







冒泡排序
基本思想:
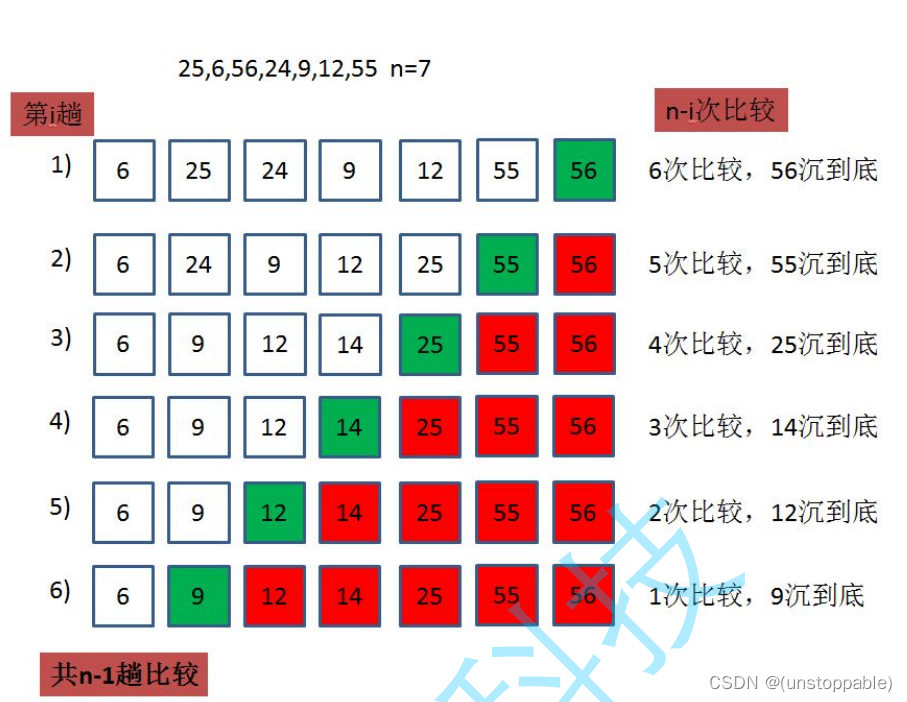
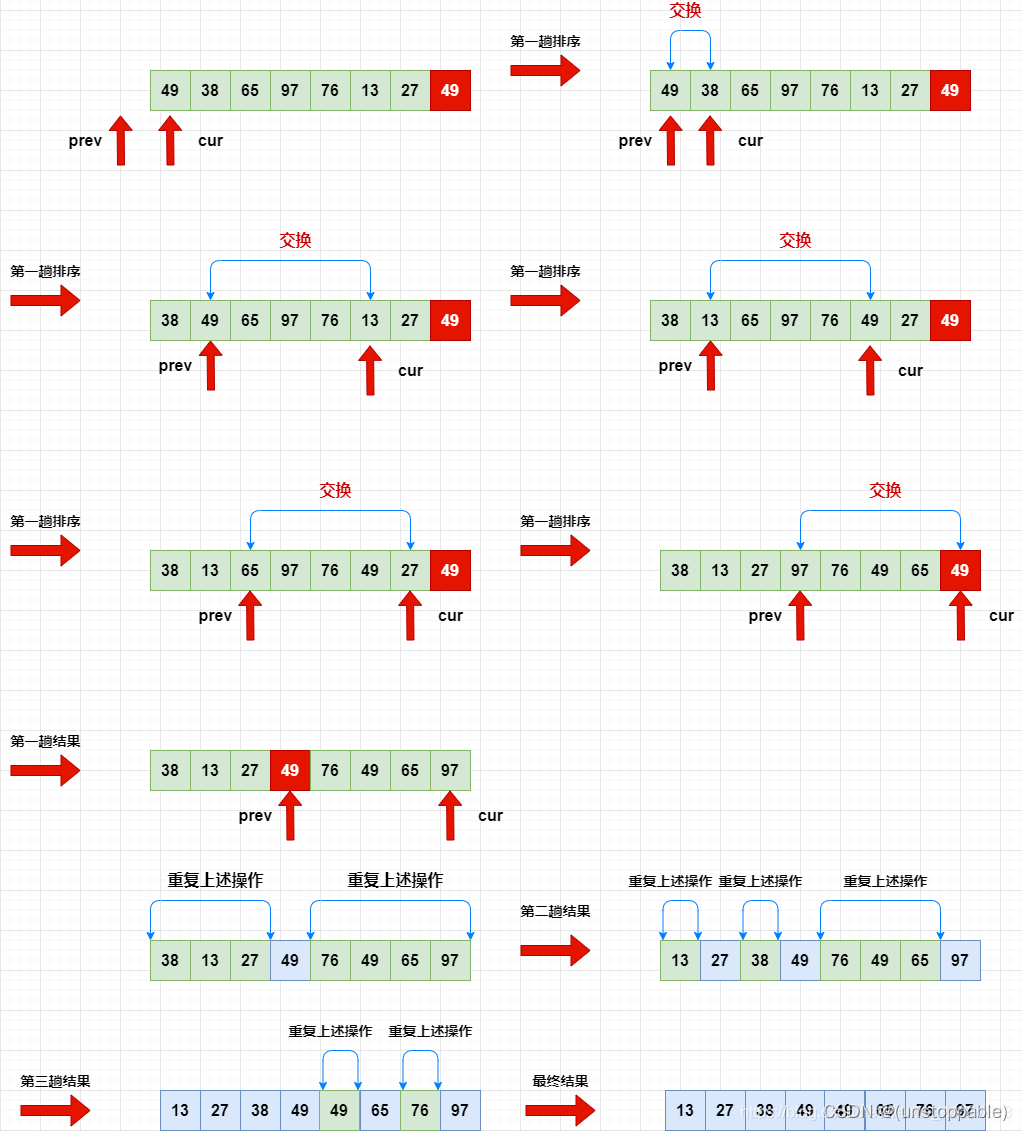
冒泡排序每一趟都把整个数组两两进行比较(已经有确定位置的数不再比较),如果前一个比后一个大则交换,否则不变。每比较一趟就确定一个数的正确位置,一共比较n-1趟。
冒泡排序的特性总结:
- 冒泡排序是一种非常容易理解的排序
- 时间复杂度:O(N^2)
- 空间复杂度:O(1)
- 稳定性:稳定
void BubbleSort(int* a, int n)
{
for (int j = 0; j < n; j++)
{
int flag = 1;
for (int i = 0; i < n - 1-j; i++)
{
if (a[i] > a[i + 1])
{
flag = 0;
swap(&a[i], &a[i + 1]);
}
}
if (flag == 1)
{
break;
}
}
}
快速排序
基本思想:
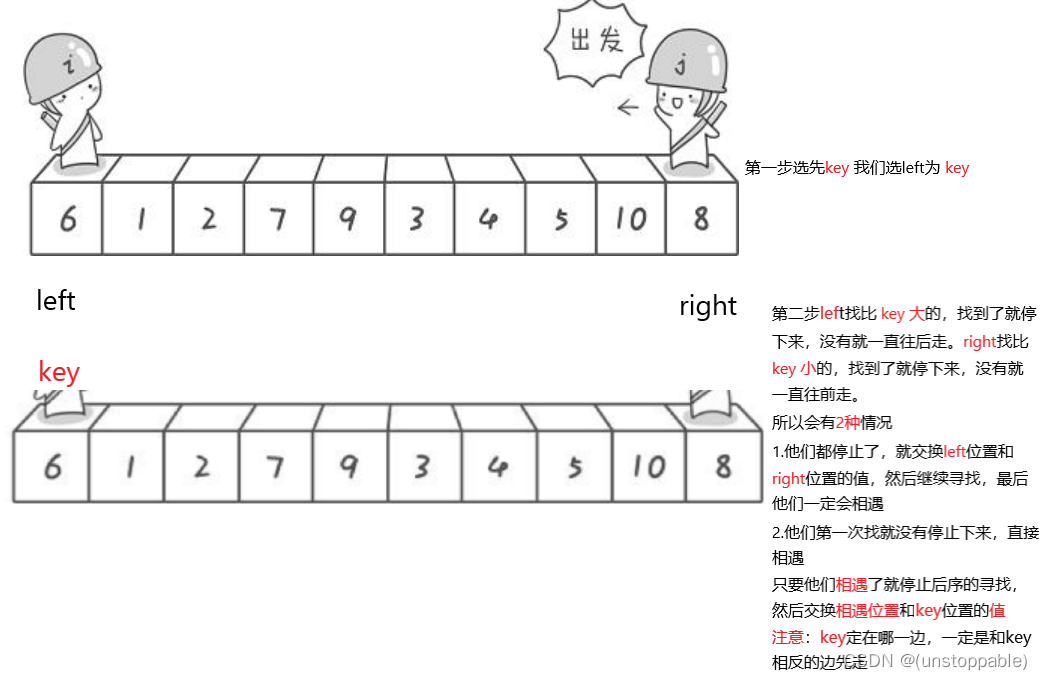
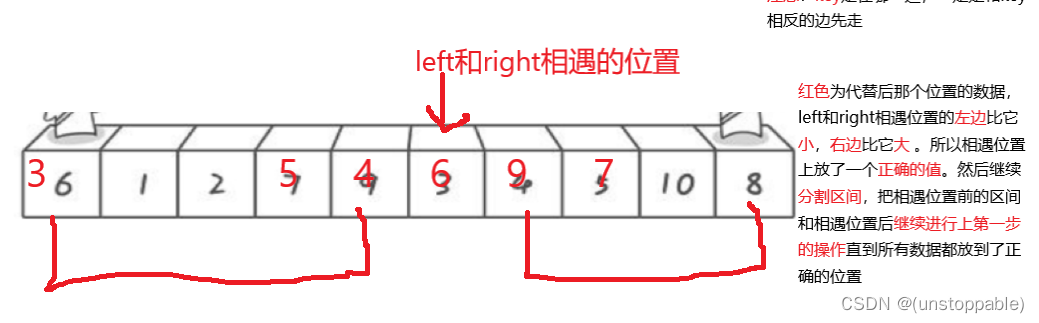
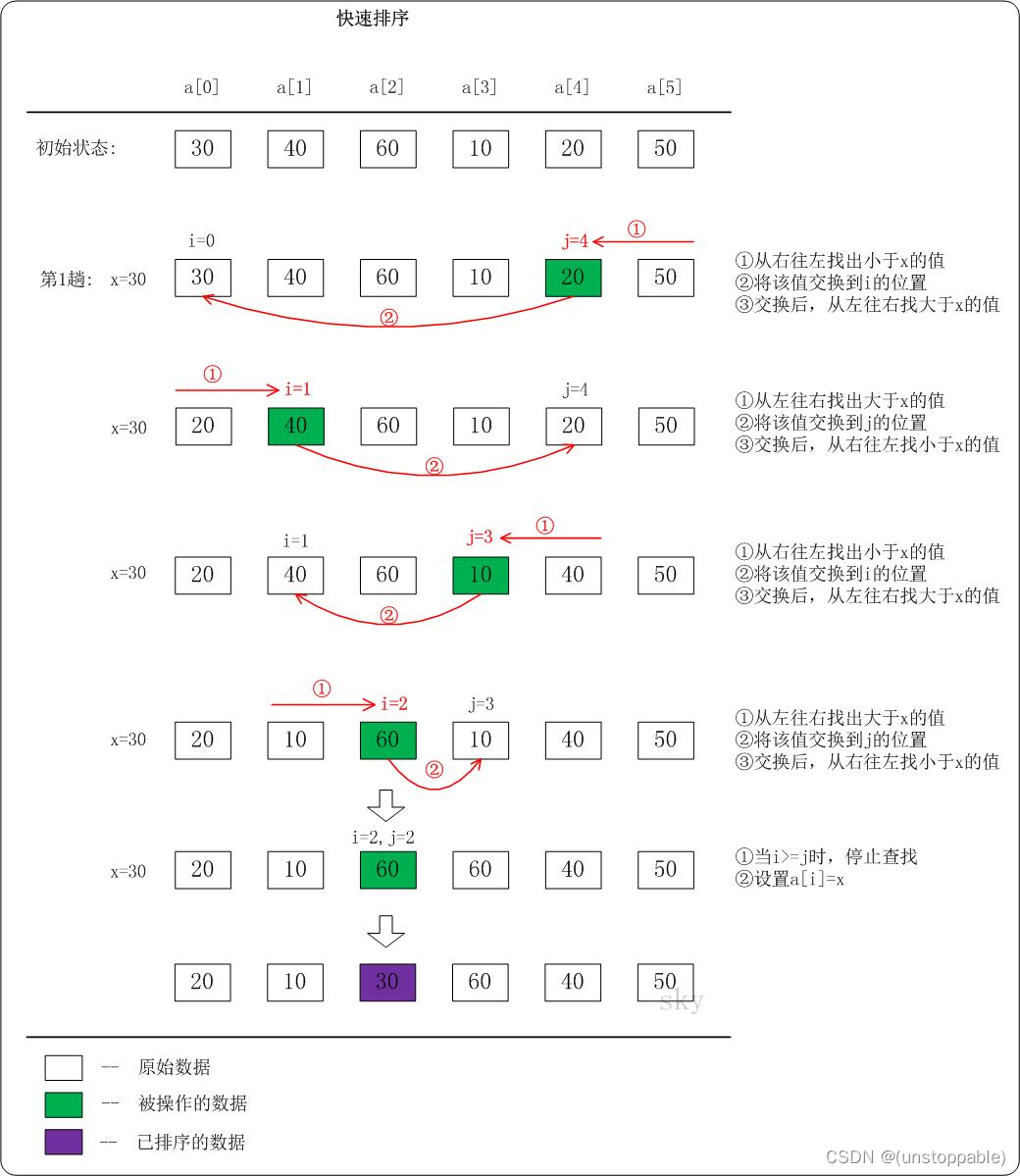
快速排序是Hoare于1962年提出的一种二叉树结构的交换排序方法,其基本思想为:任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
将区间按照基准值划分为左右两半部分的常见方式有:
- hoare版本
- 挖坑法
- 前后指针版本
hoare版本
排序过程:
int GetMidIndex(int* a,int left,int right)
{
int mid = (left + right) / 2;
if (a[mid] > a[left])
{
if (a[mid] < a[right])
{
return mid;
}
else if (a[right] < a[left])
{
return left;
}
else
{
return right;
}
}
else
{
if (a[mid] > a[right])
{
return mid;
}
else if (a[right] > a[left])
{
return left;
}
else
{
return right;
}
}
}
int partition1(int* a,int left,int right)
{
int mid = GetMidIndex(a, left, right);
swap(&a[mid], &a[left]);
int keyi = left;
while (left < right)
{
while (left<right && a[right] >= a[keyi])
{
right--;
}
while(left<right && a[left] <= a[keyi])
{
left++;
}
swap(&a[left], &a[right]);
}
swap(&a[left], &a[keyi]);
return left;
}
void QuickSort(int* a, int left,int right)
{
if (left >= right)
{
return;
}
int mid = partition1(a,left,right);
QuickSort(a, left , mid - 1);
QuickSort(a, mid+1, right);
}
挖坑版
挖坑法和第一个方法差不过,但是更好理解,他是先把key的值保存,然后把key的位置做坑,之后每次改变坑位直到循环结束再把保存的值放在最后的坑位上。
排序过程
int GetMidIndex(int* a,int left,int right)
{
int mid = (left + right) / 2;
if (a[mid] > a[left])
{
if (a[mid] < a[right])
{
return mid;
}
else if (a[right] < a[left])
{
return left;
}
else
{
return right;
}
}
else
{
if (a[mid] > a[right])
{
return mid;
}
else if (a[right] > a[left])
{
return left;
}
else
{
return right;
}
}
}
int partition2(int* a, int left, int right)
{
int mid = GetMidIndex(a, left, right);
swap(&a[mid], &a[left]);
int pit = left;
int x = a[left];
while (left < right)
{
while (left < right && a[right] >= x)
{
right--;
}
a[pit] = a[right];
pit = right;
while (left < right && a[left] <= x)
{
left++;
}
a[pit] = a[left];
pit = left;
}
a[pit] = x;
return pit;
}
void QuickSort(int* a, int left,int right)
{
if (left >= right)
{
return;
}
int mid = partition2(a,left,right);
QuickSort(a, left , mid - 1);
QuickSort(a, mid+1, right);
}
前后指针版
前后指针法定义了两个指针,cur和prev。每一趟都cur先走找小,找到了就停下来,然后prev先++再把prev处的值和cur位置的值交换,就这样一直进行下去直到cur超出了数组的范围,这一趟就结束了。
然后再递归下去进行已经排好的数据的左边数组和右边数组的排序。
排序过程:
int GetMidIndex(int* a,int left,int right)
{
int mid = (left + right) / 2;
if (a[mid] > a[left])
{
if (a[mid] < a[right])
{
return mid;
}
else if (a[right] < a[left])
{
return left;
}
else
{
return right;
}
}
else
{
if (a[mid] > a[right])
{
return mid;
}
else if (a[right] > a[left])
{
return left;
}
else
{
return right;
}
}
}
int partition3(int* a, int left, int right)
{
int mid = GetMidIndex(a, left, right);
swap(&a[mid], &a[left]);
int cur = left + 1;
int prev = left;
int key = left;
while (cur <= right)
{
if (a[cur] < a[key] && cur != ++prev)
{
swap(&a[cur], &a[prev]);
}
cur++;
}
swap(&a[key], &a[prev]);
return prev;
}
void QuickSort(int* a, int left,int right)
{
if (left >= right)
{
return;
}
int mid = partition3(a,left,right);
QuickSort(a, left , mid - 1);
QuickSort(a, mid+1, right);
}
非递归版
非递归版的快速排序,是使用栈保存了快速排序的left和right
1.一开始先存入整个数组的left和right
2.开始进行先取出栈的数据,第一次排序
3.保存第一次排序后两个分割区的left和right(先保存右边的数组,再保存左边的数组)
4.然后再开始取出栈的数据,进行下面的排序
5.就这样一直排序下去,直到栈为空
void QuickSortNoR(int* a, int left, int right)
{
ST st;
StackInit(&st);
StackPush(&st, left);
StackPush(&st, right);
while (!StackEmpty(&st))
{
int end = StackTop(&st);
StackPop(&st);
int begin = StackTop(&st);
StackPop(&st);
int keyi = partition1(a, begin, end);
if (begin < keyi)
{
StackPush(&st, begin);
StackPush(&st, keyi-1);
}
if (keyi < end)
{
StackPush(&st, keyi+1);
StackPush(&st, end);
}
}
StackDestroy(&st);
}
这里的栈的各种操作的代码并未给出,有需要的可以翻看专栏数据结构基础,里面有分享和分析栈的各种操作实现。
快速排序的特性总结:
- 快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
- 时间复杂度:O(N*logN)
- 空间复杂度:O(logN)
- 稳定性:不稳定














 555
555











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









