






技术上包括两个步骤:
首先,它通过从激光雷达分支学习重要细节来丰富雷达的局部特征,以缓解高度信息缺失和极端稀疏性带来的问题;其次,它将激光雷达特征和增强雷达特征结合在一个统一的鸟瞰图中。
Bi - LRFusion框架的五个主要组件:
(a) 激光雷达BEV特征流:用于对来自激光雷达数据的激光雷达BEV(鸟瞰图)特征进行编码。这一步骤主要是处理激光雷达获取的数据,提取出鸟瞰图特征。
(b) 雷达特征流:用于对来自雷达数据的雷达BEV特征进行编码。这与(a)相对应,是处理雷达数据的步骤。
(c) LiDAR到雷达(L2R)融合模块:由基于查询的高度特征融合块和基于查询的BEV特征融合块组成。在这个模块中,从LiDAR原始点和LiDAR特征增强雷达特征,即利用激光雷达数据来改善雷达数据的特征。
(d) 雷达到激光雷达(R2L)融合模块:用于将增强的雷达特征融合回以激光雷达为中心的探测网络。这一步是将经过(c)处理后的雷达特征融合回激光雷达探测网络。
(e) BEV探测网络:该网络使用R2L融合模块的特征来预测动态物体的3D边界框。这个网络的主要功能是基于融合后的特征来检测和定位动态物体。
方法:
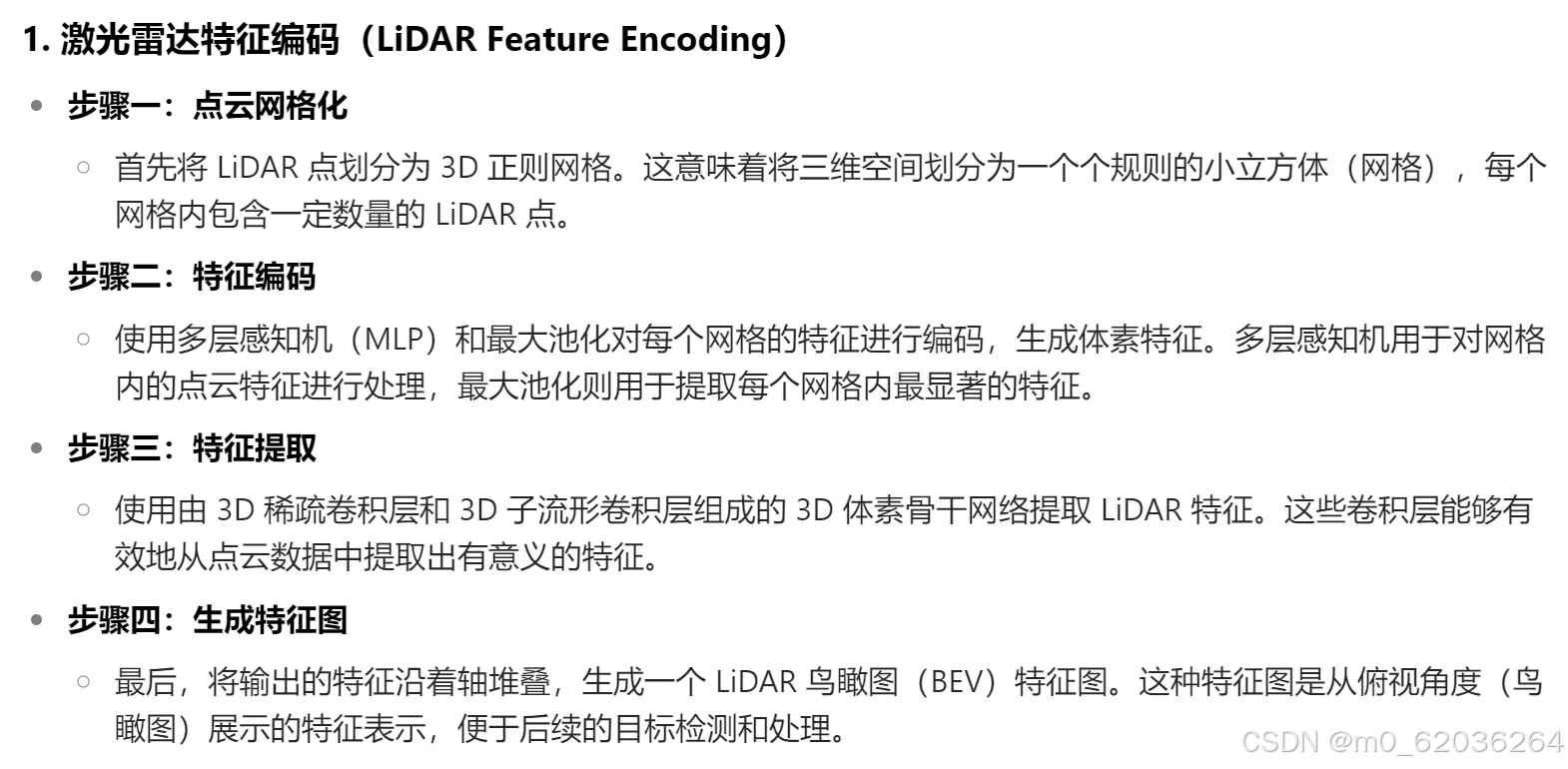
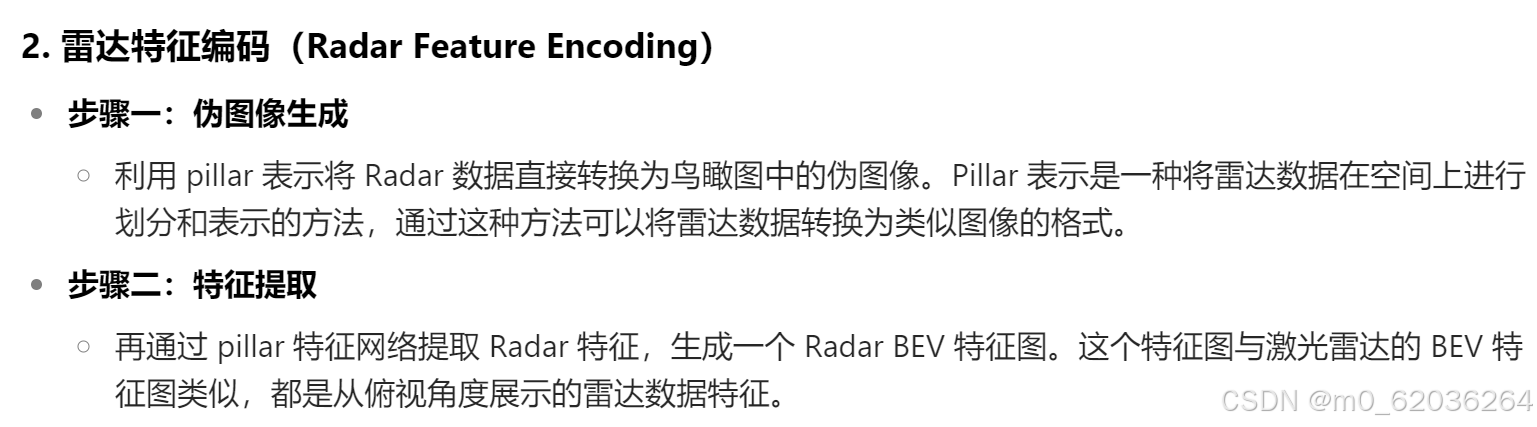
一、模态特定特征编码
二、LiDAR-to-Radar Fusion
Query-based L2R Height Feature Fusion(QHF)和Query-based L2R BEV Feature Fusion(QBF)都是基于查询机制的特征融合方法
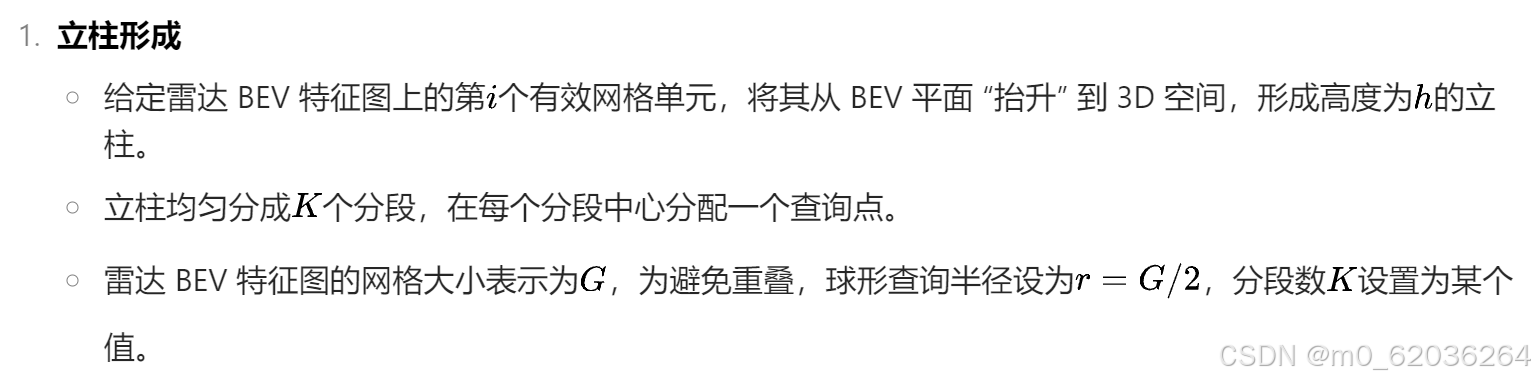
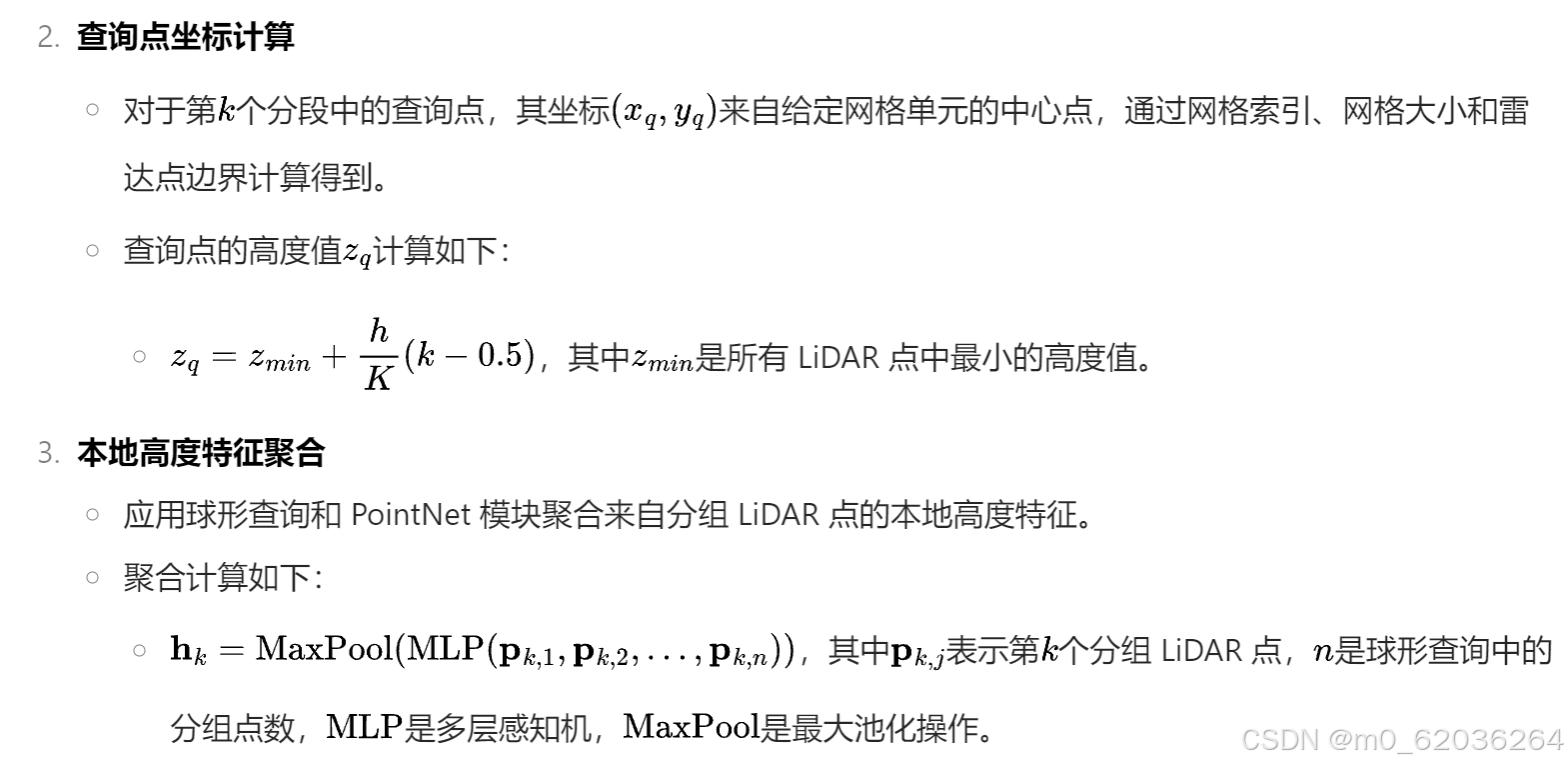
QHF
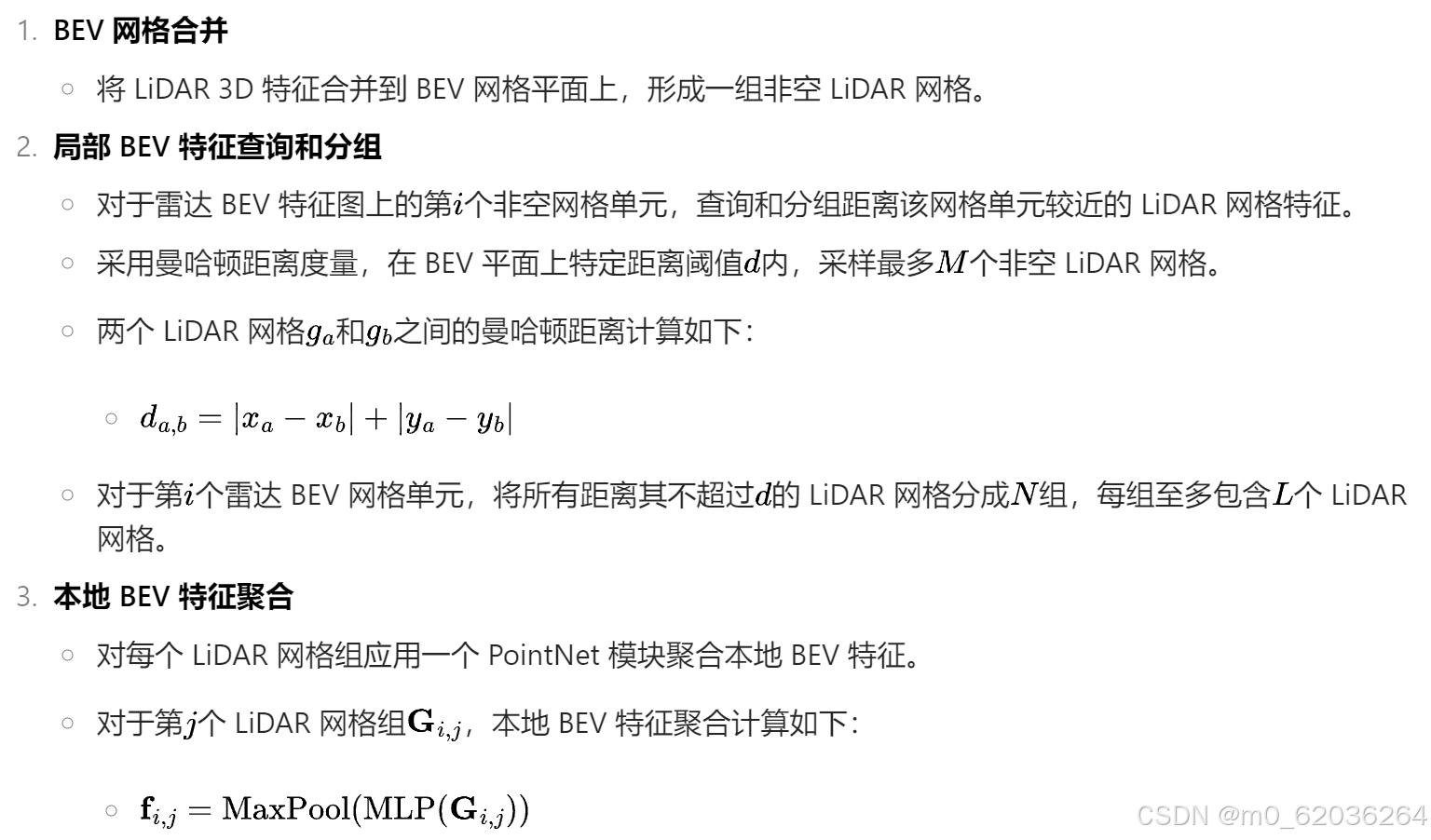
QBF
三、Radar-to-LiDAR Fusion
四、BEV Detection Network


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









