









功能简介
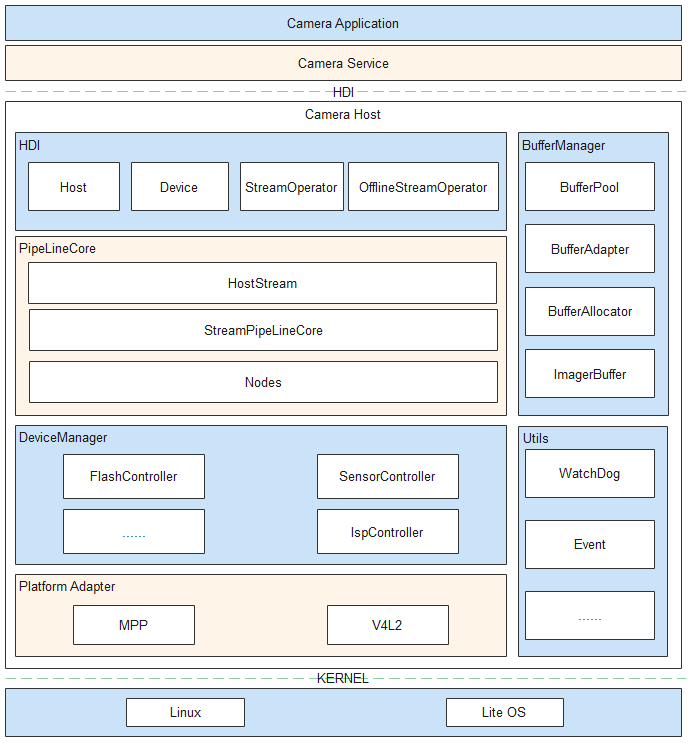
OpenHarmony相机驱动框架模型对上实现相机HDI(Hardware Device Interface)接口,对下实现相机Pipeline模型,管理相机各个硬件设备。 该驱动框架模型内部分为三层,依次为HDI实现层、框架层和设备适配层。各层基本概念如下:
- HDI实现层:实现OHOS(OpenHarmony Operation System)相机标准南向接口。
- 框架层:对接HDI实现层的控制、流的转发,实现数据通路的搭建,管理相机各个硬件设备等功能。
- 设备适配层:屏蔽底层芯片和OS(Operation System)差异,支持多平台适配。
运作机制
Camera模块主要包含服务、设备的初始化,数据通路的搭建,流的配置、创建、下发、捕获等,具体运作机制参考以下图文解析:
图 1 基于HDF驱动框架的Camera驱动模型
-
系统启动时创建camera_host进程。进程创建后,首先枚举底层设备,创建(也可以通过配置表创建)管理设备树的DeviceManager类及其内部各个底层设备的对象,创建对应的CameraHost类实例并且将其注册到UHDF(用户态HDF驱动框架)服务中,方便相机服务层通过UHDF服务获取底层CameraDeviceHost的服务,从而操作硬件设备。
-
Service通过CameraDeviceHost服务获取CameraHost实例,CameraHost可以获取底层的Camera能力,开启闪光灯、调用Open接口打开Camera创建连接、创建DeviceManager(负责底层硬件模块上电)、创建CameraDevice(向上提供设备控制接口)。创建CameraDevice时会实例化PipelineCore的各个子模块,其中StreamPipelineCore负责创建Pipeline,MetaQueueManager负责上报metaData。
-
Service通过CameraDevice模块配置流、创建Stream类。StreamPipelineStrategy模块通过上层下发的模式和查询配置表创建对应流的Node连接方式,StreamPipelineBuilder模块创建Node实例并且连接返回该Pipeline给StreamPipelineDispatcher。StreamPipelineDispatcher提供统一的Pipeline调用管理。
-
Service通过Stream控制整个流的操作,AttachBufferQueue接口将从显示模块申请的BufferQueue下发到底层,由CameraDeviceDriverModel自行管理buffer,当Capture接口下发命令后,底层开始向上传递buffer。Pipeline的IspNode依次从BufferQueue获取指定数量buffer,然后下发到底层ISP(Image Signal Processor,图像信号处理器)硬件,ISP填充完之后将buffer传递给CameraDeviceDriverModel,CameraDeviceDriverModel通过循环线程将buffer填充到已经创建好的Pipeline中,各个Node处理后通过回调传递给上层,同时buffer返回BufferQueue等待下一次下发。
-
Service通过Capture接口下发拍照命令。ChangeToOfflineStream接口查询拍照buffer位置,如果ISP已经出图,并且图像数据已经送到IPP node,可以将普通拍照流转换为离线流,否则直接走关闭流程。ChangeToOfflineStream接口通过传递StreamInfo使离线流获取到普通流的流信息,并且通过配置表确认离线流的具体Node连接方式,创建离线流的Node连接(如果已创建则通过CloseCamera释放非离线流所需的Node),等待buffer从底层Pipeline回传到上层再释放持有的Pipeline相关资源。
-
Service通过CameraDevice的UpdateSettings接口向下发送CaptureSetting参数,CameraDeviceDriverModel通过StreamPipelineDispatcher模块向各个Node转发,StartStreamingCapture和Capture接口携带的CaptureSetting通过StreamPipelineDispatcher模块向该流所属的Node转发。
-
Service通过EnableResult和DisableResult接口控制底层metaData的上报。如果需要底层metaData上报,pipeline会创建CameraDeviceDriverModel内部的一个Bufferqueue用来收集和传递metaData,根据StreamPipelineStrategy模块查询配置表并通过StreamPipelineBuilder创建和连接Node,MetaQueueManager下发buffer至底层,底层相关Node填充数据,MetaQueueManager模块再调用上层回调传递给上层。
-
Service调用CameraDevice的Close接口,CameraDevice调用对应的DeviceManager模块对各个硬件下电;如果此时在Ipp的SubPipeline中存在OfflineStream,则需要保留OfflineStream,直到执行完毕。
-
动态帧率控制。在StreamOperator中起一个CollectBuffer线程,CollectBuffer线程从每一路stream的BufferQueue中获取buffer,如果某一路流的帧率需要控制(为sensor出帧帧率的1/n),可以根据需求控制每一帧的buffer打包,并决定是否collect此路流的buffer(比如sensor出帧帧率为120fps,预览流的帧率为30fps,CollectBuffer线程collect预览流的buffer时,每隔4fps collect一次)。
开发指导
场景介绍
Camera模块主要针对相机预览、拍照、视频流等场景,对这些场景下的相机操作进行封装,使开发者更易操作相机硬件,提高开发效率。
接口说明
注:以下接口列举的为IDL接口描述生成的对应C++语言函数接口,接口声明见idl文件/drivers/interface/camera/v1_1/,获取路径为:drivers_interface: 暂无描述 - Gitee.com。 在HDI使用中下发的配置参数不能超出GetCameraAbility上报的能力范围。即使通过UpdateSettings、CommitStreams、Capture等接口可以下发超出该范围的配置参数,且接口调用不会返回失败,但设置后的行为是不确定的。
-
icamera_device.h
功能描述 接口名称 获取流控制器 int32_t GetStreamOperator_V1_1(
const sptr<OHOS::HDI::Camera::V1_0::IStreamOperatorCallback>& callbackObj,
sptr<OHOS::HDI::Camera::V1_1::IStreamOperator>& streamOperator
) -
icamera_host.h
功能描述 接口名称 打开Camera设备 int32_t OpenCamera_V1_1(
const std::string& cameraId,
const sptr<OHOS::HDI::Camera::V1_0::ICameraDeviceCallback>& callbackObj,
sptr<OHOS::HDI::Camera::V1_1::ICameraDevice>& device
)预启动摄像头设备 int32_t PreLaunch(const PrelaunchConfig& config) -
istream_operator.h
功能描述 接口名称 查询是否支持添加参数对应的流 int32_t IsStreamsSupported_V1_1(
OperationMode mode,
const std::vector<uint8_t>& modeSetting,
const std::vector<StreamInfo_V1_1>& infos,
StreamSupportType& type
)创建流 int32_t CreateStreams_V1_1(const std::vector<StreamInfo_V1_1>& streamInfos)
开发步骤
Camera驱动的开发过程主要包含以下步骤:
-
注册CameraHost
定义Camera的HdfDriverEntry结构体,该结构体中定义了CameraHost初始化的方法(代码目录drivers/peripheral/camera/interfaces/hdi_ipc/camera_host_driver.cpp)。
struct HdfDriverEntry g_cameraHostDriverEntry = { .moduleVersion = 1, .moduleName = "camera_service", .Bind = HdfCameraHostDriverBind, .Init = HdfCameraHostDriverInit, .Release = HdfCameraHostDriverRelease, }; HDF_INIT(g_cameraHostDriverEntry); // 将Camera的HdfDriverEntry结构体注册到HDF上 -
初始化Host服务
步骤1中提到的HdfCameraHostDriverBind接口提供了CameraServiceDispatch和CameraHostStubInstance的注册。CameraServiceDispatch接口是远端调用CameraHost的方法,如OpenCamera(),SetFlashlight()等,CameraHostStubInstance接口是Camera设备的初始化,在开机时被调用。
static int HdfCameraHostDriverBind(struct HdfDeviceObject *deviceObject) { HDF_LOGI("HdfCameraHostDriverBind enter"); auto *hdfCameraHostHost = new (std::nothrow) HdfCameraHostHost; if (hdfCameraHostHost == nullptr) { HDF_LOGE("%{public}s: failed to create HdfCameraHostHost object", __func__); return HDF_FAILURE; } hdfCameraHostHost->ioService.Dispatch = CameraHostDriverDispatch; // 提供远端CameraHost调用方法 hdfCameraHostHost->ioService.Open = NULL; hdfCameraHostHost->ioService.Release = NULL; auto serviceImpl = ICameraHost::Get(true); if (serviceImpl == nullptr) { HDF_LOGE("%{public}s: failed to get of implement service", __func__); delete hdfCameraHostHost; return HDF_FAILURE; } hdfCameraHostHost->stub = OHOS::HDI::ObjectCollector::GetInstance().GetOrNewObject(serviceImpl, ICameraHost::GetDescriptor()); // 初始化Camera设备 if (hdfCameraHostHost->stub == nullptr) { HDF_LOGE("%{public}s: failed to get stub object", __func__); delete hdfCameraHostHost; return HDF_FAILURE; } deviceObject->service = &hdfCameraHostHost->ioService; return HDF_SUCCESS; }下面的函数是远端CameraHost调用的方法:
int32_t CameraHostStub::CameraHostServiceStubOnRemoteRequest(int cmdId, MessageParcel &data, MessageParcel &reply, MessageOption &option) { switch(cmdId) { case CMD_CAMERA_HOST_SET_CALLBACK: { return CameraHostStubSetCallback(data, reply, option); } case CMD_CAMERA_HOST_GET_CAMERAID: { return CameraHostStubGetCameraIds(data, reply, option); } case CMD_CAMERA_HOST_GET_CAMERA_ABILITY: { return CameraHostStubGetCameraAbility(data, reply, option); } case CMD_CAMERA_HOST_OPEN_CAMERA: { return CameraHostStubOpenCamera(data, reply, option); } case CMD_CAMERA_HOST_SET_FLASH_LIGHT: { return CameraHostStubSetFlashlight(data, reply, option); } default: { HDF_LOGE("%s: not support cmd %d", __func__, cmdId); return HDF_ERR_INVALID_PARAM; } } return HDF_SUCCESS; }CameraHostStubInstance()接口最终调用CameraHostImpl::Init()方法,该方法会获取物理Camera,并对DeviceManager和PipelineCore进行初始化。
-
获取Host服务
调用Get()接口从远端CameraService中获取CameraHost对象。get()方法如下:
sptr<ICameraHost> ICameraHost::Get(const char *serviceName) { do { using namespace OHOS::HDI::ServiceManager::V1_0; auto servMgr = IServiceManager::Get(); if (servMgr == nullptr) { HDF_LOGE("%s: IServiceManager failed!", __func__); break; } auto remote = servMgr->GetService(serviceName); // 根据serviceName名称获取CameraHost if (remote != nullptr) { sptr<CameraHostProxy> hostSptr = iface_cast<CameraHostProxy>(remote); // 将CameraHostProxy对象返回给调用者,该对象中包含OpenCamera()等方法。 return hostSptr; } HDF_LOGE("%s: GetService failed! serviceName = %s", __func__, serviceName); } while(false); HDF_LOGE("%s: get %s failed!", __func__, serviceName); return nullptr; } -
打开设备
CameraHostProxy对象中有五个方法,分别是SetCallback、GetCameraIds、GetCameraAbility、OpenCamera和SetFlashlight。下面着重描述OpenCamera接口。 CameraHostProxy的OpenCamera()接口通过CMD_CAMERA_HOST_OPEN_CAMERA调用远端CameraHostStubOpenCamera()接口并获取ICameraDevice对象。
int32_t CameraHostProxy::OpenCamera(const std::string& cameraId, const sptr<ICameraDeviceCallback>& callbackObj, sptr<ICameraDevice>& device) { MessageParcel cameraHostData; MessageParcel cameraHostReply; MessageOption cameraHostOption(MessageOption::TF_SYNC); if (!cameraHostData.WriteInterfaceToken(ICameraHost::GetDescriptor())) { HDF_LOGE("%{public}s: failed to write interface descriptor!", __func__); return HDF_ERR_INVALID_PARAM; } if (!cameraHostData.WriteCString(cameraId.c_str())) { HDF_LOGE("%{public}s: write cameraId failed!", __func__); return HDF_ERR_INVALID_PARAM; } if (!cameraHostData.WriteRemoteObject(OHOS::HDI::ObjectCollector::GetInstance().GetOrNewObject(callbackObj, ICameraDeviceCallback::GetDescriptor()))) { HDF_LOGE("%{public}s: write callbackObj failed!", __func__); return HDF_ERR_INVALID_PARAM; } int32_t cameraHostRet = Remote()->SendRequest(CMD_CAMERA_HOST_OPEN_CAMERA, cameraHostData, cameraHostReply, cameraHostOption); if (cameraHostRet != HDF_SUCCESS) { HDF_LOGE("%{public}s failed, error code is %{public}d", __func__, cameraHostRet); return cameraHostRet; } device = hdi_facecast<ICameraDevice>(cameraHostReply.ReadRemoteObject()); return cameraHostRet; }Remote()->SendRequest调用上文提到的CameraHostServiceStubOnRemoteRequest(),根据cmdId进入CameraHostStubOpenCamera()接口,最终调用CameraHostImpl::OpenCamera(),该接口获取了CameraDevice并对硬件进行上电等操作。
int32_t CameraHostImpl::OpenCamera(const std::string& cameraId, const sptr<ICameraDeviceCallback>& callbackObj, sptr<ICameraDevice>& device) { CAMERA_LOGD("OpenCamera entry"); DFX_LOCAL_HITRACE_BEGIN; if (CameraIdInvalid(cameraId) != RC_OK || callbackObj == nullptr) { CAMERA_LOGW("open camera id is empty or callback is null."); return INVALID_ARGUMENT; } auto itr = cameraDeviceMap_.find(cameraId); if (itr == cameraDeviceMap_.end()) { CAMERA_LOGE("camera device not found."); return INSUFFICIENT_RESOURCES; } CAMERA_LOGD("OpenCamera cameraId find success."); std::shared_ptr<CameraDeviceImpl> cameraDevice = itr->second; if (cameraDevice == nullptr) { CAMERA_LOGE("camera device is null."); return INSUFFICIENT_RESOURCES; } CamRetCode ret = cameraDevice->SetCallback(callbackObj); CHECK_IF_NOT_EQUAL_RETURN_VALUE(ret, HDI::Camera::V1_0::NO_ERROR, ret); CameraHostConfig *config = CameraHostConfig::GetInstance(); CHECK_IF_PTR_NULL_RETURN_VALUE(config, INVALID_ARGUMENT); std::vector<std::string> phyCameraIds; RetCode rc = config->GetPhysicCameraIds(cameraId, phyCameraIds); if (rc != RC_OK) { CAMERA_LOGE("get physic cameraId failed."); return DEVICE_ERROR; } if (CameraPowerUp(cameraId, phyCameraIds) != RC_OK) { // 对Camera硬件上电 CAMERA_LOGE("camera powerup failed."); CameraPowerDown(phyCameraIds); return DEVICE_ERROR; } auto sptrDevice = deviceBackup_.find(cameraId); if (sptrDevice == deviceBackup_.end()) { #ifdef CAMERA_BUILT_ON_OHOS_LITE deviceBackup_[cameraId] = cameraDevice; #else deviceBackup_[cameraId] = cameraDevice.get(); #endif } device = deviceBackup_[cameraId]; cameraDevice->SetStatus(true); CAMERA_LOGD("open camera success."); DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
获取流
CameraDeviceImpl定义了GetStreamOperator、UpdateSettings、SetResultMode和GetEnabledResult等方法,获取流操作方法如下:
int32_t CameraDeviceImpl::GetStreamOperator(const sptr<IStreamOperatorCallback>& callbackObj, sptr<IStreamOperator>& streamOperator) { HDI_DEVICE_PLACE_A_WATCHDOG; DFX_LOCAL_HITRACE_BEGIN; if (callbackObj == nullptr) { CAMERA_LOGW("input callback is null."); return INVALID_ARGUMENT; } spCameraDeciceCallback_ = callbackObj; if (spStreamOperator_ == nullptr) { #ifdef CAMERA_BUILT_ON_OHOS_LITE // 这里创建一个spStreamOperator_ 对象传递给调用者,以便对stream进行各种操作 spStreamOperator_ = std::make_shared<StreamOperator>(spCameraDeciceCallback_, shared_from_this()); #else spStreamOperator_ = new(std::nothrow) StreamOperator(spCameraDeciceCallback_, shared_from_this()); #endif if (spStreamOperator_ == nullptr) { CAMERA_LOGW("create stream operator failed."); return DEVICE_ERROR; } spStreamOperator_->Init(); ismOperator_ = spStreamOperator_; } streamOperator = ismOperator_; #ifndef CAMERA_BUILT_ON_OHOS_LITE CAMERA_LOGI("CameraDeviceImpl %{public}s: line: %{public}d", __FUNCTION__, __LINE__); pipelineCore_->GetStreamPipelineCore()->SetCallback( [this](const std::shared_ptr<CameraMetadata> &metadata) { OnMetadataChanged(metadata); }); #endif DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
创建流
调用CreateStreams创建流前需要填充StreamInfo结构体,具体内容如下:
using StreamInfo = struct _StreamInfo { int streamId_; int width_; // 数据流宽 int height_; // 数据流高 int format_; // 数据流格式,如PIXEL_FMT_YCRCB_420_SP int dataSpace_; StreamIntent intent_; // StreamIntent 如PREVIEW bool tunneledMode_; BufferProducerSequenceable bufferQueue_; // 数据流bufferQueue可用streamCustomer->CreateProducer()接口创建 int minFrameDuration_; EncodeType encodeType_; };CreateStreams()接口是StreamOperator(StreamOperatorImpl类是StreamOperator的基类)类中的方法,该接口的主要作用是创建一个StreamBase对象,通过StreamBase的Init方法初始化CreateBufferPool等操作。
int32_t StreamOperator::CreateStreams(const std::vector<StreamInfo>& streamInfos) { PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; for (const auto& it : streamInfos) { CHECK_IF_NOT_EQUAL_RETURN_VALUE(CheckStreamInfo(it), true, INVALID_ARGUMENT); CAMERA_LOGI("streamId:%{public}d and format:%{public}d and width:%{public}d and height:%{public}d", it.streamId_, it.format_, it.width_, it.height_); if (streamMap_.count(it.streamId_) > 0) { CAMERA_LOGE("stream [id = %{public}d] has already been created.", it.streamId_); return INVALID_ARGUMENT; } std::shared_ptr<IStream> stream = StreamFactory::Instance().CreateShared( // 创建Stream实例 IStream::g_availableStreamType[it.intent_], it.streamId_, it.intent_, pipelineCore_, messenger_); if (stream == nullptr) { CAMERA_LOGE("create stream [id = %{public}d] failed.", it.streamId_); return INSUFFICIENT_RESOURCES; } StreamConfiguration scg; StreamInfoToStreamConfiguration(scg, it); RetCode rc = stream->ConfigStream(scg); if (rc != RC_OK) { CAMERA_LOGE("configure stream %{public}d failed", it.streamId_); return INVALID_ARGUMENT; } if (!scg.tunnelMode && (it.bufferQueue_)->producer_ != nullptr) { CAMERA_LOGE("stream [id:%{public}d] is not tunnel mode, can't bind a buffer producer", it.streamId_); return INVALID_ARGUMENT; } if ((it.bufferQueue_)->producer_ != nullptr) { auto tunnel = std::make_shared<StreamTunnel>(); CHECK_IF_PTR_NULL_RETURN_VALUE(tunnel, INSUFFICIENT_RESOURCES); rc = tunnel->AttachBufferQueue((it.bufferQueue_)->producer_); CHECK_IF_NOT_EQUAL_RETURN_VALUE(rc, RC_OK, INVALID_ARGUMENT); if (stream->AttachStreamTunnel(tunnel) != RC_OK) { CAMERA_LOGE("attach buffer queue to stream [id = %{public}d] failed", it.streamId_); return INVALID_ARGUMENT; } } { std::lock_guard<std::mutex> l(streamLock_); streamMap_[stream->GetStreamId()] = stream; } CAMERA_LOGI("create stream success [id:%{public}d] [type:%{public}s]", stream->GetStreamId(), IStream::g_availableStreamType[it.intent_].c_str()); } DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
配置流
CommitStreams()是配置流的接口,必须在创建流之后调用,其主要作用是初始化Pipeline和创建Pipeline。
int32_t StreamOperator::CommitStreams(OperationMode mode, const std::vector<uint8_t>& modeSetting) { CAMERA_LOGV("enter"); CHECK_IF_PTR_NULL_RETURN_VALUE(streamPipeline_, DEVICE_ERROR); PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); if (modeSetting.empty()) { CAMERA_LOGE("input vector is empty"); return INVALID_ARGUMENT; } DFX_LOCAL_HITRACE_BEGIN; std::vector<StreamConfiguration> configs = {}; { std::lock_guard<std::mutex> l(streamLock_); std::transform(streamMap_.begin(), streamMap_.end(), std::back_inserter(configs), [](auto &iter) { return iter.second->GetStreamAttribute(); }); } std::shared_ptr<CameraMetadata> setting; MetadataUtils::ConvertVecToMetadata(modeSetting, setting); DynamicStreamSwitchMode method = streamPipeline_->CheckStreamsSupported(mode, setting, configs); if (method == DYNAMIC_STREAM_SWITCH_NOT_SUPPORT) { return INVALID_ARGUMENT; } if (method == DYNAMIC_STREAM_SWITCH_NEED_INNER_RESTART) { std::lock_guard<std::mutex> l(streamLock_); for (auto it : streamMap_) { it.second->StopStream(); } } { std::lock_guard<std::mutex> l(streamLock_); for (auto it : streamMap_) { if (it.second->CommitStream() != RC_OK) { CAMERA_LOGE("commit stream [id = %{public}d] failed.", it.first); return DEVICE_ERROR; } } } RetCode rc = streamPipeline_->PreConfig(setting); // 设备流配置 if (rc != RC_OK) { CAMERA_LOGE("prepare mode settings failed"); return DEVICE_ERROR; } rc = streamPipeline_->CreatePipeline(mode); // 创建一个pipeline if (rc != RC_OK) { CAMERA_LOGE("create pipeline failed."); return INVALID_ARGUMENT; } DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
捕获图像
在调用Capture()接口前需要先填充CaptureInfo结构体,具体内容如下:
using CaptureInfo = struct _CaptureInfo { int[] streamIds_; // 需要Capture的streamIds unsigned char[] captureSetting_; // 这里填充camera ability 可通过CameraHost 的GetCameraAbility()接口获取 bool enableShutterCallback_; };StreamOperator中的Capture方法主要是捕获数据流:
int32_t StreamOperator::Capture(int32_t captureId, const CaptureInfo& info, bool isStreaming) { CHECK_IF_EQUAL_RETURN_VALUE(captureId < 0, true, INVALID_ARGUMENT); PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; for (auto id : info.streamIds_) { std::lock_guard<std::mutex> l(streamLock_); auto it = streamMap_.find(id); if (it == streamMap_.end()) { return INVALID_ARGUMENT; } } { std::lock_guard<std::mutex> l(requestLock_); auto itr = requestMap_.find(captureId); if (itr != requestMap_.end()) { return INVALID_ARGUMENT; } } std::shared_ptr<CameraMetadata> captureSetting; MetadataUtils::ConvertVecToMetadata(info.captureSetting_, captureSetting); CaptureSetting setting = captureSetting; auto request = std::make_shared<CaptureRequest>(captureId, info.streamIds_.size(), setting, info.enableShutterCallback_, isStreaming); for (auto id : info.streamIds_) { RetCode rc = streamMap_[id]->AddRequest(request); if (rc != RC_OK) { return DEVICE_ERROR; } } { std::lock_guard<std::mutex> l(requestLock_); requestMap_[captureId] = request; } return HDI::Camera::V1_0::NO_ERROR; } -
取消捕获和释放离线流
StreamOperator类中的CancelCapture()接口的主要作用是根据captureId取消数据流的捕获。
int32_t StreamOperator::CancelCapture(int32_t captureId) { CHECK_IF_EQUAL_RETURN_VALUE(captureId < 0, true, INVALID_ARGUMENT); PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; std::lock_guard<std::mutex> l(requestLock_); auto itr = requestMap_.find(captureId); // 根据captureId 在Map中查找对应的CameraCapture对象 if (itr == requestMap_.end()) { CAMERA_LOGE("can't cancel capture [id = %{public}d], this capture doesn't exist", captureId); return INVALID_ARGUMENT; } RetCode rc = itr->second->Cancel(); // 调用CameraCapture中Cancel方法结束数据捕获 if (rc != RC_OK) { return DEVICE_ERROR; } requestMap_.erase(itr); // 擦除该CameraCapture对象 DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; }StreamOperator类中的ReleaseStreams接口的主要作用是释放之前通过CreateStream()和CommitStreams()接口创建的流,并销毁Pipeline。
int32_t StreamOperator::ReleaseStreams(const std::vector<int32_t>& streamIds) { PLACE_A_NOKILL_WATCHDOG(requestTimeoutCB_); DFX_LOCAL_HITRACE_BEGIN; for (auto id : streamIds) { std::lock_guard<std::mutex> l(streamLock_); auto it = streamMap_.find(id); if (it == streamMap_.end()) { continue; } if (it->second->IsRunning()) { it->second->StopStream(); } it->second->DumpStatsInfo(); streamMap_.erase(it); } for (auto id : streamIds) { CHECK_IF_EQUAL_RETURN_VALUE(id < 0, true, INVALID_ARGUMENT); } DFX_LOCAL_HITRACE_END; return HDI::Camera::V1_0::NO_ERROR; } -
关闭Camera设备
调用CameraDeviceImpl中的Close()来关闭CameraDevice,该接口调用deviceManager中的PowerDown()来给设备下电。
开发实例
在/drivers/peripheral/camera/test/demo目录下有一个关于Camera的demo,开机后会在/vendor/bin下生成可执行文件ohos_camera_demo,该demo可以完成Camera的预览,拍照等基础功能。下面我们就以此demo为例讲述怎样用HDI接口去编写预览PreviewOn()和拍照CaptureON()的用例,可参考ohos_camera_demo。
-
在main函数中构造一个CameraDemo 对象,该对象中有对Camera初始化、启停流、释放等控制的方法。下面mainDemo->InitSensors()函数为初始化CameraHost,mainDemo->InitCameraDevice()函数为初始化CameraDevice。
int main(int argc, char** argv) { RetCode rc = RC_OK; auto mainDemo = std::make_shared<CameraDemo>(); rc = mainDemo->InitSensors(); // 初始化CameraHost if (rc == RC_ERROR) { CAMERA_LOGE("main test: mainDemo->InitSensors() error\n"); return -1; } rc = mainDemo->InitCameraDevice(); // 初始化CameraDevice if (rc == RC_ERROR) { CAMERA_LOGE("main test: mainDemo->InitCameraDevice() error\n"); return -1; } rc = PreviewOn(0, mainDemo); // 配流和启流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn() error demo exit"); return -1; } ManuList(mainDemo, argc, argv); // 打印菜单到控制台 return RC_OK; }初始化CameraHost函数实现如下,这里调用了HDI接口ICameraHost::Get()去获取demoCameraHost,并对其设置回调函数。
RetCode OhosCameraDemo::InitSensors() { int rc = 0; CAMERA_LOGD("demo test: InitSensors enter"); if (demoCameraHost_ != nullptr) { return RC_OK; } #ifdef CAMERA_BUILT_ON_OHOS_LITE demoCameraHost_ = OHOS::Camera::CameraHost::CreateCameraHost(); #else constexpr const char *DEMO_SERVICE_NAME = "camera_service"; demoCameraHost_ = ICameraHost::Get(DEMO_SERVICE_NAME, false); #endif if (demoCameraHost_ == nullptr) { CAMERA_LOGE("demo test: ICameraHost::Get error"); return RC_ERROR; } #ifdef CAMERA_BUILT_ON_OHOS_LITE hostCallback_ = std::make_shared<DemoCameraHostCallback>(); #else hostCallback_ = new DemoCameraHostCallback(); #endif rc = demoCameraHost_->SetCallback(hostCallback_); if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: demoCameraHost_->SetCallback(hostCallback_) error"); return RC_ERROR; } CAMERA_LOGD("demo test: InitSensors exit"); return RC_OK; }初始化CameraDevice函数实现如下,这里调用了GetCameraIds(cameraIds_),GetCameraAbility(cameraId, ability_),OpenCamera(cameraIds_.front(), callback, demoCameraDevice_)等接口实现了demoCameraHost的获取。
RetCode OhosCameraDemo::InitCameraDevice() { int rc = 0; CAMERA_LOGD("demo test: InitCameraDevice enter"); if (demoCameraHost_ == nullptr) { CAMERA_LOGE("demo test: InitCameraDevice demoCameraHost_ == nullptr"); return RC_ERROR; } (void)demoCameraHost_->GetCameraIds(cameraIds_); if (cameraIds_.empty()) { return RC_ERROR; } const std::string cameraId = cameraIds_.front(); demoCameraHost_->GetCameraAbility(cameraId, cameraAbility_); MetadataUtils::ConvertVecToMetadata(cameraAbility_, ability_); GetFaceDetectMode(ability_); GetFocalLength(ability_); GetAvailableFocusModes(ability_); GetAvailableExposureModes(ability_); GetExposureCompensationRange(ability_); GetExposureCompensationSteps(ability_); GetAvailableMeterModes(ability_); GetAvailableFlashModes(ability_); GetMirrorSupported(ability_); GetStreamBasicConfigurations(ability_); GetFpsRange(ability_); GetCameraPosition(ability_); GetCameraType(ability_); GetCameraConnectionType(ability_); GetFaceDetectMaxNum(ability_); #ifdef CAMERA_BUILT_ON_OHOS_LITE std::shared_ptr<CameraDeviceCallback> callback = std::make_shared<CameraDeviceCallback>(); #else sptr<DemoCameraDeviceCallback> callback = new DemoCameraDeviceCallback(); #endif rc = demoCameraHost_->OpenCamera(cameraIds_.front(), callback, demoCameraDevice_); if (rc != HDI::Camera::V1_0::NO_ERROR || demoCameraDevice_ == nullptr) { CAMERA_LOGE("demo test: InitCameraDevice OpenCamera failed"); return RC_ERROR; } CAMERA_LOGD("demo test: InitCameraDevice exit"); return RC_OK; } -
PreviewOn()接口包含配置流、开启预览流和启动Capture动作。该接口执行完成后Camera预览通路已经开始运转并开启了两路流,一路流是preview,另外一路流是capture或者video,两路流中仅对preview流进行capture动作。
static RetCode PreviewOn(int mode, const std::shared_ptr<OhosCameraDemo>& mainDemo) { RetCode rc = RC_OK; CAMERA_LOGD("main test: PreviewOn enter"); rc = mainDemo->StartPreviewStream(); // 配置preview流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn StartPreviewStream error"); return RC_ERROR; } if (mode == 0) { rc = mainDemo->StartCaptureStream(); // 配置capture流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn StartCaptureStream error"); return RC_ERROR; } } else { rc = mainDemo->StartVideoStream(); // 配置video流 if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn StartVideoStream error"); return RC_ERROR; } } rc = mainDemo->CaptureON(STREAM_ID_PREVIEW, CAPTURE_ID_PREVIEW, CAPTURE_PREVIEW); if (rc != RC_OK) { CAMERA_LOGE("main test: PreviewOn mainDemo->CaptureON() preview error"); return RC_ERROR; } CAMERA_LOGD("main test: PreviewOn exit"); return RC_OK; }StartCaptureStream()、StartVideoStream()和StartPreviewStream()接口都会调用CreateStream()接口,只是传入的参数不同。
CreateStream()方法调用HDI接口去配置和创建流,首先调用HDI接口去获取StreamOperation对象,然后创建一个StreamInfo。调用CreateStreams()和CommitStreams()实际创建流并配置流。
RetCode OhosCameraDemo::CreateStream(const int streamId, std::shared_ptr<StreamCustomer> &streamCustomer, StreamIntent intent) { int rc = 0; CAMERA_LOGD("demo test: CreateStream enter"); GetStreamOpt(); // 获取StreamOperator对象 if (streamOperator_ == nullptr) { CAMERA_LOGE("demo test: CreateStream GetStreamOpt() is nullptr\n"); return RC_ERROR; } StreamInfo streamInfo = {0}; SetStreamInfo(streamInfo, streamCustomer, streamId, intent); // 填充StreamInfo流 if (streamInfo.bufferQueue_->producer_ == nullptr) { CAMERA_LOGE("demo test: CreateStream CreateProducer(); is nullptr\n"); return RC_ERROR; } std::vector<StreamInfo> streamInfos; streamInfos.push_back(streamInfo); rc = streamOperator_->CreateStreams(streamInfos); // 创建流 if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: CreateStream CreateStreams error\n"); return RC_ERROR; } rc = streamOperator_->CommitStreams(NORMAL, cameraAbility_); if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: CreateStream CommitStreams error\n"); std::vector<int> streamIds; streamIds.push_back(streamId); streamOperator_->ReleaseStreams(streamIds); return RC_ERROR; } CAMERA_LOGD("demo test: CreateStream exit"); return RC_OK; }CaptureON()接口调用streamOperator的Capture()方法获取Camera数据并轮转buffer,拉起一个线程接收相应类型的数据。
RetCode OhosCameraDemo::CaptureON(const int streamId, const int captureId, CaptureMode mode) { CAMERA_LOGI("demo test: CaptureON enter streamId == %{public}d and captureId == %{public}d and mode == %{public}d", streamId, captureId, mode); std::lock_guard<std::mutex> l(metaDatalock_); if (mode == CAPTURE_SNAPSHOT) { constexpr double latitude = 27.987500; // dummy data: Qomolangma latitde constexpr double longitude = 86.927500; // dummy data: Qomolangma longituude constexpr double altitude = 8848.86; // dummy data: Qomolangma altitude constexpr size_t entryCapacity = 100; constexpr size_t dataCapacity = 2000; captureSetting_ = std::make_shared<CameraSetting>(entryCapacity, dataCapacity); captureQuality_ = OHOS_CAMERA_JPEG_LEVEL_HIGH; captureOrientation_ = OHOS_CAMERA_JPEG_ROTATION_270; mirrorSwitch_ = OHOS_CAMERA_MIRROR_ON; gps_.push_back(latitude); gps_.push_back(longitude); gps_.push_back(altitude); captureSetting_->addEntry(OHOS_JPEG_QUALITY, static_cast<void*>(&captureQuality_), sizeof(captureQuality_)); captureSetting_->addEntry(OHOS_JPEG_ORIENTATION, static_cast<void*>(&captureOrientation_), sizeof(captureOrientation_)); captureSetting_->addEntry(OHOS_CONTROL_CAPTURE_MIRROR, static_cast<void*>(&mirrorSwitch_), sizeof(mirrorSwitch_)); captureSetting_->addEntry(OHOS_JPEG_GPS_COORDINATES, gps_.data(), gps_.size()); } std::vector<uint8_t> setting; MetadataUtils::ConvertMetadataToVec(captureSetting_, setting); captureInfo_.streamIds_ = {streamId}; if (mode == CAPTURE_SNAPSHOT) { captureInfo_.captureSetting_ = setting; } else { captureInfo_.captureSetting_ = cameraAbility_; } captureInfo_.enableShutterCallback_ = false; int rc = streamOperator_->Capture(captureId, captureInfo_, true); // 实际capture开始,buffer轮转开始 if (rc != HDI::Camera::V1_0::NO_ERROR) { CAMERA_LOGE("demo test: CaptureStart Capture error\n"); streamOperator_->ReleaseStreams(captureInfo_.streamIds_); return RC_ERROR; } if (mode == CAPTURE_PREVIEW) { streamCustomerPreview_->ReceiveFrameOn(nullptr); // 创建预览线程接收传递上来的buffer } else if (mode == CAPTURE_SNAPSHOT) { streamCustomerCapture_->ReceiveFrameOn([this](void* addr, const uint32_t size) { // 创建capture线程通过StoreImage回调接收传递上来的buffer StoreImage(addr, size); }); } else if (mode == CAPTURE_VIDEO) { OpenVideoFile(); streamCustomerVideo_->ReceiveFrameOn([this](void* addr, const uint32_t size) { // 创建video线程通过StoreImage回调接收传递上来的buffer StoreVideo(addr, size); }); } CAMERA_LOGD("demo test: CaptureON exit"); return RC_OK; } -
ManuList()函数从控制台通过fgets()接口获取字符,不同字符所对应demo支持的功能不同,并打印出该demo所支持功能的菜单。
static void ManuList(const std::shared_ptr<OhosCameraDemo>& mainDemo, const int argc, char** argv) { int idx, c; bool isAwb = true; const char *shortOptions = "h:cwvaeqof:"; c = getopt_long(argc, argv, shortOptions, LONG_OPTIONS, &idx); while (1) { switch (c) { case 'h': c = PutMenuAndGetChr(); // 打印菜单 break; case 'f': FlashLightTest(mainDemo); // 手电筒功能测试 c = PutMenuAndGetChr(); break; case 'o': OfflineTest(mainDemo); // Offline功能测试 c = PutMenuAndGetChr(); break; case 'c': CaptureTest(mainDemo); // Capture功能测试 c = PutMenuAndGetChr(); break; case 'w': // AWB功能测试 if (isAwb) { mainDemo->SetAwbMode(OHOS_CAMERA_AWB_MODE_INCANDESCENT); } else { mainDemo->SetAwbMode(OHOS_CAMERA_AWB_MODE_OFF); } isAwb = !isAwb; c = PutMenuAndGetChr(); break; case 'a': // AE功能测试 mainDemo->SetAeExpo(); c = PutMenuAndGetChr(); break; case 'e': // Metadata测试 mainDemo->SetMetadata(); c = PutMenuAndGetChr(); break; case 'v': // VIDEO功能测试 VideoTest(mainDemo); c = PutMenuAndGetChr(); break; case 'q': // 退出demo PreviewOff(mainDemo); mainDemo->QuitDemo(); return; default: CAMERA_LOGE("main test: command error please retry input command"); c = PutMenuAndGetChr(); break; } } }PutMenuAndGetChr()接口打印了demo程序的菜单,并调用fgets()等待从控制台输入命令,内容如下:
static int PutMenuAndGetChr(void) { constexpr uint32_t inputCount = 50; int c = 0; char strs[inputCount]; Usage(stdout); CAMERA_LOGD("pls input command(input -q exit this app)\n"); fgets(strs, inputCount, stdin); for (int i = 0; i < inputCount; i++) { if (strs[i] != '-') { c = strs[i]; break; } } return c; }控制台输出菜单详情如下:
"Options:\n" "-h | --help Print this message\n" "-o | --offline stream offline test\n" "-c | --capture capture one picture\n" "-w | --set WB Set white balance Cloudy\n" "-v | --video capture Video of 10s\n" "-a | --Set AE Set Auto exposure\n" "-e | --Set Metadeta Set Metadata\n" "-f | --Set Flashlight Set flashlight ON 5s OFF\n" "-q | --quit stop preview and quit this app\n"); -
编译用例
在drivers/peripheral/camera/BUILD.gn文件中的deps中添加“init:ohos_camera_demo”,示例代码如下:deps = [ "vdi_base/common/buffer_manager:camera_buffer_manager", "vdi_base/common/device_manager:camera_device_manager", "vdi_base/common/hdi_impl:camera_host_service_1.0", "vdi_base/common/pipeline_core:camera_pipeline_core", "vdi_base/common/utils:camera_utils", "test/common:ohos_camera_demo", ]以RK3568为例:
- 执行全量编译命令./build.sh --product-name rk3568 --ccache,生成可执行二进制文件ohos_camera_demo,路径为:out/rk3568/packages/phone/vendor/bin/。
- 将可执行文件ohos_camera_demo导入开发板,修改权限直接运行即可。
参考
HCS配置文件说明
针对Camera模块0penHarmony提供了默认的HCS配置。开发者若有特殊需求可自行修改相关的HCS配置文件。Camera模块HCS配置文件路径:/vendor/hihope/rk3568/hdf_config/uhdf/camera,其中:
-
./hdi_impl/camera_host_config.hcs相机静态能力:包括镜头位置、镜头类型、连接类型、支持的曝光模式等,需要根据产品的具体规格来配置 -
./pipeline_core/config.hcs主要是pipeline的连接方式,pipeline配置中包含支持的pipeline类型,每一种pipeline中包含的节点以及节点之间的连接关系编译后在
/drivers/periphera/camra/vdi_base/common/pipeline_core/pipeline_impl/src/strategy/config目录下生产congfig.c和congfig.h文件 -
./pipeline_core/ipp_algo_config.hcs算法配置文件 -
./pipeline_core/params.hcs场景、流类型名及其id定义,pipeline内部是以流id区分流类型的,所以此处需要添加定义编译后在
/drivers/periphera/camra/vdi_base/common/pipeline_core/pipeline_impl/src/strategy/config目录下生产params.c和params.h文件
Camera Dump使用指导
功能简介
Camera Dump功能为Camera相关功能的开发提供测试保障,根据需要配置开关文件即可开启此功能。
- 在流程的不同阶段提供buffer Dump功能,可帮助开发者快速定位图像问题点和数据,清晰直观地判断图像数据在哪个处理节点中出现问题。
- 对metadata的Dump可以判断metadata参数设置是否正确,还能确定不同参数对图像画质的影响。
源码目录说明
/drivers/peripheral/camera/vdi_base/common/dump
├── include
│ └── camera_dump.h #Dump头文件
└── src
└── camera_dump.cpp #Dump核心源码Dump配置文件说明
Dump配置文件为dump.config,存放在开发设备 /data/local/tmp 目录中。
表1 Dump开关说明
| 开关 | 取值 | 描述 | 适用场景 | 输出数据格式 |
|---|---|---|---|---|
| enableDQBufDump | true/false | 开启开关,可以Dump v4l2_buffer.cpp文件中DequeueBuffer函数中的数据 | 预览、拍照、录像 | 板载相机:YUV420 USB相机:YUV422 |
| enableUVCNodeBufferDump | true/false | 开启开关,可以Dump uvc_node.cpp文件中YUV422To420函数转换前的数据 | 预览、拍照、录像 | USB相机:YUV422 |
| enableUVCNodeConvertedBufferDump | true/false | 开启开关,可以Dump uvc_node.cpp文件中YUV422To420函数转换后的数据 | 预览、拍照、录像 | USB相机:YUV420 |
| enableExifNodeConvertedBufferDump | true/false | 开启开关,可以Dump exif_node.cpp文件中DeliverBuffer函数中的数据 | 拍照 | JPEG |
| enableFaceNodeConvertedBufferDump | true/false | 开启开关,可以Dump face_node.cpp文件中DeliverBuffer函数中的数据 | 无(预留给后期使用) | 无 |
| enableForkNodeConvertedBufferDump | true/false | 开启开关,可以Dump fork_node.cpp文件中DeliverBuffer函数中的数据 | 预览、拍照、录像 | YUV422 |
| enableRKFaceNodeConvertedBufferDump | true/false | 开启开关,可以Dump rk_face_node.cpp文件中DeliverBuffer函数中的数据 | 无(预留给后期使用) | 无 |
| enableRKExifNodeConvertedBufferDump | true/false | 开启开关,可以Dump rk_exif_node.cpp文件中DeliverBuffer函数中的数据 | 拍照 | JPEG |
| enableCodecNodeConvertedBufferDump | true/false | 开启开关,可以Dump codec_node.cpp文件中DeliverBuffer函数中的数据 | 预览、拍照、录像 | JPEG、YUV420、RGBA8888 |
| enableRKCodecNodeConvertedBufferDump | true/false | 开启开关,可以Dump rk_codec_node.cpp文件中DeliverBuffer函数中的数据 | 预览、拍照、录像 | JPEG、H264、RGBA8888 |
| enableSreamTunnelBufferDump | true/false | 开启开关,可以Dump stream_tunnel.cpp文件中PutBuffer函数中的数据 | 预览、拍照、录像 | JPEG、H264、YUV420、RGBA8888 |
| enableMetadataDump | true/false | 开启Dump metadata 数据开关 | 预览、拍照、录像 | .meta |
除了上述开关,还可以配置Dump的采样间隔,如表2所示。
表2 Dump采样间隔
| Dump采样间隔 | 取值 | 描述 |
|---|---|---|
| previewInterval | int(大于等于1) | Dump预览间隔,默认1,每帧都Dump |
| videoInterval | int(大于等于1) | Dump录像间隔,默认1,每帧都Dump |
配置示例
在本地计算机任意位置新建一个文件,命名为dump.config,根据以上开关,将要Dump的位置对应的开关写入文件中,值指定为true。
完整配置:
enableDQBufDump=true
enableUVCNodeBufferDump=false
enableUVCNodeConvertedBufferDump=false
enableExifNodeConvertedBufferDump=false
enableFaceNodeConvertedBufferDump=false
enableForkNodeConvertedBufferDump=false
enableRKFaceNodeConvertedBufferDump=false
enableRKExifNodeConvertedBufferDump=false
enableCodecNodeConvertedBufferDump=false
enableRKCodecNodeConvertedBufferDump=false
enableSreamTunnelBufferDump=false
enableMetadataDump=true
previewInterval=3
videoInterval=1
配置示例:
例如,要Dump DequeueBuffer和metadata的数据,并且将Dump采样间隔设置为3,可以按上面加粗的配置修改。
开启Dump功能
-
将配置文件发送到开发设备的目录 /data/local/tmp 中。
hdc file send dump.config /data/local/tmp -
修改Dump目录权限。
hdc shell mount -o rw,remount /data hdc shell chmod 777 /data/ -R -
打开Dump。
hdc shell "hidumper -s 5100 -a '-host camera_host -o'"- -s 5100 获取id为5100的元能力的全部信息,这里指Camera。
- -a '-host camera_host -o'" 导出指定的系统元能力信息。
- 详细的hidumper说明,请参考HiDumper使用指导。
-
打开相机,进行预览、拍照和录像等操作。
Dump结果
打开Dump后,会在设备的 /data/local/tmp 目录中生成Dump调测数据文件,将数据文件发送到本地电脑中后即可查看。
hdc file recv /data/local/tmp/xxxx.yuv ~/最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
-
HarmonOS基础技能
- HarmonOS就业必备技能
- HarmonOS多媒体技术
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

- 初识HarmonOS内核
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
《鸿蒙生态应用开发V2.0白皮书》
《鸿蒙 (OpenHarmony)开发基础到实战手册》
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。















 645
645











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









