







[名称]:Matlab R2021a
[语言]:简体中文
[安装环境]:Win7/Win8/Win10
[百度网盘地址]:
【超级会员V4】通过百度网盘分享的文件:MATLAB R…
链接:https://pan.baidu.com/s/19wYTr1Xz-l1ck67GTKGH-A?pwd=gm69
提取码:gm69
复制这段内容打开「百度网盘APP 即可获取」
【超级会员V4】通过百度网盘分享的文件:MATLAB P…
链接:https://pan.baidu.com/s/1mVfIu8FTcgouhDi4ywpxRw?pwd=1ez7
提取码:1ez7
复制这段内容打开「百度网盘APP 即可获取」
[阿里云下载地址]:
https://www.aliyundrive.com/s/BYPHMoAiLqq
安装
步骤
1.打开下载的【Matlab_ R2021a(64bit)】文件夹,选中【Matlab_ R2021a(64bit).part1】压缩包,鼠标右击选择【解压到Matlab_ R2021a(64bit).part1】。

2.打开解压后的【Matlab_ R2021a(64bit)】文件夹。
3.找到并选中【Matlab910R2021a_Win64.iso】安装程序,鼠标右击选择【装载】。
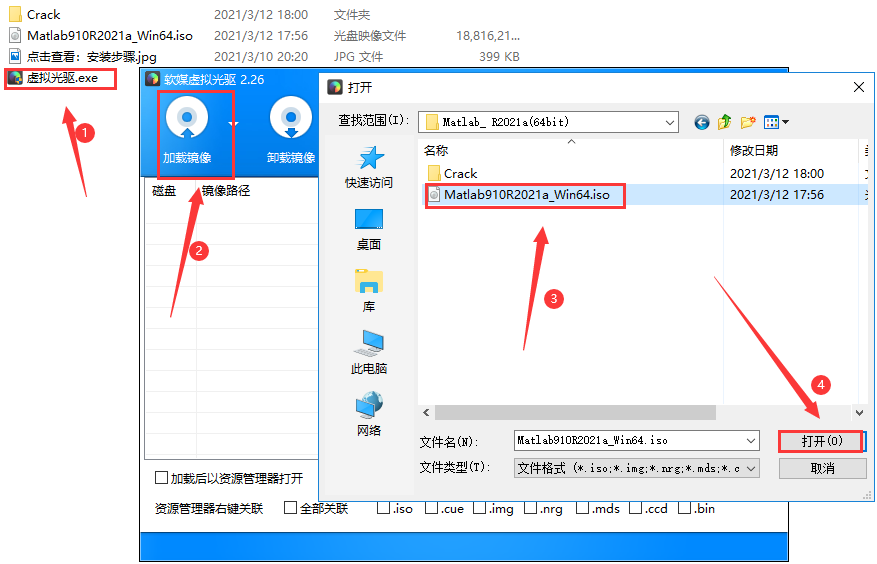
也可以打开【虚拟光驱.exe】,点击【加载镜像】,选择安装包解压后的文件夹中的【Matlab910R2021a_Win64.iso】镜像,然后点击【打开】。
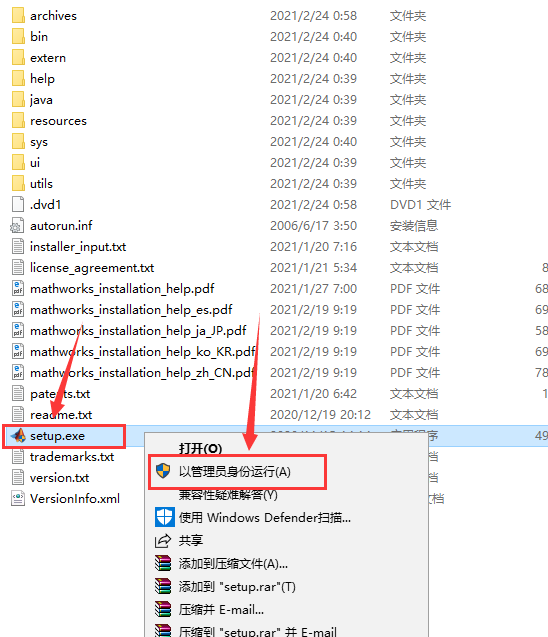
4.双击打开加载的【DVD驱动器】,找到并选中【setup.exe】安装程序,鼠标右击选择【以管理员身份运行】。
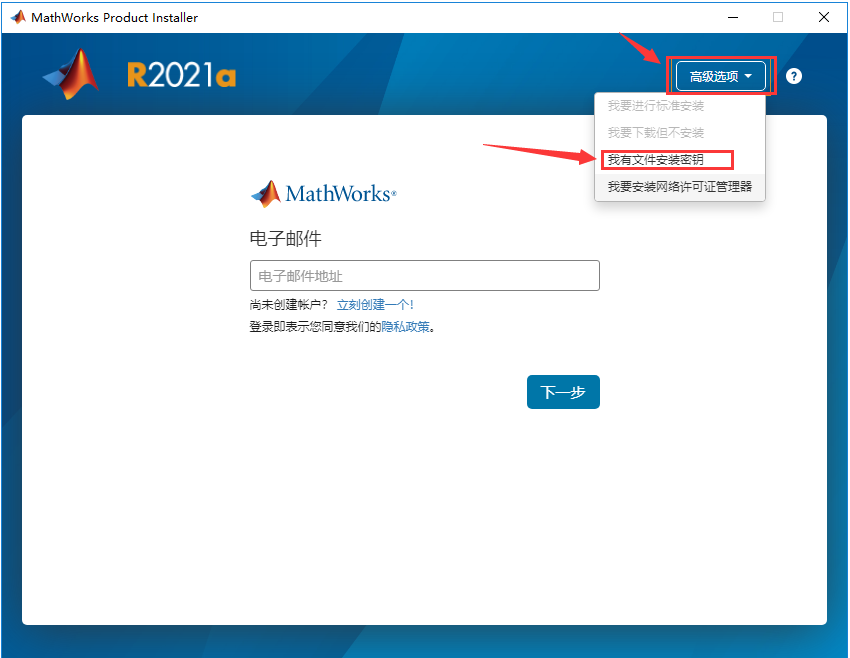
5.点击【高级选项】,选择【我有文件安装密钥】。
6.选择【是】,点击【下一步】。

7.输入文件安装密钥【09806-07443-53955-64350-21751-41297】,然后点击【下一步】。

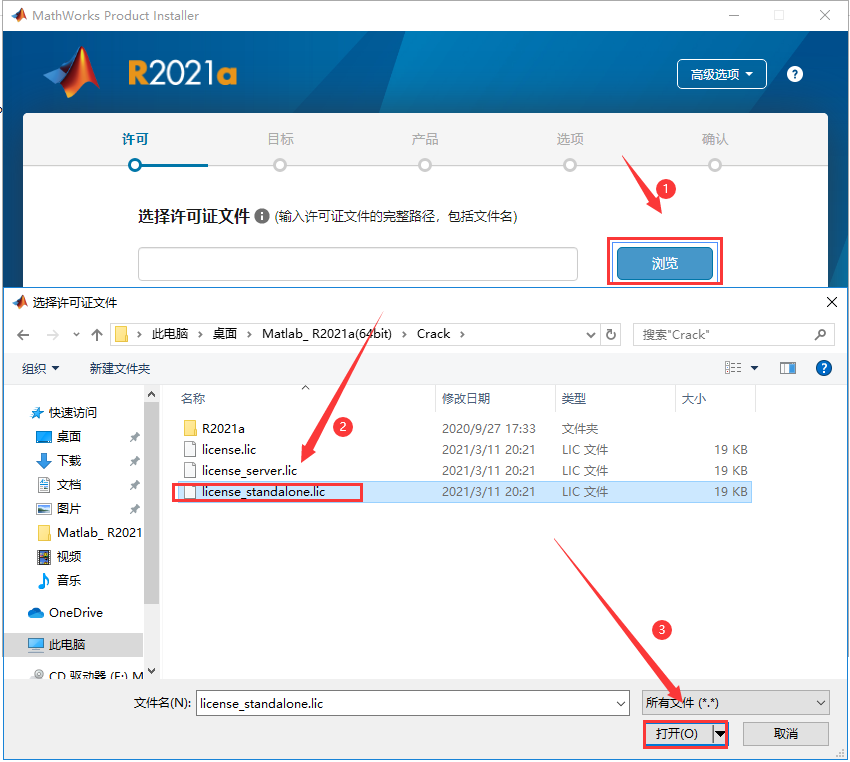
8.点击【浏览】,选择【license_standalone.lic】(位于最开始解压后的【R2020b(64bit)】文件夹中的【Crack】文件夹里面),然后点击【打开】。
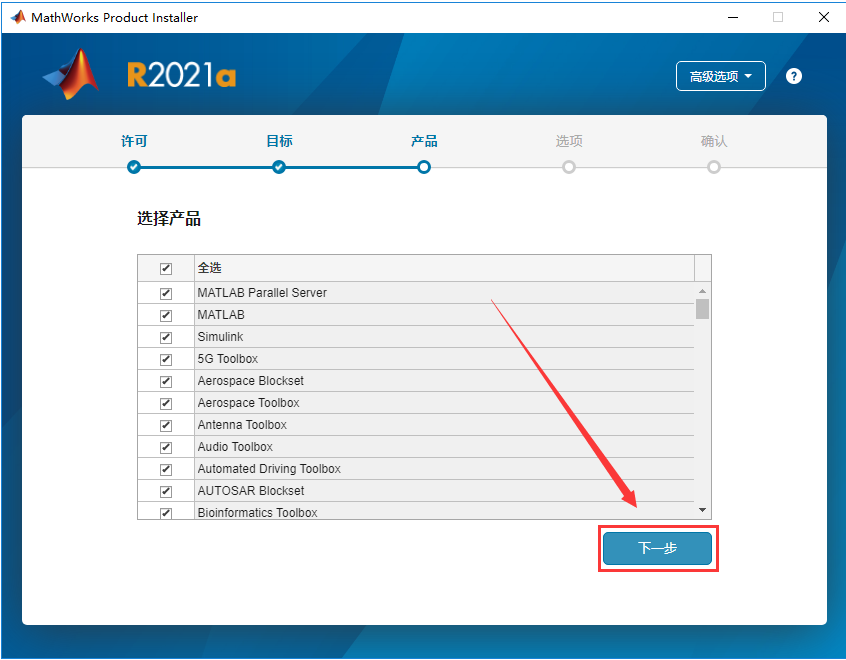
9.点击【下一步】。

10.修改路径地址中的字符【C】可更改软件安装位置(如:将C改为D表示安装在D盘,请勿修改其它字符,否则无法完成激活),然后点击【下一步】。

11.点击【下一步】。
12.勾选【将快捷方式添加到桌面】,然后点击【下一步】。

13.点击【开始安装】。

14.软件正在安装中,稍等一会儿,这个时候可以打把王者。
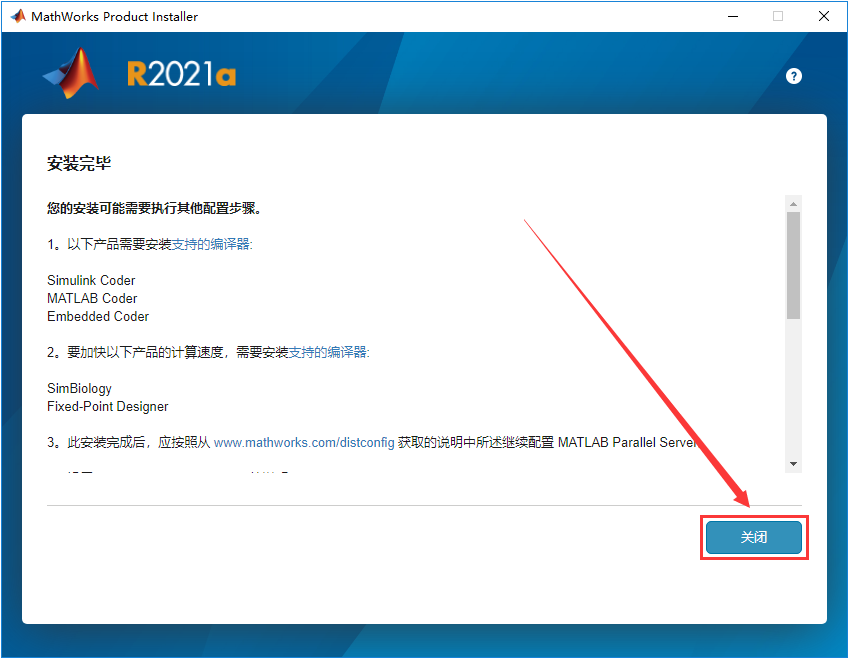
15.软件安装完成,点击【关闭】。
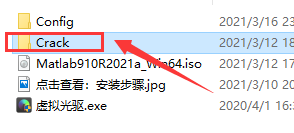
16.打开安装包解压后的【Matlab_ R2021a(64bit)】文件夹中的【Crack】文件夹。
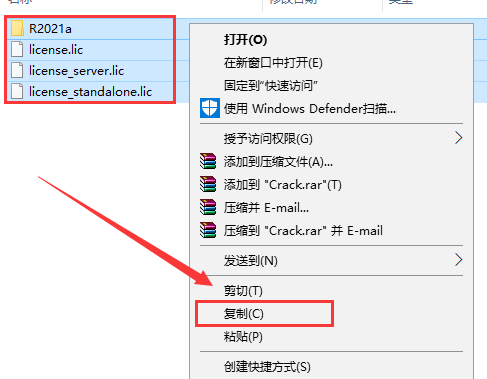
17.全选该文件夹下所有文件,鼠标右击选择【复制】。
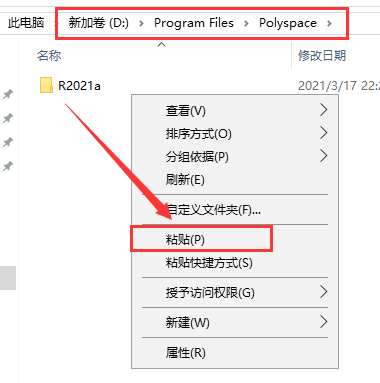
18.打开软件安装位置路径下(D:\Program Files\Polyspace,参照骤10中修改后的磁盘名称),在空白处鼠标右击选择【粘贴】。
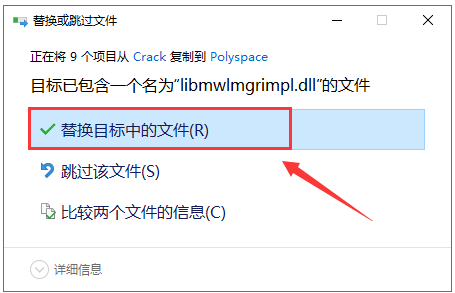
19.点击【替换目标中的文件】。
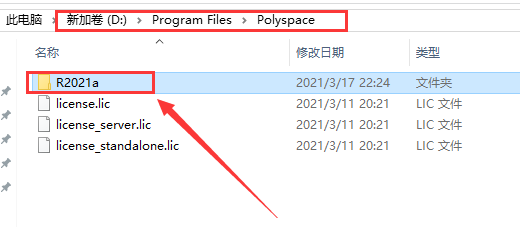
20.双击打开该文件夹下的【R2021a】文件夹。
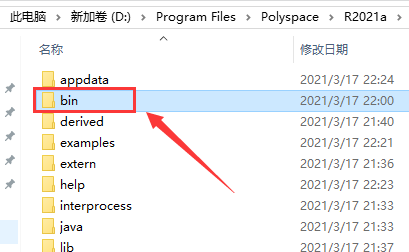
21.双击打开【bin】文件夹。
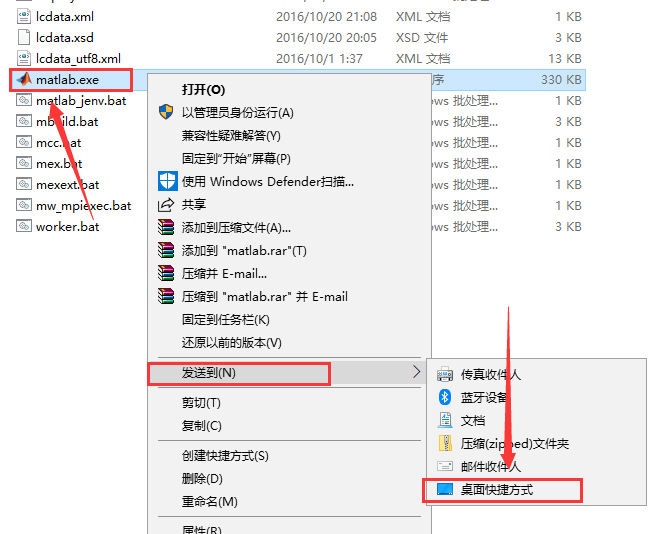
22.选中【matlab.exe】文件,鼠标右击选择【发送到】-【桌面快捷方式】
23.在桌面双击打开【matlab.exe - 快捷方式】软件图标启动软,恭喜你软件安装成功。
参考:Matlab R2021a安装教程
————————————————
原文链接:https://blog.csdn.net/GGY1102/article/details/121733746

















 1312
1312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









