







智能 AI 人工智能机器人系统方案设计
一、引言
随着人工智能技术的快速发展,智能 AI 机器人在各个领域的应用越来越广泛。本方案旨在设计一个功能强大、智能高效、交互友好的人工智能机器人系统,以满足不同场景下的用户需求。
二、系统概述
1. 系统目标
- 能够理解和处理自然语言,与用户进行流畅的对话。
- 具备知识学习和推理能力,能够回答各种问题并提供准确的信息。
- 实现情感识别和表达,提供个性化的服务和互动体验。
- 具备自主移动和操作能力,完成特定的任务。
- 支持多模态交互,包括语音、图像、手势等。
2. 系统组成
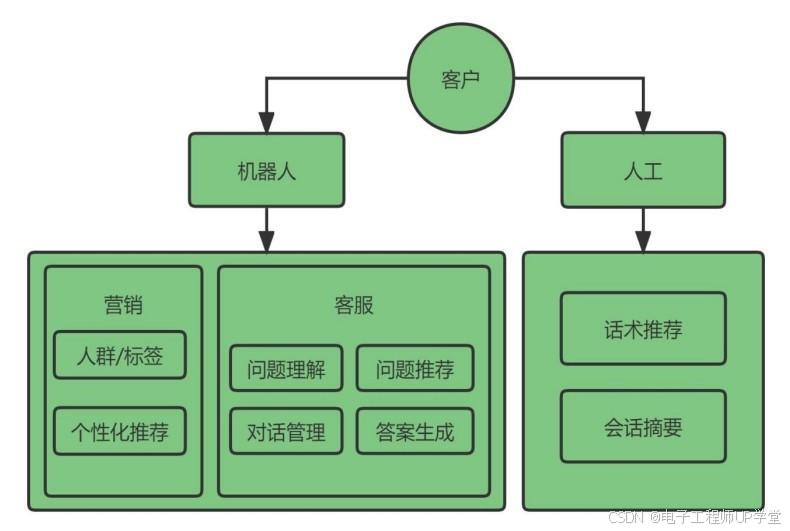
- 智能 AI 机器人系统主要由感知模块、认知模块、决策模块、执行模块、交互模块和电源模块组成。

三、感知模块
1. 传感器
- 安装视觉传感器(摄像头),用于获取图像和视频信息。
- 配备语音传感器(麦克风),采集声音信号。
- 利用距离传感器(激光雷达、超声波传感器等),感知周围环境的距离和障碍物。
- 部署触觉传感器(压力传感器等),获取接触和力的信息。
2. 数据预处理
- 对采集到的原始数据进行滤波、降噪、归一化等预处理操作,提高数据质量。
四、认知模块
1. 自然语言处理
- 利用词法分析、句法分析、语义理解等技术,解析用户输入的自然语言。
- 基于大规模语料库和语言模型,进行文本生成和回答生成。
2. 知识图谱
- 构建丰富的知识图谱,涵盖常见的领域知识和常识性信息。
- 通过知识推理和查询,为回答问题提供支持。
3. 机器学习算法
- 运用深度学习算法,如卷积神经网络(CNN)、循环神经网络(RNN)等,进行图像识别、语音识别等任务。
- 采用强化学习算法,训练机器人的决策策略。
五、决策模块
1. 规划与决策算法
- 基于感知和认知的结果,制定机器人的行动策略和任务规划。
- 考虑环境变化和用户需求,动态调整决策方案。
2. 风险评估与应对
- 对可能出现的风险和不确定性进行评估,并制定相应的应对措施。
六、执行模块
1. 移动机构
- 采用轮式、履带式或足式移动方式,实现机器人的自主移动。
- 配备驱动电机和运动控制器,精确控制移动速度和方向。
2. 操作手臂(可选)
- 设计多自由度的机械手臂,完成抓取、放置等操作任务。
- 安装力传感器和位置传感器,实现精确的力控和位控。

七、交互模块
1. 语音交互
- 通过语音合成技术,将生成的回答转换为自然流畅的语音输出。
- 支持多种语音风格和语调的选择。
2. 图像显示
- 配备显示屏,展示相关的信息、图像和表情。
3. 手势识别与响应
- 识别用户的手势指令,并做出相应的动作或回答。
八、电源模块
1. 电池选择
- 选用高能量密度、长续航的电池,如锂离子电池。
- 考虑电池的充电速度和循环寿命。
2. 电源管理
- 设计高效的电源管理系统,实时监测电池电量,优化能耗分配。
- 支持有线充电和无线充电方式。
九、软件与算法
1. 操作系统
- 选用适合机器人应用的实时操作系统,如 ROS(Robot Operating System)。
2. 开发框架
- 基于深度学习框架,如 TensorFlow、PyTorch 等,进行模型训练和优化。
3. 应用程序
- 开发各种应用程序,如导航、对话、任务执行等,满足不同的功能需求。
十、安全与隐私保护
1. 物理安全
- 设计坚固的外壳和结构,防止碰撞和损坏。
- 安装紧急制动装置,保障在紧急情况下的安全停止。
2. 数据安全
- 对采集到的数据进行加密存储和传输,保护用户隐私。
- 建立严格的访问控制机制,防止数据泄露。
3. 伦理规范
- 遵循相关的伦理和法律准则,确保机器人的使用符合道德和社会价值观。
十一、系统集成与测试
1. 硬件集成
- 对各个硬件模块进行组装和连接,确保系统的稳定性和可靠性。
2. 软件集成
- 整合各个软件模块,进行接口调试和系统联调。
3. 性能测试
- 对机器人的感知、认知、决策、执行和交互等功能进行全面的性能测试。
- 评估系统的准确性、响应速度、稳定性等指标。
4. 用户体验测试
- 邀请用户进行实际使用测试,收集反馈意见,优化系统设计。
十二、成本控制
1. 硬件选型优化
- 在满足性能要求的前提下,选择性价比高的硬件组件。
2. 软件开发效率提升
- 采用敏捷开发方法,提高软件开发效率,降低开发成本。
十三、总结
本智能 AI 人工智能机器人系统方案综合考虑了感知、认知、决策、执行、交互等多个方面,通过先进的技术和合理的设计,实现了一个具有高度智能和实用性的机器人系统。在实际开发过程中,应根据具体的应用场景和用户需求,进一步细化和优化各个模块的功能,以提供更优质的服务和体验。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











