







前面介绍了用OpenCV的squares实例定位车牌的算法,效果不是很理想。车牌定位的方法有很多种,这里我们从汽车图像的纹理特征入手,找出车牌不同于背景的特征是车牌定位的关键。观察多幅汽车图片我们会发现车身和背景的纹理多为横向纹理,而车牌字符则为竖向纹理,基于这个纹理特征我们可以区别处车牌位置。车牌的定位我们可以分为如下几个步骤:
1预处理
图像的预处理主要是为了后续处理的需要进行一些滤波和梯度增强的处理,以滤除噪声和垂直方向上的增强。
2 Sobel垂直方向边缘检测并2值化
一般的边缘检测的方法检测到的边缘信息含有大量的无用信息,这里我们使用Sobel边缘检测算子对图像进行垂直边缘检测,由于车牌字符的竖向纹理特征我们可以检测到车牌字符,对得到的边缘图像进行2值化,排除一些噪声并增强字符边缘。
3形态学变换
汽车图像还存在一些竖向的纹理(如车身,车灯等)我们需要排除这些干扰信息,并把临近的字符边缘连通起来。这一阶段主要利用对图像进行形态学操作,即作闭合(先膨胀在腐蚀)开启(先腐蚀再膨胀)运算,膨胀可以把临近边缘连接成一个整体,腐蚀可以滤除一些细碎的边缘(建议使用3*1的结构进行操作)经过形态学变换可以滤除噪声边缘,得到车牌区域。
4筛选
大多数图像经过形态学变化后都可以得到满意的效果,但由于图像背景的一些特殊纹理,可能会留下一些没有滤除的边缘,也有可能字符间空隙较大,车牌区域出现分为几部分的状况,还有可能车身的一些标语等被误认为是车牌图像等,我们还需要进行聚类和筛选。
选取一个标准来判断连通域(如竖直方向两区域重合大于10像素,水平方向两区域距离小于10像素)在根据车牌的形状大小(宽,高)判断是否为车牌区。
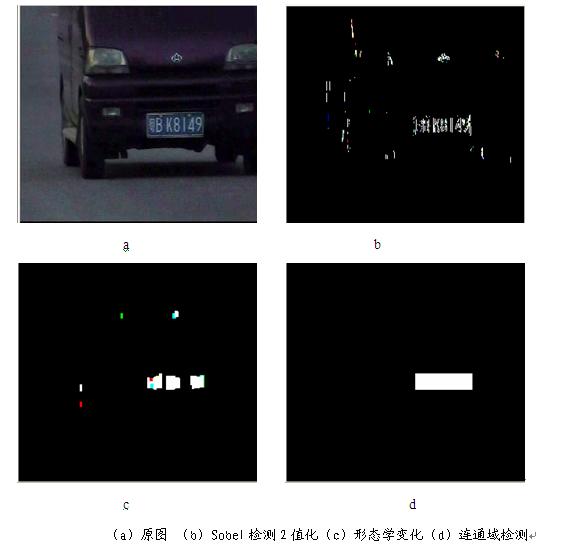
程序运行效果图如下:
本文来自CSDN博客,转载请标明出处:http://blog.csdn.net/heihei723/archive/2006/05/14/728046.aspx















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









