






 本文介绍了新手在使用RT-Thread操作系统时,通过SecureCRT遇到的串口通信问题和无法输入命令的问题,重点在于向量表重定位对调试的影响以及解决方法,旨在帮助其他开发者避免类似困扰。
本文介绍了新手在使用RT-Thread操作系统时,通过SecureCRT遇到的串口通信问题和无法输入命令的问题,重点在于向量表重定位对调试的影响以及解决方法,旨在帮助其他开发者避免类似困扰。
前言
作为刚开始入门RT-Thread操作系统的新手,在使用SecureCRT来作为调试软件时遇到无法输入命令行的问题,每个人的原因都不尽相同,本篇文章里说明的是我个人学习过程遇到的两种情况,算是对该类问题的补充,希望对大家有所帮助。
相关配置和SecureCRT的连接
1.开发环境
硬件:RT-Thread ART-Pi STM32H750XBH6开发板
软件:RT-Thread Studio、SecureCRT
2.SecureCRT的介绍
SecureCRT 是由 VanDyke Software 公司开发的一款终端模拟器和SSH客户端软件。它可以在不同操作系统上运行,包括 Windows、Mac 和 Linux。
SecureCRT 提供了一个用户友好的图形用户界面(GUI),可以用于连接和管理远程设备,例如通过 SSH、Telnet、RLogin 或串口进行远程访问。它能够提供安全的加密通信和认证,确保数据传输的机密性和完整性。
总的来说,SecureCRT 是一款功能强大、安全可靠的终端模拟器和SSH客户端软件,适用于连接和管理远程设备,并进行终端调试和远程访问。
3.SecureCRT的连接
关于软件的安装破解网上有很多文章都有讲解,在此就不多赘述了。
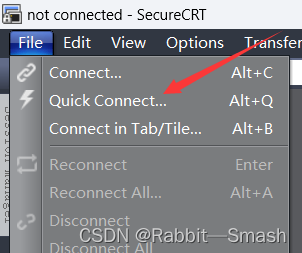
首先打开软件,点击File,选择quick connect选项,创建项目。
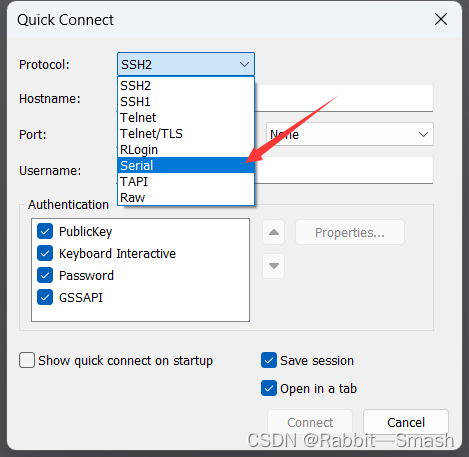
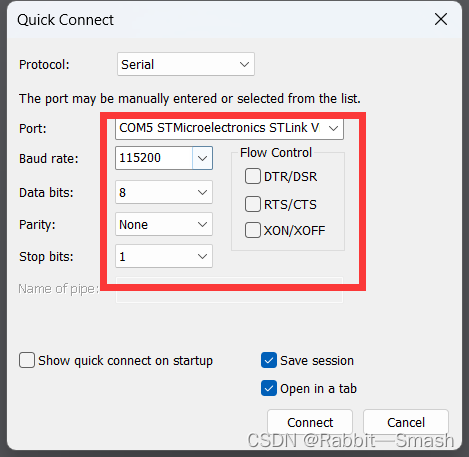
一般我们选择serial(串口)选项,设置相应的波特率,比较位等。
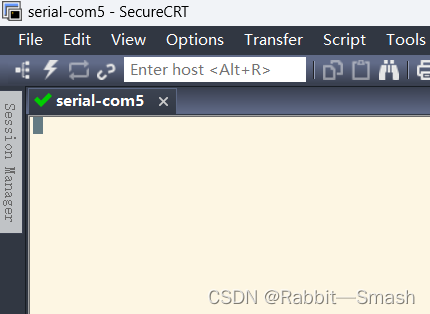
如图所示就是连接成功了。
问题概述
1.main.c程序
这个程序的作用是创建一个动态线程,如果线程创建并启动成功,那么就会进入线程处理函数,在securecrt软件界面打印出“th_entry running...”
#include <rtthread.h>
#include <rtdevice.h>
#include "drv_common.h"
#include "stm32h7xx.h"
#include "rtdbg.h"
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
rt_thread_t th1_ptr = NULL;
//线程处理函数
void th1_entry(void *parameter)
{
rt_kprintf("th_entry running...\n");
rt_thread_mdelay(2000);
}
int main(void)
{
th1_ptr = rt_thread_create("th1_demo", th1_entry, NULL,1024, 20, 5);
if(th1_ptr == RT_NULL)
{
LOG_E("rt_thread_create failed...\n");
return -RT_ERROR;
}
LOG_D("rt_thread_create successed...\n");
rt_thread_startup(th1_ptr);
}2.理想效果展示
正确的效果应该是如下图所示
但是实际上在一开始因为某些原因并未达到图示效果。
结果就是这样(无法打开串口,连接不上)
或者这样,连接上了,但是与正确效果相比缺少了msh(Mini-Shell)行,根本无法输入命令,也就是说无法进行调试。
解决方法
1.针对无法打开串口的情况
对于串口问题,在排除开发板烧坏和数据线接触不良的情况下,一般是串口被占用了(正常情况下都是软件上的问题)。
首先检查自己有没有在连接CRT之前打开(连接)过其他串口调试工具软件,包括但不限于开发软件中自带的串口调试工具。
如果有,将其关闭后再打开连接CRT,然后重新编译、烧录程序(记得手动复位一下)。
2.针对无法输入命令的情况
对于能成功显示但是无法输入命令的问题,个人实践下来是因为main.c文件中缺少下面的这个函数
static int vtor_config(void)
{
/* Vector Table Relocation in Internal QSPI_FLASH */
SCB->VTOR = QSPI_BASE;
return 0;
}
INIT_BOARD_EXPORT(vtor_config);代码解释:
这段代码的作用是将 Cortex-M 处理器的向量表(Vector Table)重定位到内部的 QSPI_FLASH。
具体来说,这段代码中的 vtor_config 函数将 SCB->VTOR 寄存器(System Control Block 中的向量表偏移寄存器)设置为 QSPI_BASE,即将 Cortex-M 处理器的向量表地址设置为 QSPI_FLASH 的基地址。
通过将向量表重定位到 QSPI_FLASH,可以有效地使用 QSPI_FLASH 存储空间来存放中断向量和中断服务例程,减少对系统内存的占用,并提高系统的性能和效率。
这段代码的返回值为 0,意味着函数执行成功。
如果缺少这段代码,那么可能会导致以下的问题:
- 内存占用:向量表通常占用一定的存储空间,如果不进行重定位,向量表可能会存放在 RAM 中,占用宝贵的内存空间。
- 性能问题:如果向量表存放在较慢的存储器中(如 RAM)而不是 QSPI_FLASH 中,可能会导致中断响应的延迟增加,影响系统的实时性和性能。
- 系统稳定性:如果在重定位向量表前执行中断处理程序,可能会导致处理器访问到错误的中断服务例程地址,从而引发系统故障或异常行为。
当进行终端调试时,如果向量表没有正确地被重定位到QSPI_FLASH,可能会导致调试器无法正确读取向量表中的中断服务例程地址,从而影响调试器对中断处理的观察和分析,甚至可能导致调试器无法正确地中断处理。
3.正确程序和效果演示
#include <rtthread.h>
#include <rtdevice.h>
#include "drv_common.h"
#include "stm32h7xx.h"
#include "rtdbg.h"
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
rt_thread_t th1_ptr = NULL;
//线程处理函数
void th1_entry(void *parameter)
{
rt_kprintf("th_entry running...\n");
rt_thread_mdelay(2000);
}
int main(void)
{
th1_ptr = rt_thread_create("th1_demo", th1_entry, NULL,1024, 20, 5);
if(th1_ptr == RT_NULL)
{
LOG_E("rt_thread_create failed...\n");
return -RT_ERROR;
}
LOG_D("rt_thread_create successed...\n");
rt_thread_startup(th1_ptr);
}
static int vtor_config(void)
{
/* Vector Table Relocation in Internal QSPI_FLASH */
SCB->VTOR = QSPI_BASE;
return 0;
}
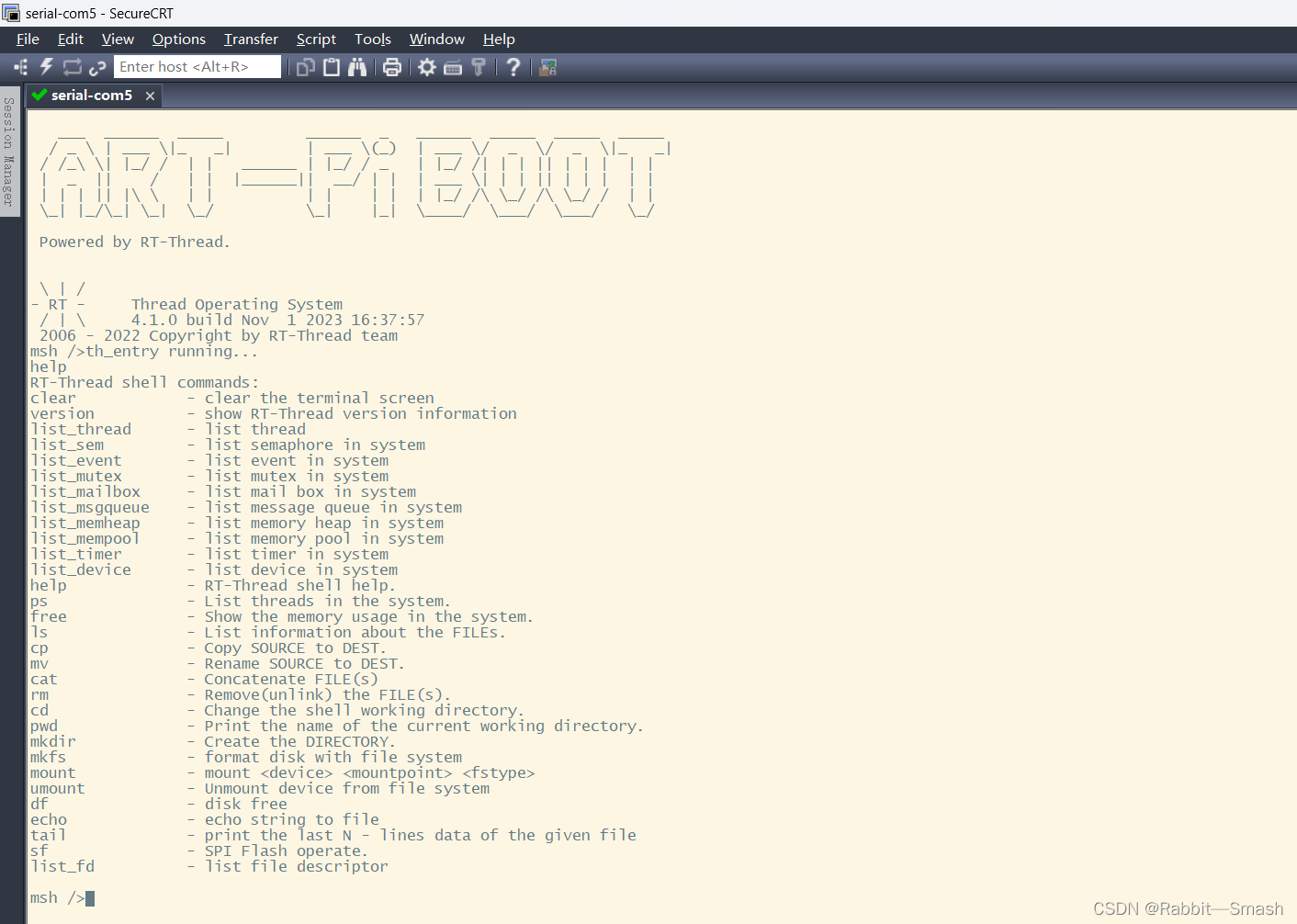
INIT_BOARD_EXPORT(vtor_config);输入help指令,效果如图所示。
总结
以上是我个人在学习中遇到的一些问题和总结,写文章是为了记录同时也是为了分享,希望这篇文章能对你有所帮助。

















 5214
5214

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









