






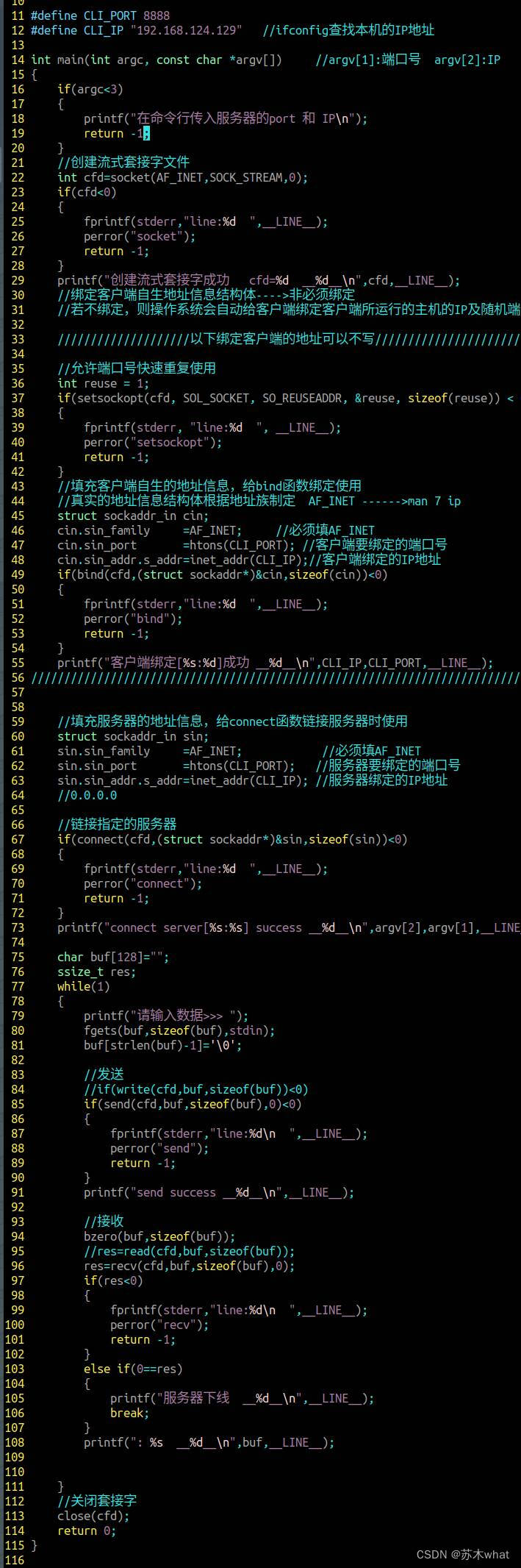
TCP

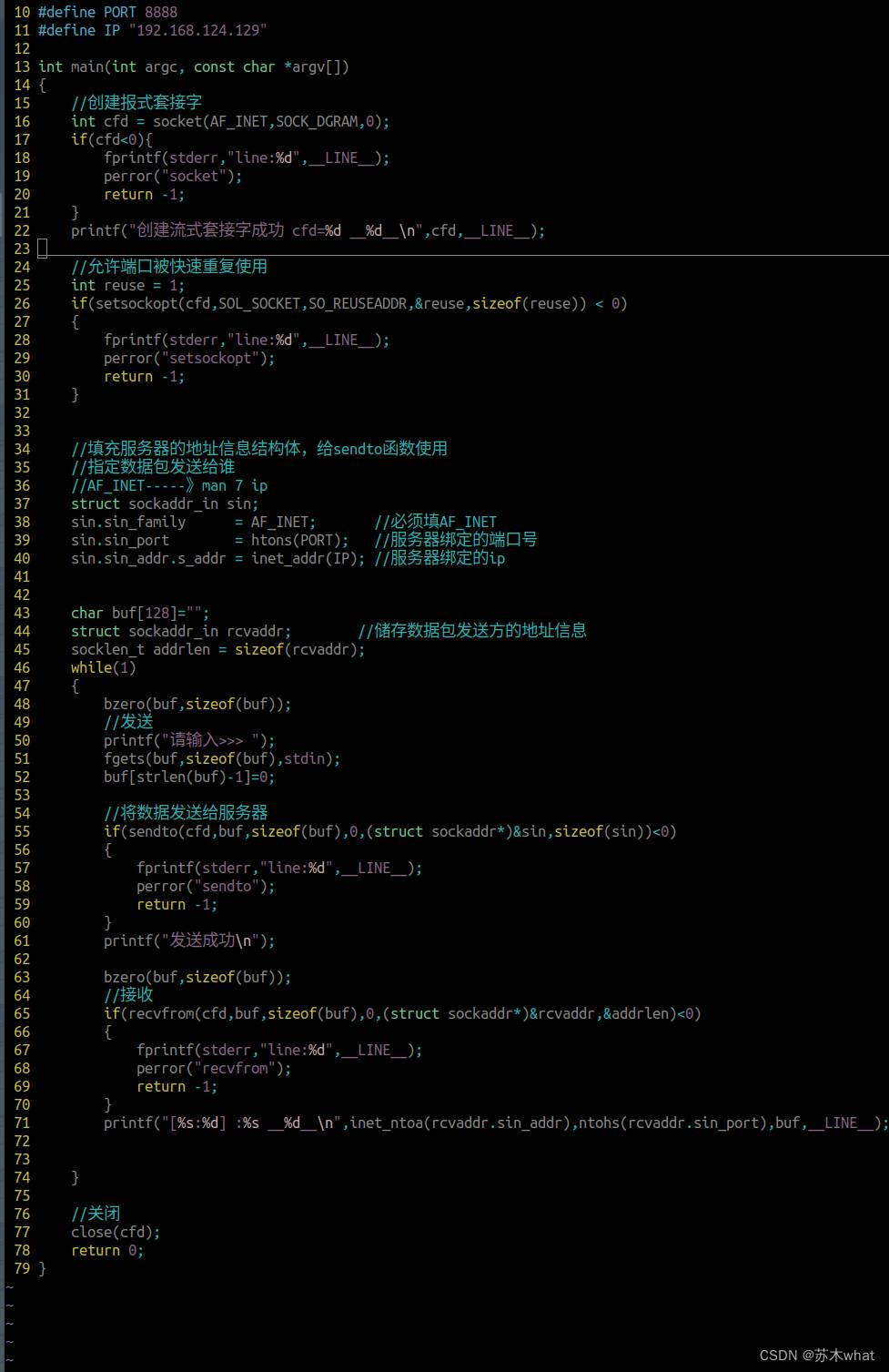
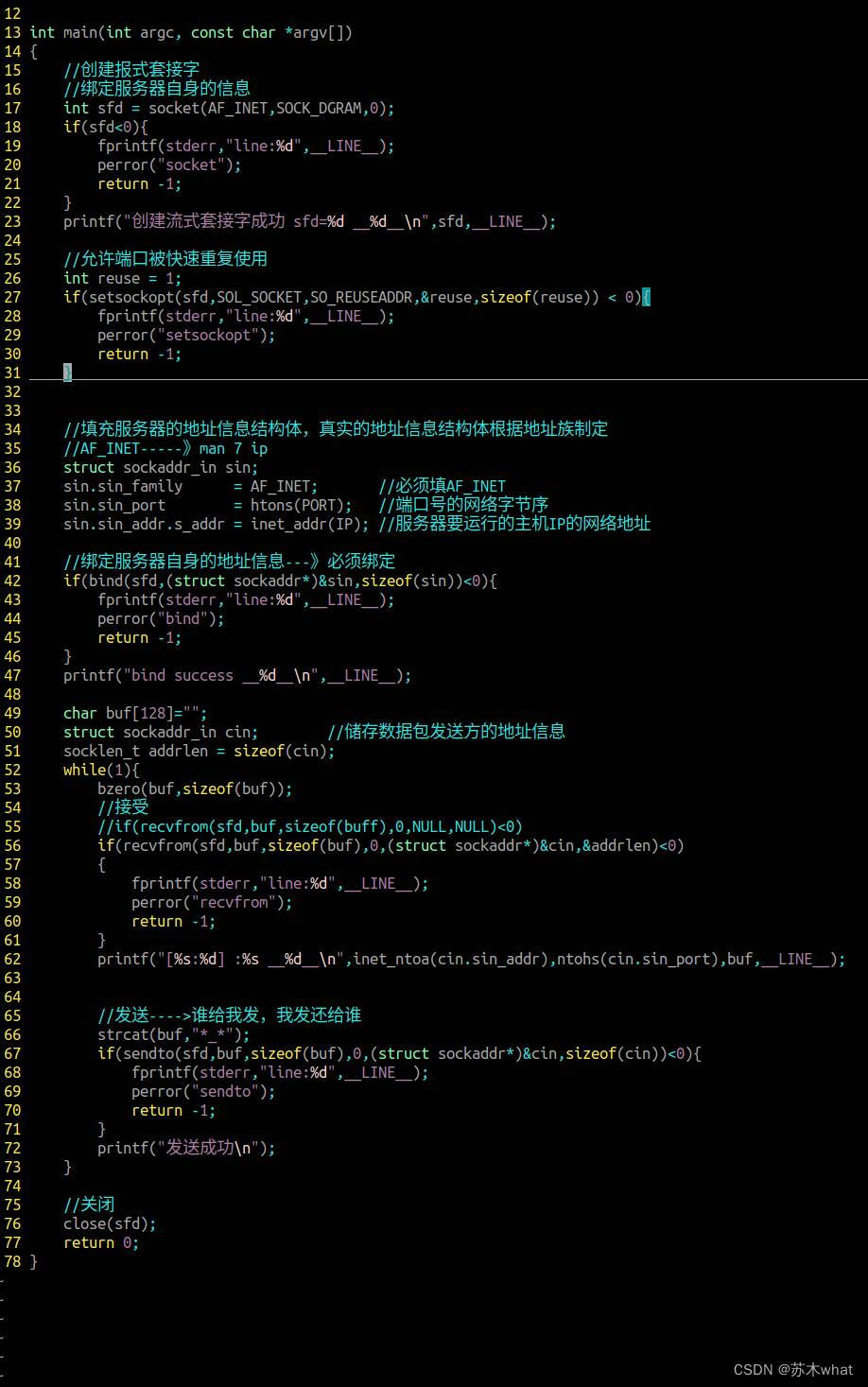
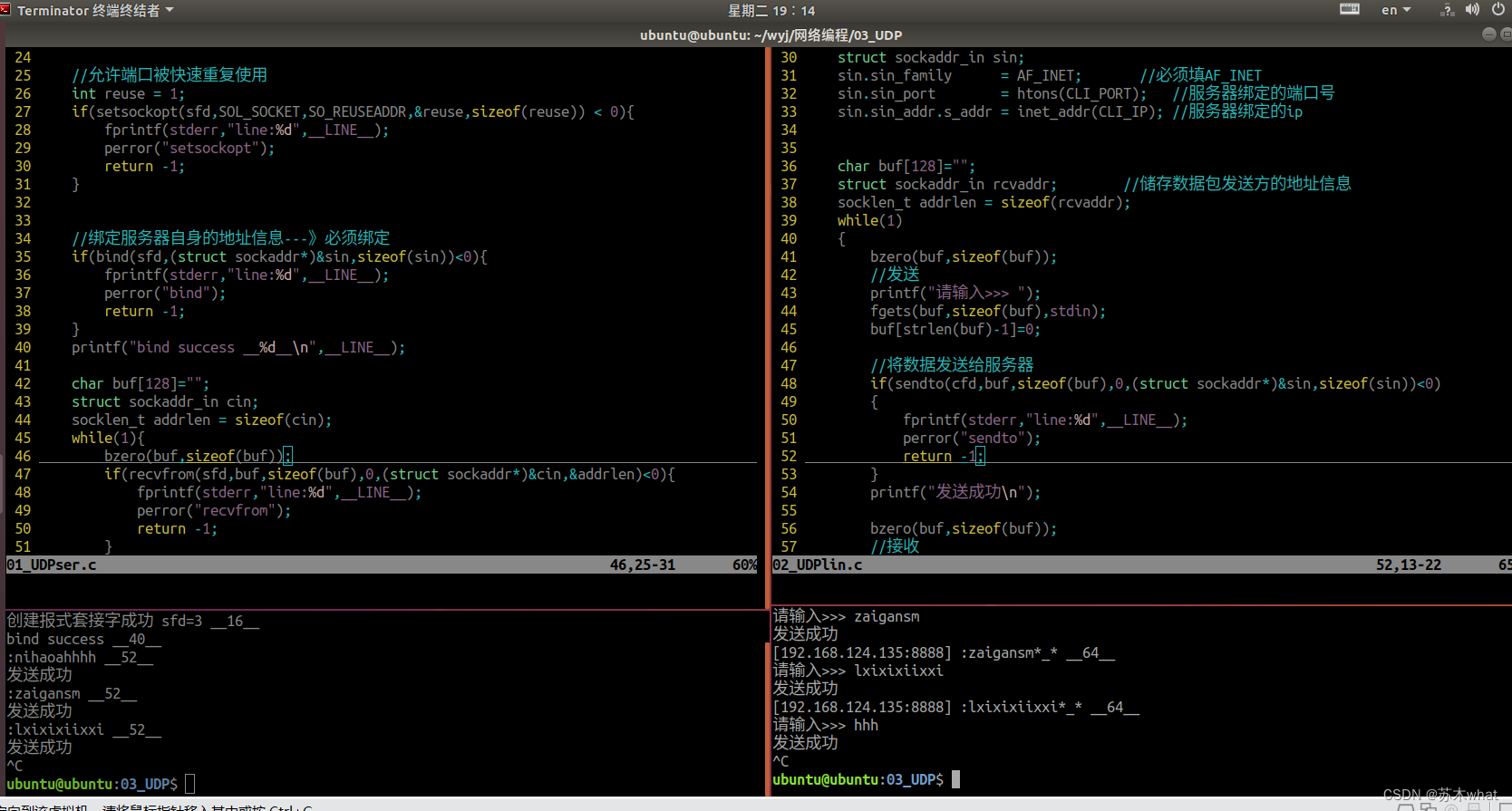
DUP
机械臂小项目
机械臂实现代码:
#include <head.h>
#include <linux/input.h>
#define CLI_PORT 6666
#define CLI_IP "192.168.124.135"
int main(int argc, const char *argv[])//argv[1]:端口号,argv[2]:IP
{
if(argc<3){
printf("请在命令行传入服务器的port和IP\n");
return -1;
}
//创建流式套接字
int cfd = socket(AF_INET,SOCK_STREAM,0);
if(cfd<0){
fprintf(stderr,"line:%d ",__LINE__);
perror("socket");
return -1;
}
printf("create socket success,cfd=%d __%d__\n",cfd,__LINE__);
//允许端口号被快速重复使用
int reuse = 1;
if(setsockopt(cfd, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse)) < 0)
{
fprintf(stderr, "line:%d ", __LINE__);
perror("setsockopt");
return -1;
}
struct sockaddr_in sin;
sin.sin_family =AF_INET;
sin.sin_port =htons(atoi(argv[1]));
sin.sin_addr.s_addr = inet_addr(argv[2]);
if(connect(cfd,(struct sockaddr*)&sin,sizeof(sin))<0){
fprintf(stderr,"line:%d ",__LINE__);
perror("connect");
return -1;
}
printf("connect server[%s:%s]success __%d__\n",argv[2],argv[1],__LINE__);
//打开键盘驱动文件:/dev/input/event1
int fd = open("/dev/input/event1",O_RDONLY);
if(fd<0){
perror("open");
return -1;
}
struct input_event ev;
/* while(1){
if(read(fd,&ev,sizeof(ev))<0){
perror("read");
return -1;
}
printf("type:%-4u code:%-4u value:%-4u\n",ev.type,ev.code,ev.value);
}*/
char buf[5]={0xff,0x02,0x00,0xA6,0xff};
if(send(cfd,buf,sizeof(buf),0)<0){ //最后一个参数为0,此时send等价于write
fprintf(stderr,"line:%d ",__LINE__);
perror("send");
return -1;
}
printf("send success __%d__\n",__LINE__);
sleep(1);
unsigned char str[5]={0xff,0x02,0x01,0x00,0xff};
if(send(cfd,str,sizeof(str),0)<0){ //最后一个参数为0,此时send等价于write
fprintf(stderr,"line:%d ",__LINE__);
perror("send");
return -1;
}
printf("send success __%d__\n",__LINE__);
char c;
while(1){
if(read(fd,&ev,sizeof(ev))<0){
perror("read");
return -1;
while(getchar() != '\n');
}
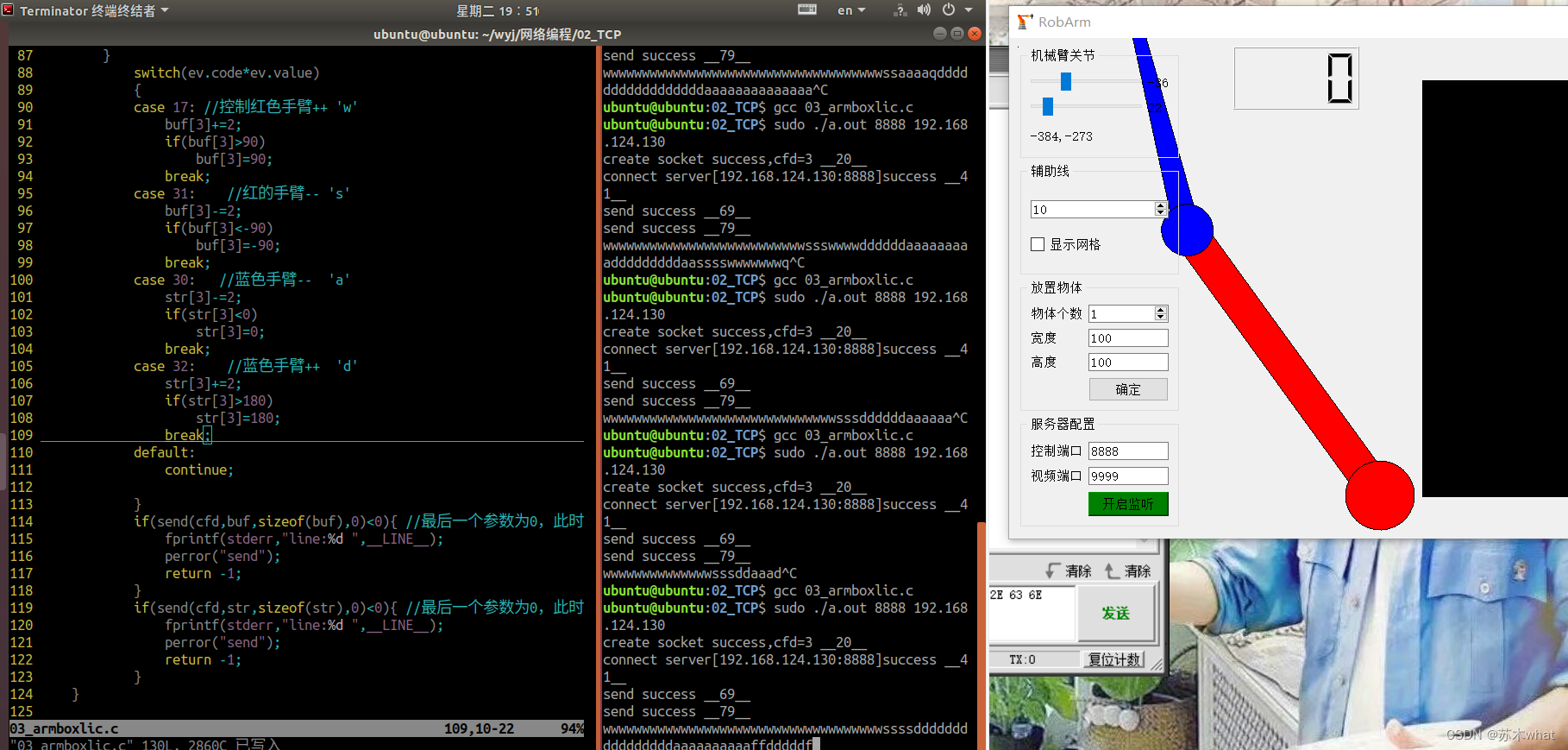
switch(ev.code*ev.value)
{
case 17: //控制红色手臂++ 'w'
buf[3]+=2;
if(buf[3]>90)
buf[3]=90;
break;
case 31: //红的手臂-- 's'
buf[3]-=2;
if(buf[3]<-90)
buf[3]=-90;
break;
case 30: //蓝色手臂-- 'a'
str[3]-=2;
if(str[3]<0)
str[3]=0;
break;
case 32: //蓝色手臂++ 'd'
str[3]+=2;
if(str[3]>180)
str[3]=180;
break;
default:
continue;
}
if(send(cfd,buf,sizeof(buf),0)<0){ //最后一个参数为0,此时send等价于write
fprintf(stderr,"line:%d ",__LINE__);
perror("send");
return -1;
}
if(send(cfd,str,sizeof(str),0)<0){ //最后一个参数为0,此时send等价于write
fprintf(stderr,"line:%d ",__LINE__);
perror("send");
return -1;
}
}
//关闭套接字
close(cfd);
return 0;
}















 334
334











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









