






资料编号:154 下面是相关功能视频演示:
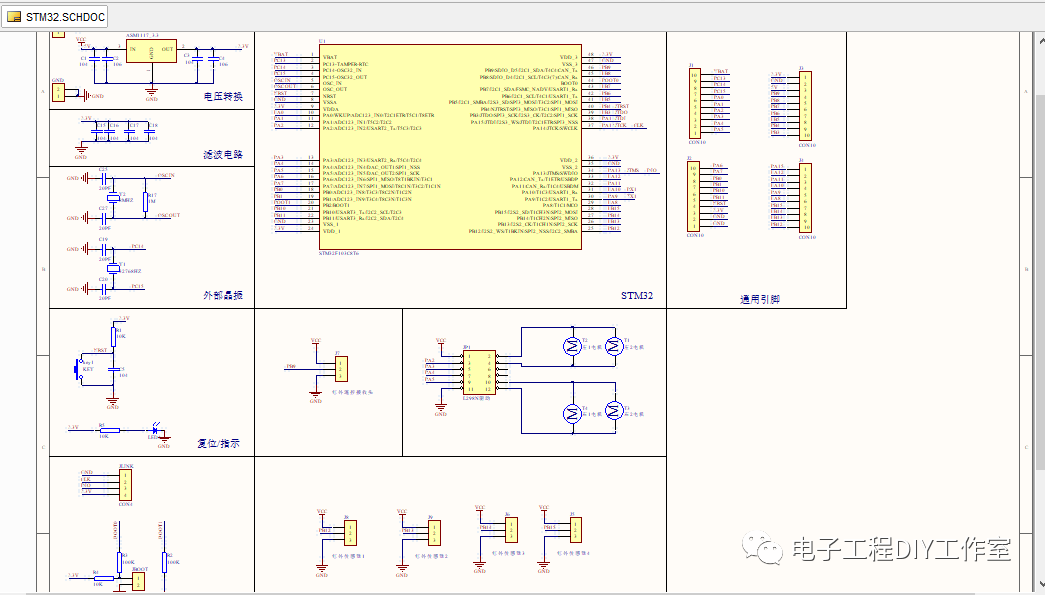
154-基于STM32单片机红外遥控自动泊车智能车(原理图+源码+全套资料)
功能介绍:
采用stm32单片机作为控制CPU,采用红外接收遥控接收控制信号,采用红外对射传感器来采集小车与障碍物之间的距离,采用L298N电机驱动来驱动小车的前进后退,在红外遥控发出泊车命令后,小车会自动进行倒车入库,完成自动泊车,并且遥控能够控制小车的前进后退左右行驶,全套实物资料齐全:
下面是该程序的分享下资链接:
int main(void)
{
u8 key;
u8 t=0;
u8 *str=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
// LCD_Init();
// Beep_Init();
Remote_Init(); //红外接收初始化
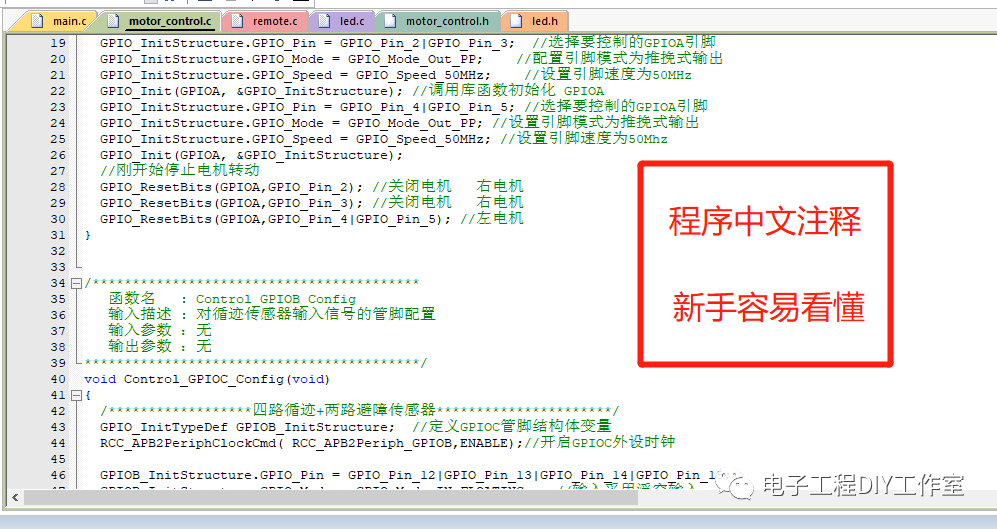
GPIO_Configuration();//电机
Control_GPIOC_Config();//传感器
// POINT_COLOR=RED; //设置字体为红色
// LCD_ShowString(30,50,200,16,16,"STM32 CAR");
// LCD_ShowString(30,70,200,16,16,"REMOTE CAR");
// LCD_ShowString(30,90,200,16,16,"SPEED: ");
// LCD_ShowString(30,130,200,16,16,"KEYVAL:");
// LCD_ShowString(30,150,200,16,16,"KEYCNT:");
// LCD_ShowString(30,170,200,16,16,"SYMBOL:");
LED0=!LED0;
delay_ms(100);
LED0=!LED0;
while(1)
{
key=Remote_Scan();
if(key)
{
// LCD_ShowNum(86,130,key,3,16); //显示键值
// LCD_ShowNum(86,150,RmtCnt,3,16); //显示按键次数
switch(key)
{
case 24: Forward_run();str="UP";break; //UP
case 74: Backward_run();str="DOWN";break; //DOWN
case 16: LEFT();str="LEFT";break; //LEFT
case 90: RIGHT();str="RIGHT";break; //RIGHT
case 56: Stop();str="STOP";break; //STOP
case 162: LED_L();str="1";break; //"1"
case 98: LED_M();str="2";break; //"2"
case 226: Left_Back();str="AUTO_PARKING";break; //"3"
case 34: X_J();str="TRACKING";break; //"4"
}
// LCD_Fill(86,170,116+8*8,170+16,WHITE); //清楚之前的显示
// LCD_ShowString(86,170,200,16,16,str); //显示SYMBOL
}else delay_ms(10);
t++;
if(t==50)
{
t=0;
LED0=!LED0;
}
}
}
下面是该资料的分享下载链接:















 1004
1004











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









