







链接定位是系统级软件开发过程中必不可少的一部分,嵌入式软件开发均属于系统级开发,绝大部分嵌入式软件都涉及到链接定位脚本文件;链接定位脚本使得我们的目标代码组织更加灵活。
1. 链接定位脚本文件说明
链接定位过程一般由链接器根据链接定位脚本完成,比较简单的系统可以通过设置链接器开关选项取代链接定位脚本;链接定位的关键是链接定位脚本的编写。我们从典型的目标文件结构开始,来介绍链接定位脚本文件的编写。下面是该系统一个目标文件的典型组织:
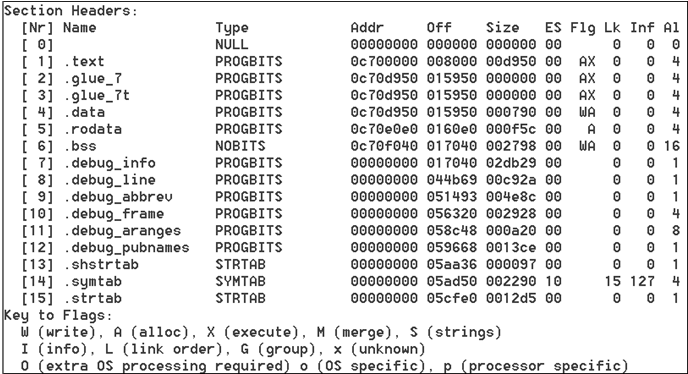
图A-1 目标文件典型组织图
其中第二栏开始分别展示了该文件各个段(Sections)的属性:名称(Name)、类型(Type)、地址(Addr)、偏移(Offs)、大小(Size)、固定单元大小(Es)、标志(Flg)、连接依赖(Lk)、附加属性(Inf)、字节对其宽度(Al)。
地址部分(Addr)描述了这一段在目标系统中的地址,而偏移(Offs)则记载了该段在目标文件中的偏移,大小(size)表示该段的实际长度;比如上图中.Text段的地址为0x0c700000,偏移为0x008000,大小为0x00d950,说明该段位于文件的偏移0x008000处,它将被下载到目标板0x0c700000处。
从段的分类来看,第7段以后的内容仅仅与调试有关,涉及到定位的也就是前面几段:.text、.data、.rodata、.bss,下面是一个具体的链接定位脚本文件:
SECTIONS
{
. = 0x0c200000; /*赋当前地址,后续的代码将从该地址开始存放 */
.text: { (.text) } /*.text段表示代码段,从0x0c200000开始放置代码*/
Image_RW_Base = .; /* RW(可写数据)基址,实际上是在这里声明了一个全局符号,我们可以在程序中使用该符号,它等同于在代码中声明一个全局变量,但它的值由链接器指定,在这里“=.”表示该符号的值等于当前地址;下面的定义类似*/
.data : { (.data) } /*数据段, 保存已经初始化的全局数据 */
.rodata : { *(.rodata) } /*只读数据段, 保存已经初始化的全局只读数据*/
Image_ZI_Base = .; /*ZI基地址, 需要清零的区域 zero init*/
.bss : { *(.bss) } /*堆栈段,未初始化的全局变量也保存在此*/
__bss_start__ = .; /* bss的基地址*/
__bss_end__ = .; /* bss的结束地址*/
__EH_FRAME_BEGIN__ = .; /* FRAME开始地址(基地址)*/
__EH_FRAME_END__ = .; /* FRAME结束地址,gcc编译器使用 */
PROVIDE (__stack = .); /* 当前地址赋给栈,栈地址一般是可读写区最高处*/
end = .; /* 结束地址*/
_end = .; /* 结束地址*/
.debug_info 0 : { *(.debug_info) } /*调试信息*/
.debug_line 0 : { *(.debug_line) } /*调试信息*/
.debug_abbrev 0 : { *(.debug_abbrev)} /*调试信息*/
.debug_frame 0 : { *(.debug_frame) } /*调试信息*/
}
text段是程序代码段,紧随其后的是几个符号定义,它们是由编译器在编译连接时自动计算的,当我们在链接定位文件中申明这些符号后,编译连接时,该符号的值会自动代入到源程序的引用中,如果你想进一步了解连接定位的一些含义,可以参考编程手册中的ld一章。
data段的起始位置也是由连接定位文件所确定,大小在编译连接时自动分配,它和我们的程序大小没有关系,但和程序使用到的全局变量,常量数量相关。
bss的初始值也是由我们自己定义的连接定位文件所确定,我们应该将它定义在可读写的RAM区内,stack的顶部在可读写的RAM区的最后,我们可以非常灵活的定义其起点和大小,但对大部分情况来说,程序区在ROM或FLASH中,可读写区域在SRAM或DRAM中,我们可以考虑一下自己程序规模,函数调用规模,存储器组织,然后参照一个连接定位文件稍加修改就可以了。
2. 链接定位脚本修改实例
SECTIONS
{
. = 0x00000000; /*将代码段起始地址修改到0*/
.text : { *(.text) }
Image_RW_Base = .;
.=0xc0000000 /*设置数据段从0xc0000000开始存放*/
.data : { *(.data) }
.=0xd0000000 /*设置只读数据段从0xd0000000开始存放*/
.rodata : {*(.rodata) }
Image_ZI_Base = .;
.bss : { *(.bss) }
Image_ZI_Limit = .;
/*申明一个符号download_size */
download_size =SIZEOF(.text)+SIZEOF(.data)+SIZEOF(.rodata)+SIZEOF(.bss);
__bss_start__ = .;
__bss_end__ = .;
__EH_FRAME_BEGIN__ = .;
__EH_FRAME_END__ = .;
PROVIDE (__stack =.);
end = .;
_end = .;
.debug_info 0 : { *(.debug_info) }
.debug_line 0 : { *(.debug_line) }
.debug_abbrev 0 : { *(.debug_abbrev)}
.debug_frame 0 : { *(.debug_frame) }
}















 1221
1221

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









