







到昨天为止我们讲到的启动区,虽然也称为IPL(Initial Program Loader,启动程序装载器),但它实质上并没有装载任何程序。而从今天起,我们要真的用它来装载程序了。
因为磁盘最初的512字节是启动区,所以要装载下一个512字节的内容。我们来修改一下程序。改好的程序就是projects/03_day下的harib00a,像以前一样,我们把它复制到tolset里来。
这次添加的内容大致如下。
本次添加的部分
MOV AX,0x0820
MOV ES, AX
MOV CH,0 ; 柱面0
MOV DH,0 ; 磁头0
MOV CL,2 ; 扇区2

MOV AH,0x02 ; AH=0x02 : 读盘
MOV AL,1 ; 1个扇区
MOV BX,0
MOV DL,0x00 ; A驱动器
INT 0x13 ; 调用磁盘BIOS
JC error
新出现的指令只有JC。所谓JC,是“jump if carry”的缩写,意思是如果进位标志(carry flag)是1的话,就跳转。
至于“INT 0x13”这个指令,我们虽然知道这是要调用BIOS的0x13号函数,但还不明白它到底是干什么用的,那就来查一下吧:
我们找到如下的内容:
❏ 磁盘读、写,扇区校验(verify),以及寻道(seek)
AH=0x02;(读盘)
AH=0x03;(写盘)
AH=0x04;(校验)
AH=0x0c;(寻道)
AL=处理对象的扇区数;(只能同时处理连续的扇区)
CH=柱面号 &0xff;
CL=扇区号(0-5位)|(柱面号&0x300)>>2;
DH=磁头号;
DL=驱动器号;
ES:BX=缓冲地址;(校验及寻道时不使用)
返回值:
FLAGS.CF==0:没有错误,AH==0
FLAGS.CF==1:有错误,错误号码存入AH内(与重置(reset)功能一样)
我们这次用的是AH=0x02,哦,原来是“读盘”的意思。
返回值那一栏里的FLAGS.CF又是什么意思呢?这就是我们刚才讲到的进位标志。也就是说,调用这个函数之后,如果没有错,进位标志就是0;如果有错,进位标志就是1。这样我们就能明白刚才为什么要用JC指令了。
进位标志是一个只能存储1位信息的寄存器,除此之外,CPU还有其他几个只有1位的寄存器。像这种1位寄存器我们称之为标志。标志在英文中为flag,是旗帜的意思。标志之所以叫flag是因为它的开和关就像升旗降旗的状态一样。
所谓进位标志,本来是用来表示有没有进位(carry)的,但在CPU的标志中,它是最简单易用的,所以在其他地方也经常用到。这次就是用来报告BIOS函数调用是否有错的。
其他几个寄存器我们也来依次看一下吧。CH、CL、DH、DL分别是柱面号、扇区号、磁头号、驱动器号,一定不要搞错。在上面的程序中,柱面号是0,磁头号是0,扇区号是2,磁盘号是0。
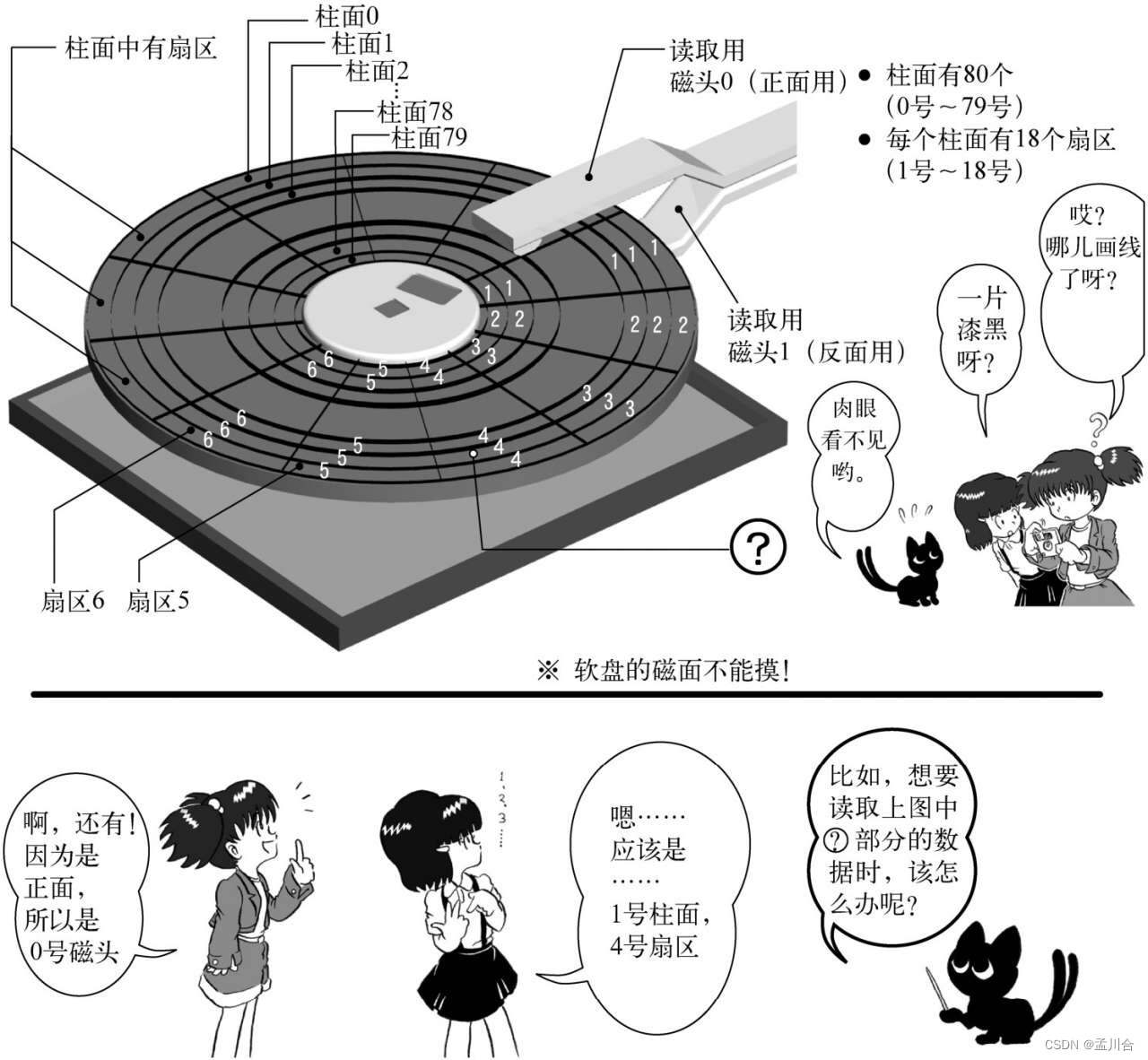
软盘分为18份,每一份称为一个扇区。一个圆环有18个扇区,分别称为扇区1、扇区2、……扇区18。
综上所述,1张软盘有80个柱面,2个磁头,18个扇区,且一个扇区有512字节。所以,一张软盘的容量是:
80×2×18×512=1474 560 Byte=1440KB。
含有IPL的启动区,位于C0-H0-S1(柱面0,磁头0,扇区1的缩写),下一个扇区是C0-H0-S2。这次我们想要装载的就是这个扇区。
在指定内存地址的时候,可以使用段寄存器。
我们使用段寄存器时,以ES:BX这种方式来表示地址,写成“MOV AL, [ES:BX]”,它代表ES×16+BX的内存地址。我们可以把它理解成先用ES寄存器指定一个大致的地址,然后再用BX来指定其中一个具体地址。
这样如果在ES里代入0xffff,在BX里也代入0xffff,就是1114 095字节,也就是说可以指定1M以内的内存地址了。虽然这也还是远远不到64M,但当时英特尔公司的大叔们,好像觉得这就足够了。在最初设计BIOS的时代,这种配置已经很能满足当时的需要了,所以我们现在也还是要遵从这一规则。因此,大家就先忍耐一下这1MB内存的限制吧。
这次,我们指定了ES=0x0820, BX=0,所以软盘的数据将被装载到内存中0x8200到0x83ff的地方。可能有人会想,怎么也不弄个整点的数,比如0x8000什么的,那多好。但0x8000~0x81ff这512字节是留给启动区的,要将启动区的内容读到那里,所以就这样吧。
那为什么使用0x8000以后的内存呢?这倒也没什么特别的理由,只是因为从内存分布图上看,这一块领域没人使用,于是笔者就决定将我们的“纸操作系统”装载到这一区域。0x7c00~0x7dff用于启动区,0x7e00以后直到0x9fbff为止的区域都没有特别的用途,操作系统可以随便使用。
到目前为止我们开发的程序完全没有考虑段寄存器,但事实上,不管我们要指定内存的什么地址,都必须同时指定段寄存器,这是规定。一般如果省略的话就会把“DS:”作为默认的段寄存器。
以前我们用的“MOV CX, [1234]”,其实是“MOV CX, [DS:1234]”的意思。“MOV AL, [SI]”,也就是“MOV AL, [DS:SI]”的意思。在汇编语言中,如果每回都这样写就太麻烦了,所以可以省略默认的段寄存器DS。因为有这样的规则,所以DS必须预先指定为0,否则地址的值就要加上这个数的16倍,就会读写到其他的地方,引起混乱。
软盘这东西很不可靠,有时会发生不能读数据的状况,所以我们决定重试5次,再不行的话就真正放弃。改良后的程序就是projects/03_day下的harib00b。
本次添加的部分
;读磁盘

MOV AX,0x0820
MOV ES, AX
MOV CH,0 ; 柱面0
MOV DH,0 ; 磁头0
MOV CL,2 ; 扇区2

MOV SI,0 ; 记录失败次数的寄存器
retry:
MOV AH,0x02 ; AH=0x02 : 读入磁盘
MOV AL,1 ; 1个扇区
MOV BX,0
MOV DL,0x00 ; A驱动器
INT 0x13 ; 调用磁盘BIOS
JNC fin ; 没出错的话跳转到fin
ADD SI,1 ; 往SI加1
CMP SI,5 ; 比较SI与5
JAE error ; SI >= 5时,跳转到error
MOV AH,0x00
MOV DL,0x00 ; A驱动器
INT 0x13 ; 重置驱动器
JMP retry
JNC是另一个条件跳转指令,是“Jump if not carry”的缩写。也就是说进位标志是0的话就跳转。
JAE也是条件跳转,是“Jump if above or equal”的缩写,意思是大于或等于时跳转。
出错时的处理:重新读盘之前,我们做了以下的处理,AH=0x00, DL=0x00, INT 0x13。通过前面介绍的网页我们知道,这是“系统复位”。它的功能是复位软盘状态,再读一次。
读到18扇区
我们趁着现在这劲头,再往后多读几个扇区吧。下面来看看projects/03_day下的harib00c。
JBE。这也是个条件跳转指令,是**“jump if below or equal”**的缩写,意思是小于等于则跳转。
程序做的事情很简单,只要读一读程序大家马上会明白。要读下一个扇区,只需给CL加1,给ES加上0x20就行了。CL是扇区号,ES指定读入地址。0x20是十六进制下512除以16的结果,如果写成“ADD AX,512/16”或许更好懂。
可能有人会想,这里为什么要用循环呢?这个问题很好。的确,这里不是非要用循环才行,在调用读盘函数的INT 0x13的地方,只要将AL的值设置成17就行了。这样,程序一下子就能将扇区2~18共17个扇区的数据完整地读进来。之所以将这部分做成循环是因为笔者注意到了磁盘BIOS读盘函数说明的“补充说明”部分。这个部分内容摘要如下:
❏ 指定处理的扇区数,范围在0x01~0xff(指定0x02以上的数值时,要特别注意能够连续处理多个扇区的条件。如果是FD的话,似乎不能跨越多个磁道,也不能超过64KB的界限。)
这些内容看起来很复杂。因为很难一两句话说清楚,这里暂不详细解释,就结果而言,这些注意事项目前跟我们还没有关系,就是写成AL=17结果也是完全一样的。但这样的方式在下一次的程序中,就会成为问题,因此为了能够循序渐进,这里特意用循环来一个扇区一个扇区地读盘。
虽然显示的画面没什么变化,但我们已经把磁盘上C0-H0-S2到C0-H0-S18的512×17=8704字节的内容,装载到了内存的0x8200~0xa3ff处。
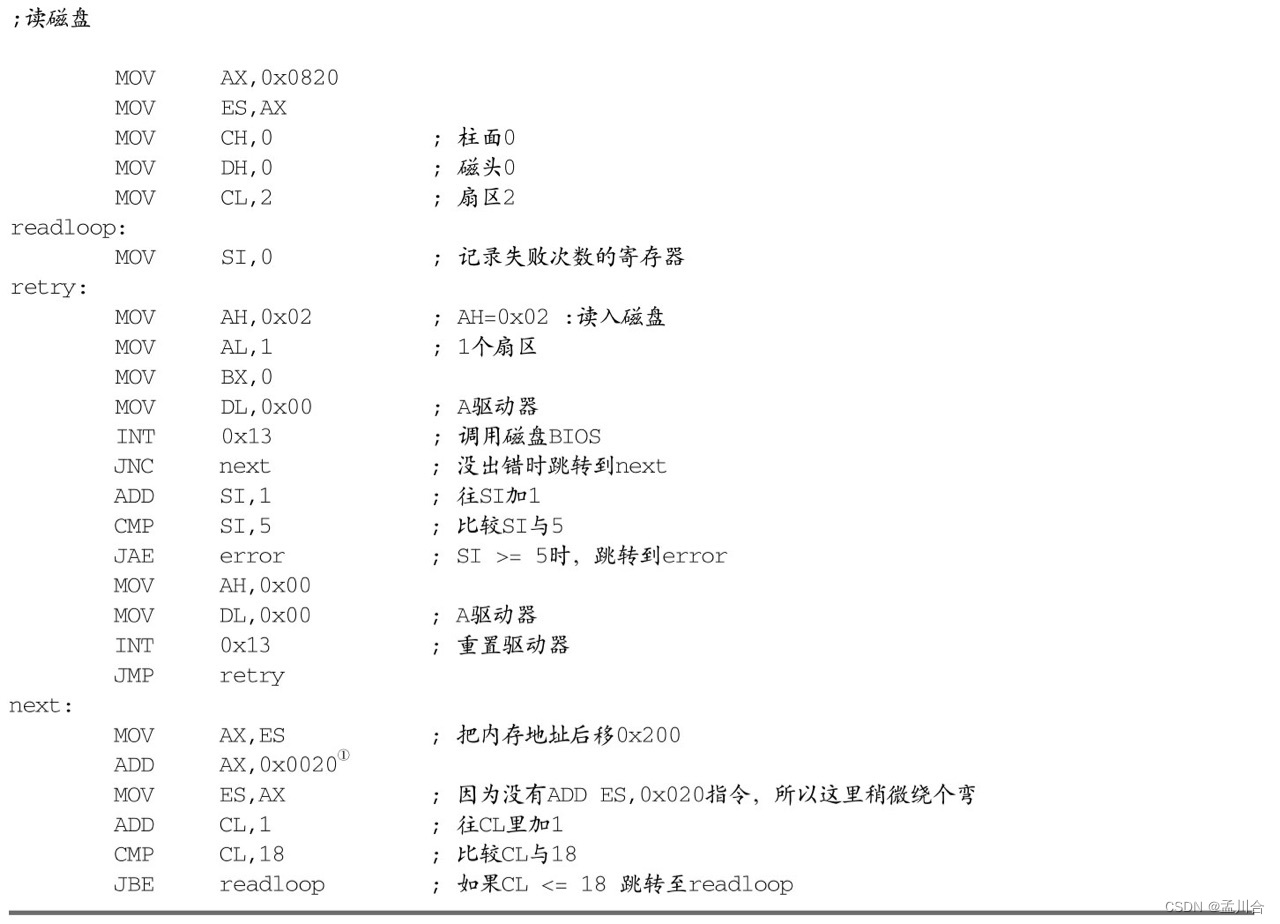
读入10个柱面
趁热打铁,我们继续学习下面的内容。C0-H0-S18扇区的下一扇区,是磁盘反面的C0-H1-S1,这次也从0xa400读入吧。按顺序读到C0-H1-S18后,接着读下一个柱面C1-H0-S1。我们保持这个势头,一直读到C9-H1-S18好了。现在我们就来看一看projects/03_day下的harib00d内容。
本次添加的部分
;读磁盘

MOV AX,0x0820
MOV ES, AX
MOV CH,0 ; 柱面0
MOV DH,0 ; 磁头0
MOV CL,2 ; 扇区2
readloop:
MOV SI,0 ; 记录失败次数的寄存器
retry:
MOV AH,0x02 ; AH=0x02 : 读入磁盘
MOV AL,1 ; 1个扇区
MOV BX,0
MOV DL,0x00 ; A驱动器
INT 0x13 ; 调用磁盘BIOS
JNC next ; 没出错时跳转到next
ADD SI,1 ; SI加1
CMP SI,5 ; 比较SI与5
JAE error ; SI >= 5时,跳转到error
MOV AH,0x00
MOV DL,0x00 ; A驱动器
INT 0x13 ; 重置驱动器
JMP retry

next:
MOV AX, ES ; 把内存地址后移0x200
ADD AX,0x0020
MOV ES, AX ; 因为没有ADD ES,0x020指令,所以这里稍微绕个弯
ADD CL,1 ; CL加1
CMP CL,18 ; 比较CL与18
JBE readloop ; 如果CL <= 18,则跳转至readloop
MOV CL,1
ADD DH,1
CMP DH,2
JB readloop ; 如果DH < 2,则跳转到readloop
MOV DH,0
ADD CH,1
CMP CH, CYLS
JB readloop ; 如果CH < CYLS,则跳转到readloop
JB。这也是条件跳转指令,是“jump if below”的缩写。翻译过来就是:“如果小于的话,就跳转。”
EQU指令。这相当于C语言的#define命令,用来声明常数。“CYLS EQU 10”意思是“CYLS = 10”。EQU是“equal”的缩写。只将它定义成常数是因为以后我们可能修改这个数字。
现在我们先随意定义成10个柱面,以后再对它进行调整(CYLS代表cylinders)。
现在启动区程序已经写得差不多了。如果算上系统加载时自动装载的启动扇区,那现在我们已经能够把软盘最初的10× 2× 18× 512=184320 byte=180KB内容完整无误地装载到内存里了。如果运行“make install”,把程序安装到磁盘上,然后用它来启动电脑的话,我们会发现装载过程还是挺花时间的。这证明我们的程序运行正常。画面显示依然没什么变化,但这个程序已经用从软盘读取的数据填满了内存0x08200~0x34fff的地方。
着手开发操作系统
总算写到这个题目了,这代表我们终于完成了启动区的制作。
下面,我们先来编写一个非常短小的程序,就只让它HLT。
最简单的操作系统?
fin:
HLT
JMP fin
将以上内容保存为haribote.nas,用nask编译,输出成haribote.sys。
接下来,将这个文件保存到磁盘映像haribote.img里。
可能有人不明白什么叫保存到映像里,其实就是像下面这样操作:
❏ 使用make install指令,将磁盘映像文件写入磁盘。
❏ 在Windows里打开那个磁盘,把haribote.sys保存到磁盘上。
❏ 使用工具将磁盘备份为磁盘映像。
大家仔细看,以上操作以磁盘映像文件开始,最终也是以磁盘映像文件结束。我们再来想像一下,如果不用借助磁盘和Windows就可以得到磁盘映像和文件,那多方便啊。这就是“保存到磁盘映像里”的意思。
能够完成这些工作的工具其实有很多,我们曾经使用过的edimg.exe就是其中之一。所以,这次还用这个工具。
那做这个工作究竟有什么意义呢?我们先做做看,然后再说明。……笔者对程序作了修改,得到了projects/03_day下的harib00e。当然对Makefile也相应做了改动。
接下来用“make img”指令来做个映像文件。执行完命令,映像文件也就做成了。
然后我们用二进制编辑器打开刚做成的映像文件“haribote.img”,看一看“haribote.sys”文件在磁盘中是什么样的。
最先注意到的地方是0x002600附近,磁盘的这个位置好像保存着文件名。
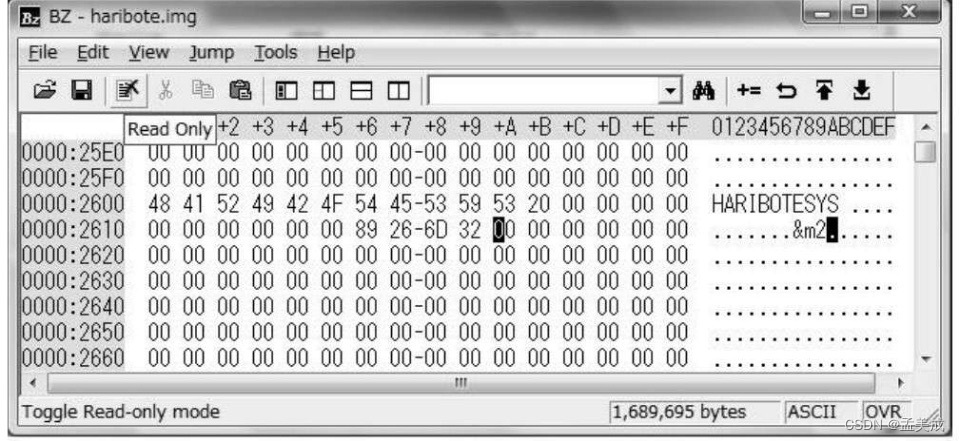
0x002600附近的样子
再往下看,找到0x004200那里,可以看到“F4 EB FD”。
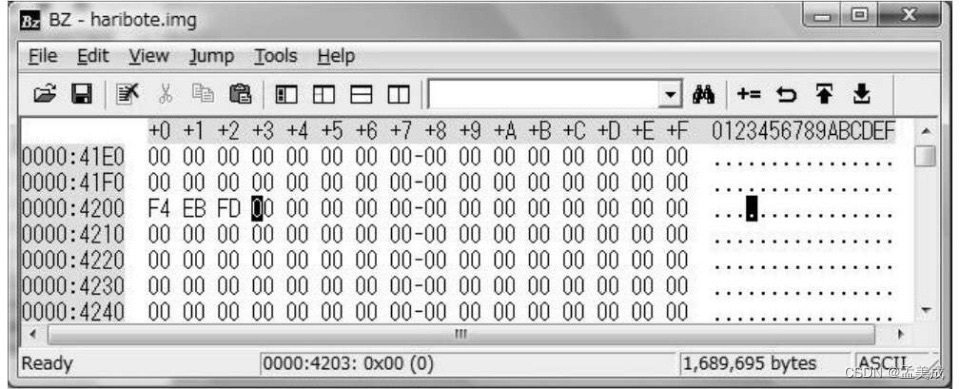
0x004200附近的样子
这是什么呢?这就是haribote.sys的内容。因为我们用二进制编辑器看haribote.sys,它恰好也就是这三个字节。
以上内容可以总结为:一般向一个空软盘保存文件时,
(1) 文件名会写在0x002600以后的地方;
(2) 文件的内容会写在0x004200以后的地方。这就是我们一直想知道的东西。了解了这一点,下面要做的事就简单了。我们将操作系统本身的内容写到名为haribote.sys文件中,再把它保存到磁盘映像里,然后我们从启动区执行这个haribote.sys就行了。接下来我们就来做这件事。
从启动区执行操作系统
那么,要怎样才能执行磁盘映像上位于0x004200号地址的程序呢?
现在的程序是从启动区开始,把磁盘上的内容装载到内存0x8000号地址,所以磁盘0x4200处的内容就应该位于内存0x8000+0x4200=0xc200号地址。
这样的话,我们就往haribote.nas里加上ORG 0xc200,然后在ipl.nas处理的最后加上JMP 0xc200这个指令。这样修改后,得到的就是“projects/03_day”下的harib00f。
赶紧运行“make run”,目前什么都没发生。那么程序到底有没有执行haribote.sys呢?大家可能会有点担心。所以,下面我们让haribote.sys跳出来表现一下。
确认操作系统的执行情况
怎么让它表现呢?如果还只是输出一条信息的话就太没意思了。考虑到将来我们肯定要做成Windows那样的画面,所以这次就来切换一下画面模式。我们这次做成的文件,就是projects/03_day下的harib00g。本次的haribote.nas
; haribote-os
; TAB=4

ORG 0xc200 ; 这个程序将要被装载到内存的什么地方呢?

MOV AL,0x13 ; VGA显卡,320x200x8位彩色
MOV AH,0x00
INT 0x10
fin:
HLT
JMP fin
设定AH=0x00后,调用显卡BIOS的函数,这样就可以切换显示模式了。我们还可以在支持网页(AT)BIOS里看看。
设置显卡模式(video mode)
❏ AH=0x00;
❏ AL=模式:(省略了一些不重要的画面模式)
0x03:16色字符模式,80× 25
0x12:VGA图形模式,640× 480× 4位彩色模式,独特的4面存储模式
0x13:VGA图形模式,320× 200× 8位彩色模式,调色板模式
0x6a:扩展VGA图形模式,800× 600× 4位彩色模式,独特的4面存储模式(有的显卡不支持这个模式)
❏ 返回值:无
参照以上说明,我们暂且选择0x13画面模式,因为8位彩色模式可以使用256种颜色,这一点看来不错。如果画面模式切换正常,画面应该会变为一片漆黑。也就是说,因为可以看到画面的变化,所以能判断程序是否运行正常。由于变成了图形模式,因此光标会消失。
另外,这次还顺便修改了其他一些地方。首先将ipl.nas的文件名变成了ipl10.nas。这是为了提醒大家这个程序只能读入10个柱面。另外,想要把磁盘装载内容的结束地址告诉给haribote.sys,所以我们在“JMP 0xc200”之前,加入了一行命令,将CYLS的值写到内存地址0x0ff0中。这样启动区程序就算完成了。
 赶紧“make run”看看。哦哦,画面一片漆黑。运行顺利!真是太好了! 有一点要先说明一下,现在我们把启动区里与haribote.sys没有关系的前后部分也读了进来,所以启动时很慢。可能会有人觉得这样做很浪费时间,但对于我们的纸娃娃操作系统来说,装载启动区这些部分,以后会起大作用的,所以暂时先忍耐一下吧。
赶紧“make run”看看。哦哦,画面一片漆黑。运行顺利!真是太好了! 有一点要先说明一下,现在我们把启动区里与haribote.sys没有关系的前后部分也读了进来,所以启动时很慢。可能会有人觉得这样做很浪费时间,但对于我们的纸娃娃操作系统来说,装载启动区这些部分,以后会起大作用的,所以暂时先忍耐一下吧。
32位模式前期准备
现在,汇编语言的开发告一段落,我们要开始以C语言为主进行开发了。笔者准备的C编译器,只能生成32位模式的机器语言。
所谓32位模式,指的是CPU的模式。CPU有16位和32位两种模式。如果以16位模式启动的话,用AX和CX等16位寄存器会非常方便,但反过来,像EAX和ECX等32位的寄存器,使用起来就很麻烦。
另外,16位模式和32位模式中,机器语言的命令代码不一样。同样的机器语言,解释的方法也不一样,所以16位模式的机器语言在32位模式下不能运行,反之亦然。
32位模式下可以使用的内存容量远远大于1MB。
另外,CPU的自我保护功能(识别出可疑的机器语言并进行屏蔽,以免破坏系统)在16位下不能用,但32位下能用。
既然有这么多优点,当然要使用32位模式了。
可是,如果用32位模式就不能调用BIOS功能了。这是因为BIOS是用16位机器语言写的。如果我们有什么事情想用BIOS来做,那就全部都放在开头先做,因为一旦进入32位模式就不能调用BIOS函数了。(当然,也有从32位返回到16位的方法,但是非常费工夫,所以不予赘述。)
再回头说说要使用BIOS做的事情。画面模式的设定已经做完了,接下来还想从BIOS得到键盘状态。所谓键盘状态,是指NumLock是ON还是OFF等这些状态。
所以,我们这次只修改了haribote.nas。修改后的程序就是projects/03_day下的harib00h。
本次的haribote.nas
; haribote-os
; TAB=4

; 有关BOOT_INFO
CYLS EQU 0x0ff0 ; 设定启动区
LEDS EQU 0x0ff1
VMODE EQU 0x0ff2 ; 关于颜色数目的信息。颜色的位数。
SCRNX EQU 0x0ff4 ; 分辨率的X(screen x)
SCRNY EQU 0x0ff6 ; 分辨率的Y(screen y)
VRAM EQU 0x0ff8 ; 图像缓冲区的开始地址

ORG 0xc200 ; 这个程序将要被装载到内存的什么地方呢?
MOV AL,0x13 ; VGA显卡,320x200x8位彩色
MOV AH,0x00
INT 0x10
MOV BYTE [VMODE],8 ; 记录画面模式
MOV WORD [SCRNX],320
MOV WORD [SCRNY],200
MOV DWORD [VRAM],0x000a0000

;用BIOS取得键盘上各种LED指示灯的状态
MOV AH,0x02
INT 0x16 ; keyboard BIOS
MOV [LEDS], AL

fin:
HLT
JMP fin
看一下程序就能明白,设置画面模式之后,还把画面模式的信息保存在了内存里。这是因为,以后我们可能要支持各种不同的画面模式,这就需要把现在的设置信息保存起来以备后用。
我们暂且将启动时的信息称为BOOT_INFO。
[VRAM]里保存的是0xa0000。在电脑的世界里,VRAM指的是显卡内存(video RAM),也就是用来显示画面的内存。这一块内存当然可以像一般的内存一样存储数据,但VRAM的功能不仅限于此,它的各个地址都对应着画面上的像素,可以利用这一机制在画面上绘制出五彩缤纷的图案。其实VRAM分布在内存分布图上好几个不同的地方。这是因为,不同画面模式的像素数也不一样。当画面模式为〇×时使用这个VRAM;而画面模式为◇△时可能使用那个VRAM,像这样,不同画面模式可以使用的内存也不一样。所以我们就预先把要使用的VRAM地址保存在BOOT_INFO里以备后用。
这次VRAM的值是0xa0000。这个值又是从哪儿得来的呢?还是来看看我们每次都参考的(AT)BIOS支持网页。在INT 0x10的说明的最后写着,这种画面模式下“VRAM是0xa0000~0xaffff的64KB”。
另外,我们还把画面的像素数、颜色数,以及从BIOS取得的键盘信息都保存了起来。保存位置是在内存0x0ff0附近。从内存分布图上看,这一块并没被使用,所以应该没问题。
开始导入C语言
终于准备就绪,现在我们直接切换到32位模式,然后运行用C语言写的程序。这就是projects/03_day下的harib00i。程序里添加和修改了很多内容。
首先是haribote.sys,它的前半部分是用汇编语言编写的,而后半部分则是用C语言编写的。所以以前的文件名haribote.nas也随之改成了asmhead.nas。并且,为了调用C语言写的程序,添加了100行左右的汇编代码。虽然笔者也很想现在就讲这100行新添的程序,但是很抱歉,还是先跳过这部分吧。等我们再往后多学一点,再回过头来仔细讲解这段程序。其实笔者曾多次对这一部分进行说明,但每次都写得很长很复杂,恐怕大家很难理解。等到后面,大家掌握的内容多了,这一部分再理解起来也就轻松了,所以暂时先不做说明了。
下面讲C语言部分。文件名是bootpack.c。为什么要起这样的名字呢?因为以后为了启动操作系统,还要写各种其他的处理,我们想要把这些处理打成一个包(pack),所以就起了这么一个名字。最重要的核心内容非常非常短,如下所示:
本次的bootpack.c
void HariMain(void)
{
fin:
/*这里想写上HLT,但C语言中不能用HLT! */
goto fin;
}
这个程序第一行的意思是:现在要写函数了,函数名字叫HariMain,而且不带参数(void),不返回任何值。“{}”括起来的部分就是函数的处理内容。
C语言中所说的函数是指一块程序,在某种程度上可以看作数学中的函数一般,即从变量x取得值,将处理结果送给y。而上面情况下,既不从变量取得值,也不返回任何值,不太像数学中的函数,但在C语言中这也是函数。
goto指令是新出现的,相当于汇编语言中的JMP,实际上也是被编译成JMP指令。由“/*”和“*/”括起来的部分是注释,正如这里所写的那样,C语言中不能使用HLT,也没有相当于DB的命令,所以不能用DB来放一句HLT语句。
那么,这个bootpack.c是怎样变成机器语言的呢?如果不能变成机器语言,就是说得再多也没有意义。这个步骤很长,让我们看一看。
❏ 首先,使用cc1.exe从bootpack.c生成bootpack.gas。
❏ 第二步,使用gas2nask.exe从bootpack.gas生成bootpack.nas。
❏ 第三步,使用nask.exe从bootpack.nas生成bootpack.obj。
❏ 第四步,使用obi2bim.exe从bootpack.obj生成bootpack.bim。
❏ 最后,使用bim2hrb.exe从bootpack.bim生成bootpack.hrb。
❏ 这样就做成了机器语言,再使用copy指令将asmhead.bin与bootpack.hrb单纯结合到起来,就成了haribote.sys。
来来去去搞出了这么多种类的文件,那么下面就简单介绍一下吧。
cc1是C编译器,可以将C语言程序编译成汇编语言源程序。但这个C编译器是笔者从名为gcc的编译器改造而来,而gcc又是以gas汇编语言为基础,输出的是gas用的源程序。它不能翻译成nask。所以我们需要把gas变换成nask能翻译的语法,这就是gas2nask。
一旦转换成nas文件,它可就是我们的掌中之物了,只要用nask翻译一下,就能变成机器语言了。首先用nask制作obj文件。obj文件又称目标文件,源自英文的“object”,也就是目标的意思。程序是用C语言写的,而我们的目标是机器语言,所以这就是“目标文件”这一名称的由来。
可能会有人想,既然已经做成了机器语言,那只要把它写进映像文件里就万事大吉了。但很遗憾,这还不行,事实上这也正是使用C语言的不便之处。
目标文件是一种特殊的机器语言文件,必须与其他文件链接(link)后才能变成真正可以执行的机器语言。链接是什么意思呢?实际上C语言的作者已经认识到,C语言有它的局限性,不可能只用C语言来编写所有的程序,所以其中有一部分必须用汇编来写,然后链接到C语言写的程序上。
现在为止,都只有一个源程序,由它来直接生成机器语言文件,这好像是理所当然的,完全不用考虑什么目标文件的链接。但是这个问题以后要考虑了。下面我们来讲一下用汇编语言做目标文件的方法。
所以,为了将目标文件与别的目标文件相链接,除了机器语言之外,其中还有一部分是用来交换信息的。单个的目标文件还不是独立的机器语言,其中还有一部分是没完成的。为了能做成完整的机器语言文件,必须将必要的目标文件全部链接上。完成这项工作的,就是obj2bim。
bim是笔者设计的一种文件格式,意思是“binary image”,它是一个二进制映像文件。映像文件到底是什么呢?这么说来,磁盘映像也是一种映像文件。按笔者的理解,所谓映像文件即不是文件本来的状态,而是一种代替形式。英文里面说到image file,一般是指图像文件,首先要有一个真实的东西,而它的图像则是临摹仿造出来的,虽然跟它很像,但毕竟不是真的,只是以不同的形式展示出原物的映像。
所以,实际上bim文件也“不是本来的状态,而是一种代替的形式”,也还不是完成品。这只是将各个部分全部都链接在一起,做成了一个完整的机器语言文件,而为了能实际使用,我们还需要针对每一个不同操作系统的要求进行必要的加工,比如说加上识别用的文件头,或者压缩等。这次因为要做成适合“纸娃娃操作系统”要求的形式,所以笔者为此专门写了一个程序bim2hrb.exe,这个程序留到后面来介绍。
可能有人会想:“我在Windows和Linux上做了很多次C程序了,既没用过那么多工具,也没那么多的中间文件就搞定了,这次是怎么回事呢?”说到底,这是因为那些编译器已经很成熟了。但是,如果我们的编译器能够直接生成可执行文件,那再想把它用于别的用途可就难了。
其实在编译器内部也要做同样的事,只是在外面看不见这些过程而已。这次提供的编译器,是以能适应各种不同操作系统为前提而设计的,所以对内部没有任何隐藏,是特意像这样多生成一些中间文件的。这样做的好处是仅靠这个编译器,就可以制作Windows、Linux以及OSASK用的可执行文件,当然,还有我们的“纸娃娃操作系统”的可执行文件。
根据以上内容,对Makefile也做了很大改动。如果大家想知道编译时指定了什么样的选项,可以看一看Makefile。
函数名HariMain非常重要,程序就是从以HariMain命名的函数开始运行的,所以这个函数名不能更改。执行这个函数,结果出现黑屏。这表示运行正常。
实现HLT(harib00j)
不让计算机处于HALT(HLT)状态心里就不舒服。我们做出的程序这么耗电,不把这个问题解决掉怎么能睡得着呢(笑)。我们来努力尝试一下吧。首先写了下面这个程序,naskfunc.nas。

naskfunc.nas也就是说,是用汇编语言写了一个函数。函数名叫io_hlt。虽然只叫hlt也行,但在CPU的指令之中,HLT指令也属于I/O指令,所以就起了这么一个名字。顺便说一句,MOV属于转送指令,ADD属于演算指令。
用汇编写的函数,之后还要与bootpack.obj链接,所以也需要编译成目标文件。因此将输出格式设定为WCOFF模式。另外,还要设定成32位机器语言模式。在nask目标文件的模式下,必须设定文件名信息,然后再写明下面程序的函数名。注意要在函数名的前面加上“_”,否则就不能很好地与C语言函数链接。需要链接的函数名,都要用GLOBAL指令声明。
下面写一个实际的函数。写起来很简单,先写一个与用GLOBAL声明的函数名相同的标号(label),从此处开始写代码就可以了。这次新出现的RET指令,相当于C语言的return,意思就是“函数的处理到此结束,返回吧”,简洁明了。在C语言里使用这个函数的方法非常简单。我们来看看bootpack.c。
本次的bootpack.c
/*告诉C编译器,有一个函数在别的文件里*/
void io_hlt(void);
/*是函数声明却不用{ },而用;,这表示的意思是:函数是在别的文件中,你自己找一下吧!*/

void HariMain(void)
{
fin:
io_hlt(); /*执行naskfunc.nas里的_io_hlt*/
goto fin;
}
源程序里的注释写得很到位,请仔细阅读一下。好了,源程序增加了,Makefile也进行了添加,那么赶紧运行“make run”看看吧。
结果虽然还是黑屏,但程序运行肯定是正常的。














 484
484











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









