









目录
数据集介绍
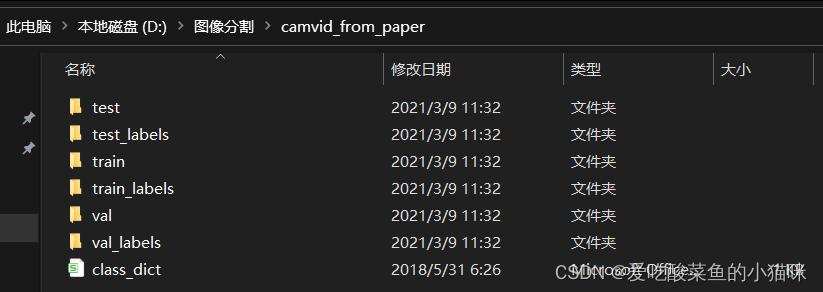
采用Camvid驾驶场景数据集,其中包含701张驾驶场景语义分割图像,划分为训练集、验证集、测试集,分别有367、101、233个图像。
数据集目录如下:
数据集下载链接
链接:https://pan.baidu.com/s/1HLviQ3AUU7jinWX0YCMWtA?pwd=aaaa
提取码:aaaa
Dataset函数-读取数据
数据读取步骤
1. 读哪些数据: sampler输出的index
2. 从哪里读数据:Dataset中的root_dir(路径)
3. 怎么读数据:Dataset中的__getitem__(self,index)函数,根据索引index读取数据(需要自己写重点写的函数)
label介绍
截取train_labels中的部分label
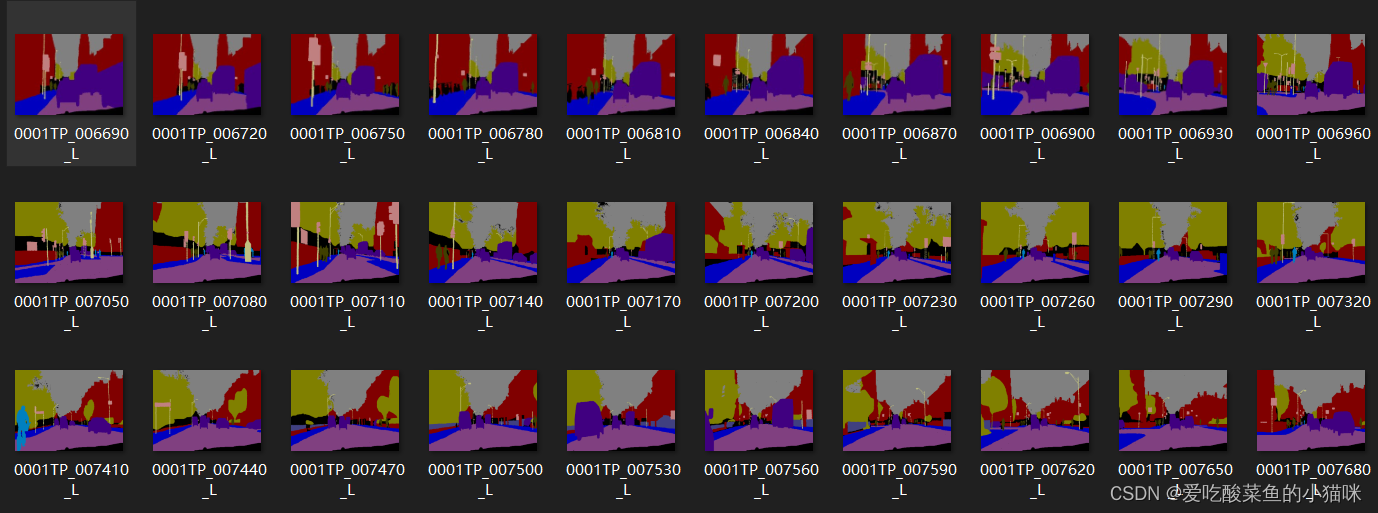
可以看到:不同于图像分类中的label,为具体确定的标签0 1 2 ...11(整张图代表一个类别);图像分割中的label为彩色RGB三通道的图,不同颜色代表不同类别(整张图逐像素被划分为不同类别),颜色与类别的对应表见class_dict.csv中。(一共有12个类别)
标签编码方式
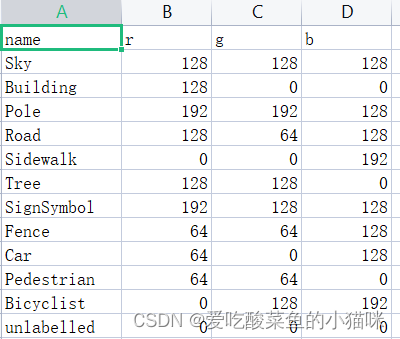
读取class_dict.csv文件,生成colormap:
colormap=[[128, 128, 128],[128, 0, 0],[192, 192, 128],[128, 64, 128],[0, 0, 192],[128, 128, 0][192, 128, 128],[64, 64, 128],[64, 0, 128],[64, 64, 0],[0, 128, 192],[0, 0, 0]]
(一共12个类别,用列表中元素的下标colormap.index(a)表示元素a的类别)
读取任意一张label,将其shape由 (h,w,3)->(h,w),(h,w)中每个元素代表当前像素点的类别
import numpy as np
from PIL import Image
colormap=[[128, 128, 128],[128, 0, 0], [192, 192, 128],[128, 64, 128],[0, 0, 192],[128, 128, 0],[192, 128, 128],[64, 64, 128],[64, 0, 128],[64, 64, 0],[0, 128, 192],[0, 0, 0]]
label_path=r'D:\图像分割\camvid_from_paper\train_labels\0001TP_006690_L.png'
label=Image.open(label_path)
label = np.array(label) # 此时label.shape=(h,w,3)
h, w, _ = label.shape
label = label.tolist() # 将label转化为list,三维列表
# 遍历label中的每一个元素,为RGB三通道颜色,例如[128,0,0]
for i in range(h):
for j in range(w):
label[i][j] = colormap.index(label[i][j]) # colormap中元素的下标0-11作为类别0-11
label = np.array(label,dtype='int64').reshape((h, w)) # reshape为(h,w)
print(label)此代码定义在完整代码LabelProcessor.cm2label函数中
完整代码(CamvidDataset函数)
from PIL import Image
from torch.utils.data import Dataset,DataLoader
import pandas as pd
import numpy as np
import torchvision.transforms as transforms
import os
import torch
class LabelProcessor:
cls_num = 12
def __init__(self,file_path):
"""
self.colormap 颜色表 [[128,128,128],[128,0,0],[],...,[]] ['r','g','b']
self.names 类别名
"""
self.colormap,self.names=self.read_color_map(file_path)
def read_color_map(self,file_path):
# 读取csv文件
pd_read_color=pd.read_csv(file_path)
colormap=[]
names=[]
for i in range(len(pd_read_color)):
temp=pd_read_color.iloc[i] # DataFrame格式的按行切片
color=[temp['r'],temp['g'],temp['b']]
colormap.append(color)
names.append(temp['name'])
return colormap,names
def cm2label(self,label):
"""将RGB三通道label (h,w,3)转化为 (h,w)大小,每一个值为当前像素点的类别"""
label = np.array(label)
h, w, _ = label.shape
label = label.tolist()
for i in range(h):
for j in range(w):
label[i][j] = self.colormap.index(label[i][j])
label = np.array(label,dtype='int64').reshape((h, w))
return label
class CamvidDataset(Dataset):
def __init__(self,img_dir,label_dir,file_path):
"""
:param img_dir: 图片路径
:param label_dir: 图片对应的label路径
:param file_path: csv文件(colormap)路径
"""
self.img_dir=img_dir
self.label_dir=label_dir
self.imgs=self.read_file(self.img_dir)
self.labels=self.read_file(self.label_dir)
self.label_processor=LabelProcessor(file_path)
# 类别总数与以及类别名
self.cls_num=self.label_processor.cls_num
self.names=self.label_processor.names
def __getitem__(self, index):
"""根据index下标索引对应的img以及label"""
img=self.imgs[index]
label=self.labels[index]
img=Image.open(img)
label=Image.open(label)
img,label=self.img_transform(img,label)
return img,label
def __len__(self):
if len(self.imgs)==0:
raise Exception('Please check your img_dir'.format(self.img_dir))
return len(self.imgs)
def read_file(self,path):
"""生成每个图片路径名的列表,用于getitem中索引"""
file_path=os.listdir(path)
file_path_list=[os.path.join(path,img_name) for img_name in file_path]
file_path_list.sort()
return file_path_list
def img_transform(self,img,label):
"""对图片做transform"""
transform_img=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225]),
])
img=transform_img(img)
label = self.label_processor.cm2label(label)
label=torch.from_numpy(label) # numpy转化为tensor
return img,label
if __name__=='__main__':
# 路径
root_dir='D:\图像分割\camvid_from_paper'
img_path = os.path.join(root_dir,'train')
label_path = os.path.join(root_dir,'train_labels')
file_path = os.path.join(root_dir,'class_dict.csv')
train_data=CamvidDataset(img_path,label_path,file_path)
train_loader=DataLoader(train_data,batch_size=8,shuffle=True,num_workers=0)
for i,data in enumerate(train_loader):
img_data,label_data=data
print(img_data.shape,type(img_data))
print(label_data.shape,type(label_data))
输出结果:
torch.Size([8, 3, 360, 480]) <class 'torch.Tensor'>
torch.Size([8, 360, 480]) <class 'torch.Tensor'>
(其中label_data中的每个元素均为0-11之间的数字)















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









