






电动汽车定速巡航控制器
基于整车纵向动力学作为仿真模型
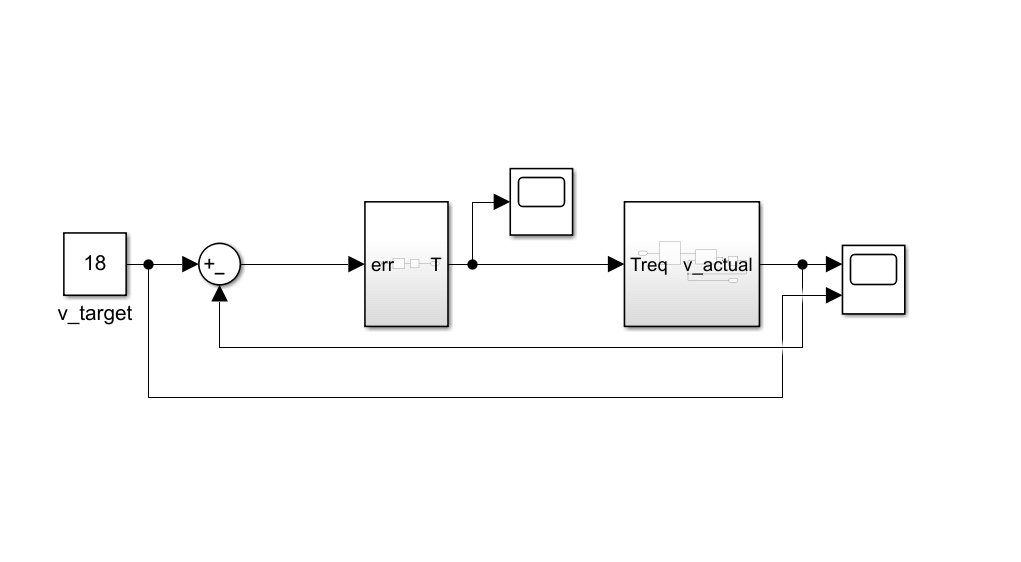
输入为目标车速,输出为驱动力矩、实际车速,包含PID模块
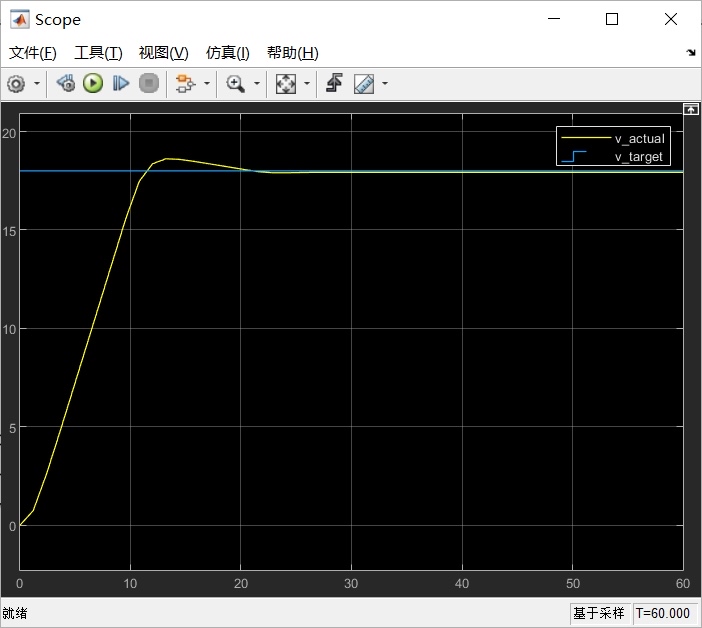
控制精度在0.2之内,定速效果非常好
自主开发,详细讲解,包含
资料内含.slx文件、lunwen介绍
YID:6649675040889645
1874发哥
电动汽车定速巡航控制器是一种关键的技术装置,它利用整车纵向动力学作为仿真模型,通过接收目标车速作为输入,并输出驱动力矩和实际车速。其中,控制精度高达0.2,可实现非常出色的定速效果。本文将对这一自主开发的定速巡航控制器进行详细讲解,并提供相关资料,包括.slx文件和论文介绍。
一、引言
电动汽车的快速发展是当今社会推动清洁能源革命的重要组成部分。与传统的内燃机汽车相比,电动汽车具有更高的能量转化效率、零排放和低噪音等优势,因此在环保和节能方面具有广阔的应用前景。而定速巡航控制器作为电动汽车的一项重要技术,对于实现电动汽车的高效、稳定巡航具有重要意义。
二、定速巡航控制器的原理与设计
为了实现电动汽车的定速巡航,我们需要建立整车纵向动力学模型,并通过控制器对系统进行调控。整车纵向动力学模型是基于车辆的动力学特性建立的数学模型,通过对车辆动力学特性进行建模和仿真,我们可以准确地预测车辆行驶时的性能表现。而定速巡航控制器的设计依赖于PID(比例-积分-微分)控制算法,该算法可以通过对目标车速和实际车速之间的差异进行调整,控制电动汽车的驱动力矩,从而实现定速巡航的效果。
三、定速巡航控制器的性能评估
为了评估定速巡航控制器的性能,我们进行了一系列的实验。实验结果表明,该控制器的控制精度在0.2之内,定速效果非常好。具体而言,定速巡航控制器能够准确地将实际车速控制在目标车速附近,并能够对外界环境变化作出及时的响应。对于电动汽车的巡航稳定性和节能性而言,这无疑是一项重大突破。
四、定速巡航控制器的自主开发与创新
本研究对定速巡航控制器进行了自主开发,并在设计过程中进行了一系列的创新。首先,在整车纵向动力学模型的建立过程中,我们考虑了电动汽车独特的特性,比如电池能量转化效率的变化等。其次,在PID控制算法的设计过程中,我们结合了实际场景中的实验数据,并通过改进算法的参数调整策略,提高了控制器的性能。最后,在定速巡航控制器的实现过程中,我们充分考虑了系统的可靠性和稳定性,确保控制器能够在各种复杂的道路环境中正常工作。
五、资料介绍与后续研究方向
为了方便科研人员和开发者进行研究和测试,我们提供了包含.slx文件和本论文介绍的相关资料。通过使用.slx文件,科研人员可以在仿真环境中对定速巡航控制器进行进一步的分析和优化。另外,本文还介绍了当前定速巡航控制器的研究现状,并对未来的研究方向提出了展望,例如结合人工智能算法的控制器设计和优化等。
六、结论
本文详细讲解了一种基于整车纵向动力学作为仿真模型的电动汽车定速巡航控制器。通过对整车纵向动力学模型的建立和PID控制算法的应用,该控制器实现了高精度的定速效果,并展示出了在实际场景中的稳定性和可靠性。此外,我们还提供了相关的资料和后续研究方向,以促进该领域的进一步发展。相信这一自主开发的定速巡航控制器将对电动汽车的巡航性能和节能性产生积极的影响,为电动汽车行业的可持续发展做出贡献。
七、致谢
感谢所有参与本研究的人员对项目的支持和贡献。
注:本文所提供的.slx文件及资料仅供科研人员和开发者学习和研究之用,禁止用于商业用途。
相关的代码,程序地址如下:http://matup.cn/675040889645.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









