




题目
LUD-YOLO: A novel lightweight object detection network for unmanned aerial vehicle
ABSTRACT:
Autonomous execution of tasks by unmanned aerial vehicles (UAVs) relies heavily on object detection. However, object detection in most images presents challenges such as complex back-grounds, small targets, and obstructions. Additionally, the limited computing speed and memory of the UAV processor affects the accuracy of conventional object detection algorithms. This paper proposes LUD-You Only Look Once (YOLO), a small and lightweight object detection algorithm for UAVs based on YOLOv8. The proposed algorithm introduces a new multiscale feature fusion mode that solves the degradation in feature propagation and interaction through the introduction of upsampling in the feature pyramid network and the progressive feature pyramid network. The application of the dynamic sparse attention mechanism in the Cf2 module achieves flexible computing allocation and content awareness. Furthermore, the proposed model is optimized to be sparse and lightweight, making it possible to deploy on UAV edge devices. Finally, the effec-tiveness and superiority of LUD-YOLO were verified on the VisDrone2019 and UAVDT datasets. The results of ablation and comparison experiments show that compared with the original al-gorithm, LUDY-N and LUDY-S have shown excellent performance in various evaluation indexes, indicating that the proposed improvement strategies make the model have better robustness and generalization. Moreover, compared with multiple other popular competitors, the proposed improvement strategies enable LUD-YOLO to have the best overall performance, providing an effective solution for UAVs object detection while balancing model size and detection accuracy.
摘要:无人机(uav)任务的自主执行在很大程度上依赖于目标检测。然而,大多数图像中的目标检测带来了复杂的背景、小目标和障碍物等挑战。此外,无人机处理器有限的计算速度和内存会影响传统目标检测算法的准确性。本文提出了一种基于YOLOv8的无人机小目标检测算法LUD-You Only Look Once (YOLO)。该算法引入了一种新的多尺度特征融合模式,通过在特征金字塔网络和渐进特征金字塔网络中引入上采样来解决特征传播和交互的退化。Cf2模块中动态稀疏注意机制的应用实现了灵活的计算分配和内容感知。此外,所提出的模型被优化为稀疏和轻量级,从而可以部署在无人机边缘设备上。最后,在VisDrone2019和UAVDT数据集上验证了LUD-YOLO的有效性和优越性。消融和比较实验结果表明,与原始算法相比,LUDY-N 和 LUDY-S 在各种评价指标中都表现出了优异的性能,表明所提出的改进策略使模型具有更好的鲁棒性和泛化性。此外,与其他多个流行的竞争对手相比,所提出的改进策略使LUD-YOLO具有最佳的整体性能,为无人机目标检测提供了有效的解决方案,同时平衡了模型大小和检测精度。
改进点:
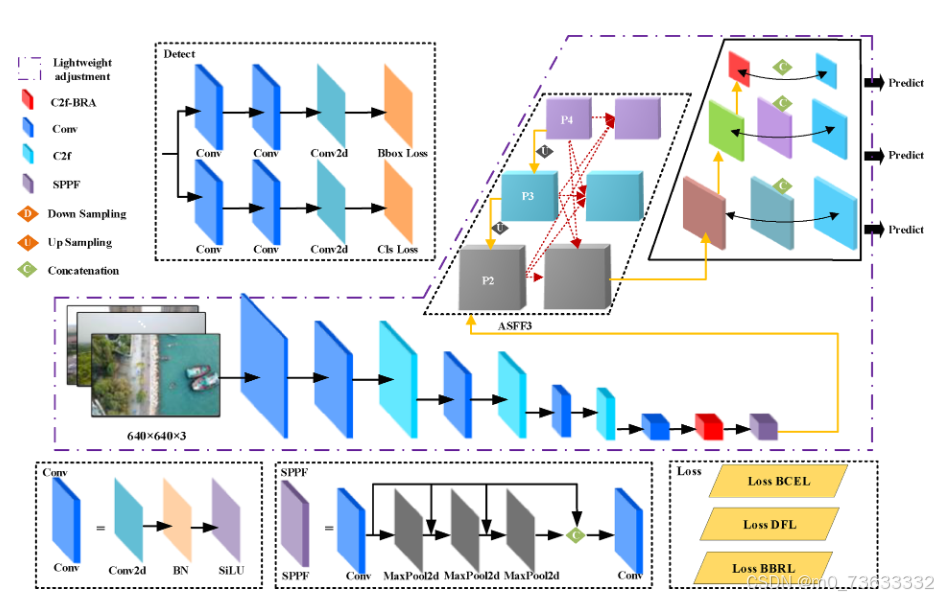
- 提出了一种新的图像特征融合方法,该方法利用自适应空间融合操作对多阶段融合过程中的特征进行过滤,实现质量更高、语义差距较小的特征融合。——就是引入了AFPN的网络架构
- 构建了一种新的特征提取模块C2f BRA,将特征的稀疏表示引入到Backbone中,并利用自注意机制捕获远距离上下文语义连接,减少模型参数,提高推理速度。——应用了具有稀疏关系的注意力机制 Biform 模块
- 对目前提出的LUD-YOLO进行剪枝操作,在保证精度的同时最小化网络的复杂度。
除了上述的改进,该作者设计了俩个模型分别基于YOLOV8的N,S模型进行改进,得到LUDY-N,LUDY-S俩个模型,这俩个模型还分别适用于不同的场景。
网络结构图
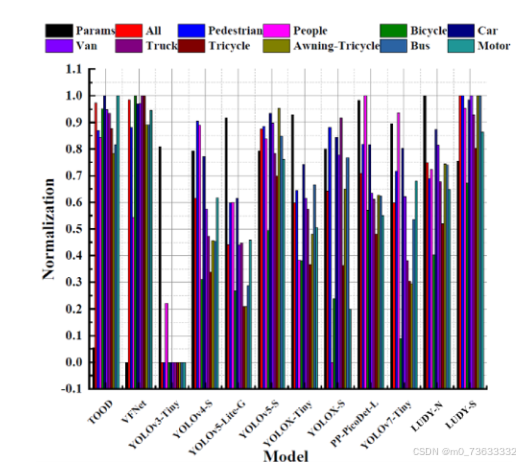
改进后的模型对比图
论文的数据集采用也是非常大,VisDrone2019包含超过 6,000 个视频序列和超过 25,000 张图像,涵盖了各种场景,例如城市、农村、高速公路和施工地点,以及在不同环境、天气条件和目标尺度。在此数据集下进行的消融和其他模型的对比。
除了这个数据集以外还采用其他的数据集验证模型的鲁棒性和实用性。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









