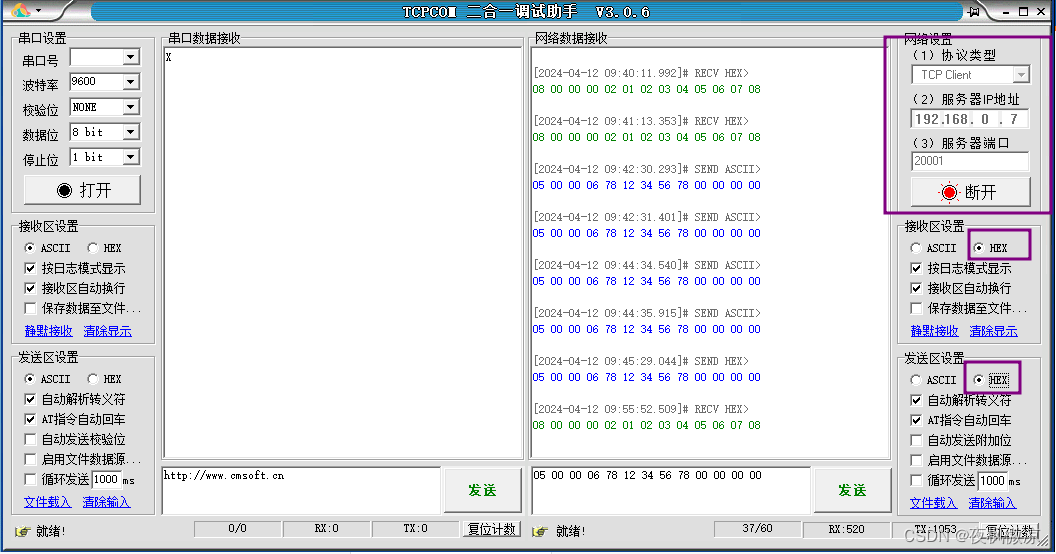
 本文详细介绍了如何根据设备树配置Rockchip平台的CAN总线驱动,包括驱动程序定位、内核编译及加载,同时指导了canutils工具的下载、编译和环境设置,以及USR-CANET200模块的连接和配置,以及调试软件的使用方法。
本文详细介绍了如何根据设备树配置Rockchip平台的CAN总线驱动,包括驱动程序定位、内核编译及加载,同时指导了canutils工具的下载、编译和环境设置,以及USR-CANET200模块的连接和配置,以及调试软件的使用方法。
















 8232
8232

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









